Метод приведения в задачах динамики машин и его реализация на примере момента инерции простого механизма с использованием Python

Автор: Александров М.А., Александрова М.Ю.
Рубрика: Педагогические науки
Статья в выпуске: 6 (105) т.27, 2025 года.
Бесплатный доступ
В настоящей статье изложены теоретические основы метода приведения как эффективного инструмента упрощения динамического анализа сложных механических систем с одной степенью свободы. Рассмотрены физические принципы приведения – равенство кинетических энергий и эквивалентность мощностей внешних и приведённых сил, позволяющие заменить реальный многозвенный механизм его динамической моделью в виде одного условного звена (звена приведения). Подробно выведены аналитические зависимости для расчёта приведённого момента инерции кривошипноползунного механизма с нулевым эксцентриситетом, включая точные и приближённые соотношения для малых углов. На примере двухтактного двигателя внутреннего сгорания автономной электроустановки выполнены численные расчёты приведённого момента инерции для 12 характерных положений механизма за один рабочий цикл. Для автоматизации вычислений разработан и представлен программный код на языке Python, реализующий расчёт по полученным формулам и визуализацию результатов. Демонстрируется, как современные ИТинструменты повышают наглядность и эффективность решения инженерных задач. Особое внимание уделено педагогическому аспекту: применение программирования в сочетании с фундаментальными разделами механики способствует формированию у студентов междисциплинарных компетенций, интегрирующих знания из теории механизмов и машин, теоретической механики и цифровых технологий, что соответствует требованиям современного инженерного образования.
Метод приведения, приведённый момент инерции, кривошипно-ползунный механизм, Python, программирование в инженерных расчётах
Короткий адрес: https://sciup.org/148332933
IDR: 148332933 | УДК: 378.147 | DOI: 10.37313/2413-9645-2025-27-105-5-12
Method of reduction in machine dynamics problems and its implementation on the example of determining the reduced moment of inertia of a simple mechanism using Python
This article presents the theoretical foundations of the reduction method as an effective tool for simplifying the dynamic analysis of complex mechanical systems with a single degree of freedom. The physical principles of reduction—the equality of kinetic energies and the equivalence of the powers of external and reduced forces—are considered, allowing a real multilink mechanism to be replaced with its dynamic model in the form of a single imaginary link (the reduction link). Analytical dependencies for calculating the reduced moment of inertia of a slidercrank mechanism with zero eccentricity are derived in detail, including exact and approximate relationships for small angles. Using a twostroke internal combustion engine of an autonomous electrical installation as an example, numerical calculations of the reduced moment of inertia for 12 characteristic positions of the mechanism during a single operating cycle are performed. To automate the calculations, Python code has been developed and presented, implementing the calculations using the obtained formulas and visualizing the results. It is demonstrated how modern IT tools improve the clarity and efficiency of engineering problem solving. Particular attention is paid to the pedagogical aspect: the use of programming in combination with fundamental sections of mechanics contributes to the development of interdisciplinary competencies in students, integrating knowledge from the theory of mechanisms and machines, theoretical mechanics, and digital technologies, which meets the requirements of modern engineering education.
Текст научной статьи Метод приведения в задачах динамики машин и его реализация на примере момента инерции простого механизма с использованием Python
EDN: NQSRMF
Введение . В общем случае механизмы представляют сложную нагруженную систему связанных между собой звеньев. Определение закона движения такой системы по известным приложенным к ней силам представляет собой сложную задачу. Поэтому для решения задач динамики, связанных с определением закона движения машины под действием заданных сил, удобно пользоваться понятиями приведенной массы и приведенной силы.
История вопроса . Введение этих величин позволяет заменить движение всего механизма движением его упрощенной динамической модели в виде одного звена, называемого звеном приведения (рис. 1). При этом решение системы дифференциальных уравнений сводится к решению одного уравнения этого звена, которое определяет закон движения механизма. Такой подход называют методом приведения. Метод приведения, строго обоснованный в классических трудах И.И. Артоболевского [Артоболевский И.И.], широко применяется при анализе динамики механизмов с одной степенью свободы. В учебных пособиях Е.К. Кичаева и его соавторов [Кичаев Е.К. а), б)], приведены расчётные схемы и примеры для кривошипно-ползунного механизма, однако решения чаще основаны на ручных вычислениях и приближённых соотношениях. Возможности цифровизации инженерных расчётов с использованием Python отмечены в работах С.В. Назарова [Назаров С.В.], но конкретные приложения к динамике машин остаются недостаточно раскрытыми.
В настоящей работе реализуется точный численный расчёт приведённого момента инерции для полного цикла (0°–360°); разработан открытый код программного решения на Python, доступного для воспроизведения и модификации студентами; приведена интеграция метода приведения в педагогическую практику как средства формирования цифровой инженерной компетентности.
Методы исследования . В работе использован комплексный подход, объединяющий теоретический анализ, математическое и компьютерное моделирование, а также элементы педагогического проектирования. На первом этапе проведён ретроспективный анализ научно-методической литературы по теории механизмов и машин и дидактическим аспектам применения цифровых инструментов в инженерном образовании. На втором этапе выполнено аналитическое моделирование динамики кривошипно-ползунного механизма с использованием метода приведения – получены точные и приближённые формулы для приведённого момента инерции, основанные на принципах сохранения кинетической энергии и эквивалентности мощностей. На третьем этапе реализовано численное моделирование: с помощью языка программирования Python разработана вычислительная модель, позволяющая автоматизировать расчёт приведённого момента инерции в зависимости от угла поворота кривошипа и визуализировать результаты. Программная реализация рассматривается как педагогический инструмент, способствующий наглядности, интерактивности и самостоятельной исследовательской деятельности студентов.
Таким образом, методологическую основу исследования составляют: анализ научных и учебных источников, математическое моделирование, вычислительный эксперимент и педагогическое проектирование учебной задачи с опорой на междисциплинарную интеграцию знаний.
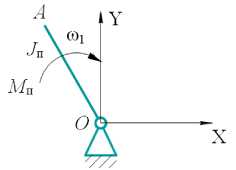
Результаты исследования . Звено приведения, в качестве которого обычно принимается начальное звено, совершающее вращательное движение, обладает приведенным моментом инерции J п , находится под действием приведенного момента сил M п и имеет угловую скорость ω .
Рис. 1 . Динамическая модель механизма с одной степенью свободы (Dynamic model of a mechanism with one degree of freedom)
Приведение сил основано на принципе возможных перемещений, согласно которому работа всех внешних сил на соответствующих им элементарных перемещениях равна нулю
∑ F k ⋅δ s k + ∑ M k ⋅δϕ k = 0 . kk
Все силы могут быть заменены одной силой F п или одним моментом M п , называемые приведенными, мощностькоторых равна сумме мощностей приводимых сил.
P п = ∑ P i ,
i где P= M⋅ ω – мощность приведенного момента, ∑ Pi = ∑ Fi ⋅ vi + ∑ M i ⋅ ωi – мощность приводимых сил, Fi, Mi – главный вектор сил и главный момент, которые приложены к i – звену механизма.
Как правило, приведенную силу помещают в точку А кривошипа, а приведенный момент рассматривают относительно точки. Приведенный момент M п учитывает лишь тангенциальную составляющую силы F п , знак M п соответствует знаку суммы мощностей, передаваемых звеньям.
Приведенный момент сил определяется по формуле
M п = F n • = У FvL + У M i -°
® i i « 1 i ® i
Приведение масс основано на равенстве кинетических энергий звена приведения и звеньев механизма
T n = У t ■
i
где Т п = J п • -^— кинетическая энергия звена приведения, ^ Tt = У J • + ^
v i 2 i 2
кине-
тическая энергия звеньев механизма.
Приведенный момент инерции определяется по формуле
22 22
J п = У J i -° + У m , или J п = У J-d ^ i- + У m i -d ii l® 1 J i l® 1 ) i I d ф 1 ) i \d ф 1 )
Рассмотрим кривошипно-ползунный механизм, звено приведениякоторого кривошип, вращается с угловой скоростью « . Определим приведенный момент инерции
J п = J 1 + Js 2 ■ u 21 + m2 ■ u 31 + m3 ■ u 41
ю, d ф, v? ds? v ds, где u 21 = —2 = —2, u31 = — = —2, u 41 = — = —3— передаточные отношения скоростей ю1 d ф1 ю1 d ф1 ю1 d ф1
звеньев механизма к скорости звена приведения, ю2 - угловая скорость шатуна, v2 - скорость цен тра масс шатуна, v3 – скорость ползуна.
Положение механизма с одной степенью свободы в любой момент времени может быть определено одним независимым параметром, например φ1 – углом поворота кривошипа. Введем следующие обозначения: r - длина кривошипа, l - длина шатуна, ф2 - угол поворота шатуна, а - положение цен тра масс шатуна, X = — .
Для кривошипно-ползунного механизма, эксцентриситет которого равен нулю, справедливы следующие равенства:
r sin ф 1 = l sin ф 2 , sin ф 2 = X sin ф 1 , cosф 2 = ^1 -X2 sin2 ф 1 , (7)
причем для малых X можно принять cos ф 2 = ^1 — X2 sin2 ф 1 « 1 .
Дифференцируя выражения (7) найдем угловую скорость шатуна
. cos ф1 X cos ф1
ю 2 = о.) , X------- = —« . 1 , (8)
cos ф 2 ^1 — X2 sin2 ф 1
для малых X : о 2 = -« 1 X cos ф 1 .
Положение ползуна
( 1
sin2 ф 1 I .
X 3 = r cos ф 1 + 1 cos ф2 = r I cos ф 1 + —
Дифференцируя выражение (9) найдем скорость ползуна v3 = -o1 r 1 +
I
Л cos ф 1
л 2 • 2
- Л sin ф 1 J
sin ф 1 ,
для малых Л : V 3 = -o r I sin ф + — sin 2 ф 1 I .
Положение центра масс шатуна
( . a
x 2 = r I cos ф 1 + —
sin2 ф 1 I ,
y2 = r sin ф1 -al sin ф2 = r (1 -a) sin ф.
Дифференцируя выражения (11) найдем проекции скорости центра масс шатуна vx 2 = -o1 r 1 +
a! cos ф 1
Л 2 • 2
- Л sin ф1
sin Ф 1 ,
vy 2 = -®1 r (a-1) cos ф1.
для малых Л : v x 2 =-o r I sin ф 1 +“■ sin2ф 1 | , v y 2 = -0 r ( a- 1 ) cos ф 1 .
Найдем скорость центра масс шатуна
v =
v x 2 + v y 2 = o 1 r
, a! cos ф,
1 + , 1
sin2 ф 1 ^
sin2 ф 1 + ( a - 1 ) 2 cos2 ф 1 ,
для малых Л : v = o r.
. , a!
sin ф 1 + sin 2ф 1
cos2 ф 1
Для примера рассмотрим кривошипно-ползунный механизм двухтактного двигателя внутреннего сгорания (ДВС) автономной электроустановки [Кичаев Е.К. а), б)], который приводит в движение электрогенератор, вырабатывающий электрический ток. Исходные данные расчета представлены в табл. 1.
Таб. 1 . Исходные данные расчета кривошипно-ползунного механизма ДВС (Initial data for calculating the crank-slider mechanism of the internal combustion engine)
|
Длина кривошипа |
l 1 , м |
0.06 2 |
|
Длина шатуна |
l 2 , м |
0.24 9 |
|
Коэффициент, определяющий положение центра |
α = AC / АВ |
1/3 |
|
масс шатуна |
||
|
Масса кривошипа |
m 1 , кг |
1.87 |
|
Масса шатуна |
m 2 , кг |
2.49 |
|
Масса ползуна |
m 3 , кг |
1.87 |
|
Момент инерции кривошипа |
J 1 , кгм 2 |
0.00 2 |
|
Момент инерции шатуна |
J 2 , кгм 2 |
0.03 |
Рис. 2 . Код расчета приведенного момента инерции кривошипно-ползунного механизма на языке программирования Python (Python code for calculating the reduced moment of inertia of a slider-crank mechanism) import numpy as np # Параметры механизма г = 0.062 # длина кривошипа, м
1 = 0.24867 # длина шатуна, м а = 0.33333 # положение центра масс шатуна
1а = г/1 # отношние длины кривошипа к длине шатуна
-
# Массы и моменты инерции
ml =1.87 ♦ масса кривошипа, кг m2 =2.49 # масса шатуна, кг m3 =1.87 # масса ползуна, кг
Л= 0.002 # момент инерции кривошипа, кг 'М2
J2 = 0.2*т2*1**2 # момент инерции шатуна относительно центра масс, кг-м2
-
♦ Угол поворота кривошипа (от 0 до 360 градусов) phi_deg = np.linspace(0, 360, 360) phi rad = np.deg2rad(phi deg) ♦ Производная угла шатуна по углу кривошипа def dtheta2 dphi(г, la, phi):
return -г * np.sqrt(np.sin(phi)**2 * (1 + (a*la * np.cos (phi)) / np.sqrt(l - la**2 * np.sin(phi)**2))**2+(a-1)**2*np.cos(phi)**2) # Расчёт компонентов приведённого момента инерции dtheta2 = dtheta2 dphi (r, la, phi rad) dS3 = dS3_dphi(r, la, phi_rad) dS2 = dS2 dphi (r, a, la, phi_rad) J_rot =J1 J slider = m3 * dS3**2 J link trans = m2 * dS2**2 J_link_rot = J2 * dtheta2**2 # Общий приведённый момент инерции J_total = JI + J_slider + J_link_trans + J_link_rot
Результаты расчета для двенадцати положений кривошипно-ползунного механизма ДВС в течение одного цикла приведены в таблице 2.
Таб. 2 . Приведенный момент инерции кривошипно-ползунного механизма ДВС (Reduced moment of inertia of the crank mechanism of the internal combustion engine)
|
Nп /п |
φ 1 |
u 21 |
u 31 |
u 41 |
J п |
|
0 |
0 |
-0.2493 |
-0.0413 |
0 |
0.008 2 |
|
1 |
30 |
-0.2176 |
-0.0489 |
-0.0377 |
0.012 1 |
|
2 |
60 |
-0.1277 |
-0.0597 |
-0.0605 |
0.018 2 |
|
3 |
90 |
0 |
-0.0620 |
-0.0620 |
0.018 8 |
|
4 |
120 |
0.1277 |
-0.0554 |
-0.0468 |
0.014 3 |
|
5 |
150 |
0.2176 |
-0.0459 |
-0.0243 |
0.009 8 |
|
6 |
180 |
0.2493 |
-0.0413 |
0 |
0.008 2 |
|
7 |
210 |
0.2176 |
-0.0459 |
0.0243 |
0.009 8 |
|
8 |
240 |
0.1277 |
-0.0554 |
0.0468 |
0.014 3 |
|
9 |
270 |
0 |
-0.0620 |
0.0620 |
0.018 8 |
|
10 |
300 |
-0.1277 |
-0.0597 |
0.0605 |
0.018 2 |
|
11 |
330 |
-0.2176 |
-0.0489 |
0.0377 |
0.012 1 |
|
12 |
360 |
-0.2493 |
-0.0413 |
0 |
0.008 2 |
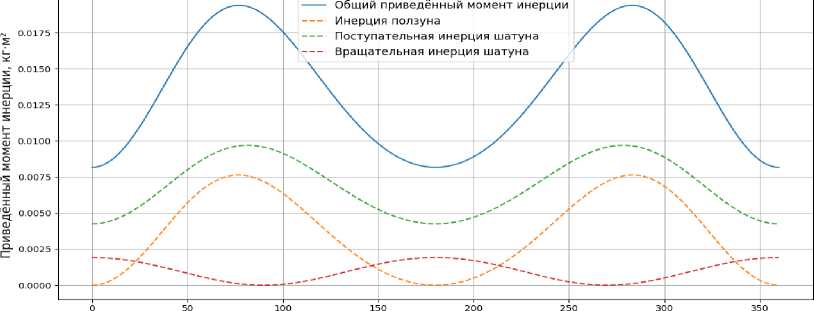
Зависимость приведенного момента кривошипно-ползунного механизма и его некоторых составляющих от угла поворота кривошипа показана на рис. 3.
Рис. 3 . Приведённый момент инерции кривошипно-ползунного механизма (Reduced moment of inertia of the slider-crank mechanism)
0.0200
Угол поворота кривошипа , град
Выводы . В ходе рассмотрения динамики механизмов с одной степенью свободы показано, что реальные сложные механические системы можно эффективно моделировать с использованием метода приведения. Понятия приведённой массы и приведённого момента сил позволяют существенно упростить динамический анализ, сводя движение всей системы к движению одного условного звена – звена приведения, обычно совпадающего с начальным звеном механизма.
Современные вычислительные технологии, такие как программирование на языке Python, позволяют автоматизировать подобные расчёты, делая их более наглядными и доступными для студентов технических специальностей. Использование искусственного интеллекта и программирования в учебном процессе способствует формированию междисциплинарных компетенций, включающих знания в области теории механизмов, теоретической механики, а также навыков работы с численными методами и современными инструментами разработки.
Таким образом, применение метода приведения в сочетании с численным моделированием является не только эффективным инженерным подходом, но и важным элементом практической подготовки будущих специалистов технической направленности.
