Методологический подход к исследованию и проектированию механических дисковых бункерных загрузочно-ориентирующих устройств

Автор: Васин С.А., Шевченко С.Н., Пантюхина Е.В., Маликов А.А.
Журнал: Известия Самарского научного центра Российской академии наук @izvestiya-ssc
Рубрика: Машиностроение и машиноведение
Статья в выпуске: 1 т.26, 2024 года.
Бесплатный доступ
В статье приводятся основные этапы исследования и проектирования механических дисковых бункерных загрузочно-ориентирующих устройств для асимметричных деталей тел вращения, позволяющие на основе закономерностей функционирования бункерных загрузочно-ориентирующих устройств гарантированно обеспечить требуемую производительность и высокую надежность технологического оборудования. Рассматриваются задачи, которые должны решаться на каждом этапе исследования и проектирования. Приведен подробный пример расчета, проектирования и исследования усовершенствованного механического дискового бункерного загрузочно-ориентирующего устройства с радиальными прямоугольными карманами, кольцевым ориентатором и радиальными пазами в форме гребенки для сплошной детали с торцом в форме усеченного конуса. Полученные в процессе исследования и проектирования усовершенствованной конструкции бункерного загрузочно-ориентирующего устройства результаты позволили определить диапазоны рабочих значений конструктивных параметров и окружной скорости захватывающих органов, при которых устройство будет надежно функционировать и будет обеспечена его наибольшая производительность.
Бункерное загрузочно-ориентирующее устройство, проектирование, вероятность захвата, ориентирование асимметричных деталей тел вращения
Короткий адрес: https://sciup.org/148328550
IDR: 148328550 | УДК: 621.9.06 | DOI: 10.37313/1990-5378-2024-26-1-70-75
Methodological approach to research and design of mechanical disk hopper-oriented devices
The article describes the main stages of research and design of mechanical disk hopper-orientating devices for asymmetric parts of rotating bodies, which make it possible to ensure the required productivity and high reliability of technological equipment based on the regularities of functioning of hopper-orientating devices. The tasks that should be solved at each stage of research and design are considered. A detailed example of the calculation, design, and investigation of an improved mechanical disk hopper feeding orientator with radial rectangular pockets, an annular orientator, and radial comb-shaped slots for a solid, frustoconical end piece is provided. The results obtained during the research and design of the improved design of the hopper feeding-orienting device made it possible to determine the ranges of operating values of the design parameters and the circumferential speed of the gripping organs, at which the device will reliably function and ensure its greatest feed rate.
Текст научной статьи Методологический подход к исследованию и проектированию механических дисковых бункерных загрузочно-ориентирующих устройств
В настоящее время при проектировании механических дисковых бункерных загрузоч-но-ориентирующих устройств (БЗУ), обеспечивающих подачу в оборудование массовых производств ориентированных асимметричных штучных изделий или их элементов, представляющих собой тела вращения, является необходимым и целесообразным применение научно обоснованной методологии, что позволит на основе закономерностей функционирования БЗУ обеспечить требуемую производительность и высокую надежность технологического оборудования.
спечивать свои функции только для деталей одного типа с конкретными геометрическими параметрами и незначительное изменение одного из размеров детали не позволит БЗУ реализовать процессы захвата, ориентирования и выдачи таких деталей. Во-вторых, в основе функционирования БЗУ лежит принцип вероятности захвата одной детали из их общей массы, поэтому на ранних этапах проектирования БЗУ определить фактические значения его производительности по известным классическим формулам без создания экспериментальной конструкции не представляется возможным БЗУ. В-третьих, БЗУ должно захватывать детали в требуемом ориентированном положении с наибольшей вероятностью и при этом обеспечивать надежное ориентирование деталей, захваченных карманом в неправильном положении [1].
Поэтому с целью обеспечения наибольшей эффективности на всех этапах проектирования БЗУ и в процессе его эксплуатации исследование и проектирование БЗУ для асимметричных деталей должны опираться на научно обоснованный методологический подход, который включает все стороны функционирования БЗУ и учитывает взаимосвязанное влияние его параметров и параметров штучных изделий или их элементов.
ЭТАПЫ ИССЛЕДОВАНИЯ И ПРОЕКТИРОВАНИЯ БУНКЕРНЫХ ЗАГРУЗОЧНО-ОРИЕНТИРУЮЩИХ
УСТРОЙСТВ
Научно обоснованный подход к исследованию и проектированию механических дисковых БЗУ для асимметричных деталей тел вращения основывается на теоретических и экспериментальных исследованиях [2 – 6] различных типов БЗУ и включает следующие этапы, представленные на рис. 1 в виде двух блоков – блока исследования и блока проектирования.
Блок проектирования представляет собой общеизвестные классические этапы проектирования БЗУ, включающие расчет объема бункера, привода и предохранительных устройств [7, 8]. Кроме этого на данном этапе выбирается тип БЗУ, которым можно ориентировать требуемый вид детали и закладываются общие принципы конструирования захватывающих и ориентирующих органов БЗУ
Блок исследования включает 3 основных этапа: разработка конструктивных ограничений на органы захвата и ориентирования; построение математических моделей вероятности захвата и производительности; построение математических моделей процесса ориентирования. В некоторых конструкциях БЗУ возникает необходимость разработки математических моделей процесса выдачи деталей из БЗУ в приемный лоток, что позволяет получить граничные значения окружной скорости захватывающих органов, при которых будет реализован процесс выдачи деталей из БЗУ.
На первом этапе в зависимости от вида и размеров детали необходимо разработать конструкцию захватывающих и ориентирующих органов БЗУ и определить диапазоны их геометрических размеров [9, 10]. После этого на основе параметрического синтеза нужно задать параметры, при которых будут обеспечиваться наиболее высокая вероятность захвата и надежное ориентирование деталей [11]. Полученные и предварительно принятые на первом этапе конструктивные параметры БЗУ будут использоваться в качестве исходных данных на следующем этапе.
На втором этапе разрабатывается математическая модель вероятности захвата деталей в БЗУ и его производительности [12]. Для до-
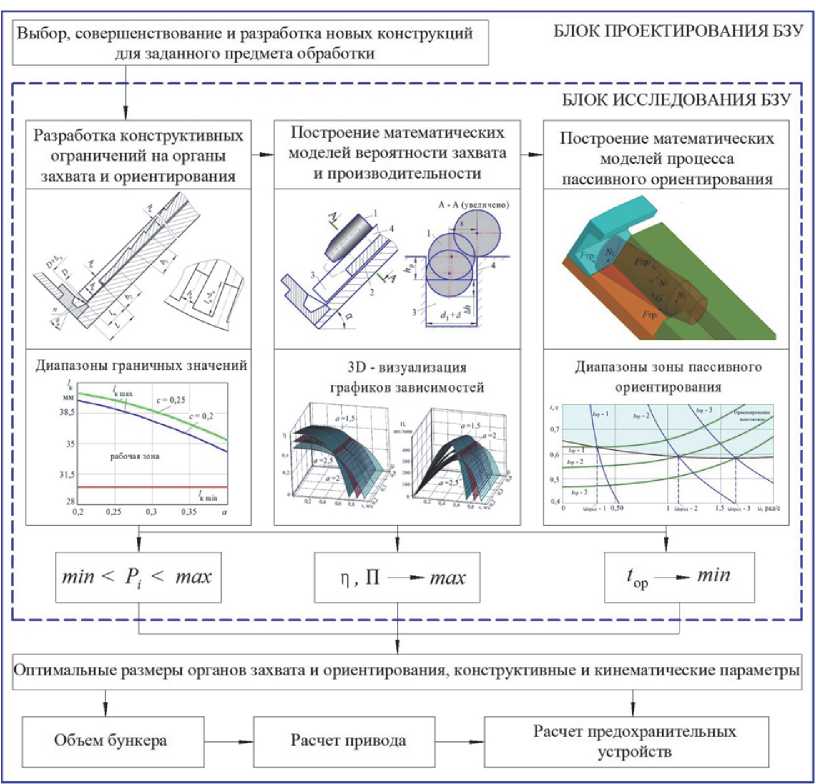
Рис. 1. Этапы исследования и проектирования механических дисковых БЗУ для асимметричных деталей тел вращения
стижения поставленной цели на данном этапе решаются задачи по определению вероятности нахождения детали в благоприятном для захвата положении при различных способах ориентирования деталей, вероятности отсутствия помех из-за взаимосцепляемости деталей, предельной окружной скорости по захвату, что в совокупности позволит получить математическую модель вероятности захвата различных деталей в механических дисковых БЗУ. Значимость разработанных моделей заключается в возможности оценки на ранних этапах проектирования БЗУ его максимальных возможностей и выбора оптимальных параметров с учетом взаимосвязанного влияния на производительность БЗУ его конструктивных параметров, окружной скорости захватывающих органов, параметров, характеризующих детали, а также коэффициентов трения, как между деталями, так и между деталями и конструктивными элементами БЗУ.
На третьем этапе решаются задачи обеспечения надежности БЗУ, заключающиеся в разработке математических моделей процесса ориентирования [13]. Это позволяет определить граничные значения окружной скорости захватывающих органов, при которых будет реализован процесс ориентирования деталей в БЗУ. При этом надежность БЗУ оценивается исходя из следующего. Во-первых, в захватывающий орган должна полностью запасть только та деталь, которая находится в правильном положении, вероятность ее западания должна быть максимальной, а размеры захватывающего органа не должны позволить одновременному западанию в него нескольких деталей. Во-вторых, детали, находящиеся в неправильном положении, могут лишь частично запасть в карман; величина их погружения в карман должна быть достаточной для того, чтобы в зоне ориентирования такие детали под действием собственного веса покинули захватывающие органы (в случае пассивного ориентирования) или переориентировались в правильное положение (в случае активного ориентирования).
ПРИМЕР РАСЧЕТА И ПРОЕКТИРОВАНИЯ БУНКЕРНОГОЗАГРУЗОЧНО-
ОРИЕНТИРУЮЩЕГО УСТРОЙСТВА
Рассмотрим пример проектирования и расчета основных параметров БЗУ с радиальными прямоугольными карманами, кольцевым ори-ентатором и радиальными пазами в форме гребенки [14] для сплошной детали, один из торцов которой выполнен в форме усеченного конуса, с геометрическими размерами d 1 = 0,01 м, d 2 = 0,007 м, l = 0,03 м, / 1 = 0,024 м и массой m = 0,004 кг ( / / d 1 = 3 , d 2 / d 1 = 0,7 ); коэффициенты трения об элементы БЗУ ц = 0,4 и между деталями ц о = 0,35 .
Для автоматической загрузки детали выбираем БЗУ с радиальными прямоугольными карманами, кольцевым ориентатором и радиальными пазами в виде гребенки. Переведем размеры деталей в заменяющие коэффициенты: a = d 1 /I = 1/3 , с = d 2 /I = 0,233 , f = 0,8 . Центр масс детали получаем равным хс = 0,014 .
Первый этап проектирования БЗУ осуществляем в следующей последовательности. По формулам, представленным в табл. 1 были определены диапазоны основных параметров органов захвата и ориентирования. В таблице a - с
Ф = , .
V(a-c)2+4(1 - f )2
В соответствии с рекомендациями [9] выбраны следующие параметры захватывающих и ориентирующих органов БЗУ, которые будут использованы при моделировании производительности и процесса пассивного ориентирования: А = 0,2, тогда b к = 10,2 мм, l к = 24 мм, а к = 28° , n = 10 мм, b i = 24 мм, 8 = 12 мм . Затем по известным формулам определяем шаг t и количество к захватывающих органов, задавая R = 0,25 м, получаем t = 24 мм, к = 65,42. Задаем к = 66 и пересчитываем шаг захватывающих органов и расстояние 5 между карманами. Получаем t = 23,8 мм, 5 = 11,8 мм.
На втором этапе исследования и проектирования БЗУ необходимо разработать математические модели вероятности захвата деталей в БЗУ и его производительности. Определим последовательно все требуемые параметры модели. Для определения максимального значения вероятности захвата n max определим значения вероятностей P i нахождения деталей по направлению к карману в положении, благоприятном для захвата, и вероятности pc того, что захвату не помешает взаимосце-пляемость деталей. Получаем соответственно р i = 0,029 , p 11 = 0,011 и р iii = 0,959 , 5П = 24,57°, p i max = 0,0053 , Y‘ = 27,49° , в = 22,62° , p i min = 0,013 . Для вычисления зоны захвата ф 3 используем выражение, представленное в работе [12] и получаем ф 3 =92,8 ° , тогда k = 40. Тогда по выражению с помощью разработанной программы находим р ^ = 0,42. Вероятность р с = 0,844 . Тогда максимальное значение вероятности захвата n max = 0,354 . Предельная окружная скорость по захвату и пред = 0,321 м/с; тогда £ = 94,685 .
Получим математические модели вероятности захвата и производительности БЗУ
П = 0,354 ■ (1 - 94,685 -£ 4) ,
П = б0^. [0,354 ^ (1 _ 94,685 ■£ 4)] .
Таблица 1. Конструктивные ограничения и диапазоны значений параметров конструктивных элементов БЗУ
|
Элемент и его параметры |
Параметр |
Значение |
||||
|
min |
max |
|||||
|
а ПЗ 3 ПЗ W |
Ширина |
b K |
a • l - 10мм |
a • l + A -10,3мм |
||
|
Длина |
l K |
f • l - 24мм |
l - a • l sin P - 27,6мм |
|||
|
а о ей К ф S О |
Угол при вершине |
«к K |
2arccos |
1 |
-11,42 ° |
2 arcsin ( ф ) - 28,07 ° |
|
v 7(1 + 0,25 A 12v |
||||||
|
Размер паза |
n |
a • l • cos ( arcsin ф ) = 9,7мм |
a • l - 10мм |
|||
|
ей си хо си Он |
Шаг |
b l |
al — tg ( a д + arcsin ф ) + + f • l - b • l = 18,07 мм |
f • l - 24мм |
||
На третьем этапе проектирования БЗУ определим время t op пассивного ориентирования детали и сравним его с временем t пр прохождения диском зоны ф о пассивного ориентирования. Составив условия статического равновесия детали в кармане, получим математические зависимости для определения угла у о, при котором начинается процесс движения детали из кармана. Получим ф о = 17,027° и ф у = 34,054° .
Процесс пассивного ориентирования детали состоит из четырех этапов, для каждого из которых были получены дифференциальные уравнения движения в виде уравнений Лагранжа второго рода и разработаны программы в среде MathCad, позволяющие вычислить время каждого этапа.
Определяем время и угловую скорость детали: на этапе 1 - ti = 0,071 с, to| = 0,864 рад/с; на этапе 2 - 12 = 0,117 с, to2 = 2,7 рад/с; суммарное время этапов 1 и 2 ti-2 = 0,188 с; на этапе 3 - t3 = 0,114 с, tog = 11 рад/с; суммарное время этапов 1 - 3 t1—3 = 0,302 с; на этапе 4, состоящем из двух подэтапов - 141 = 0,096 с, и4 1 = 0,318 м/с, тогда суммарное время этапов 1 - 4.1 будет равно t1—4 1 = 0,398 с; для второго подэтапа этапа 4 14.2 = 0,141 с, и4 2 = 0,753 м/с. Получаем суммарное время всех этапов tор = ^—4 = 0,539 с. По аналогии с определением времени движения детали при угловой скорости вращающегося диска to = 0,5 рад/с были получены значения суммарного времени при to = 1 рад/с - tор = 0,555 с и при to = 1,5 рад/с -1ор = 0,609 с. Для дальнейших исследований угловая скорость вращающегося диска была переведена в окружную скорость за- хватывающих органов по формуле и = to- R.
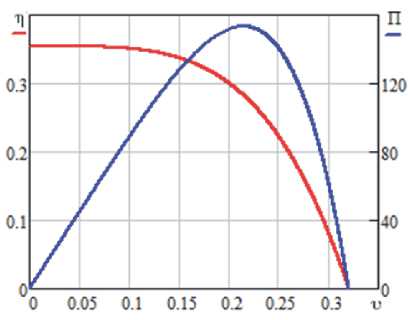
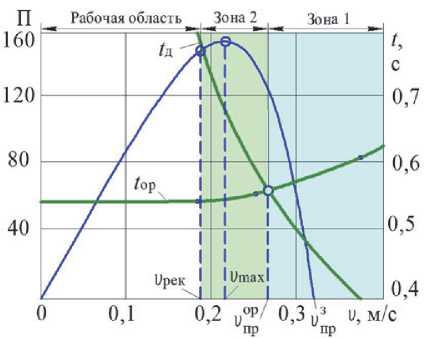
На рис. 2 приведены результаты математического моделирования вероятности захвата, производительности и времени пассивного ориентирования деталей в БЗУ.
Как показывают графики максимальная производительность БЗУ составляет 153 шт./мин при U max = 0,214 м/с. Так как при данном значении окружной скорости возникают сильные колебания значений производительности, то рекомендуемыми значениями рабочей скорости будут значения меньшие U peK < 0,193 м/с. Предельной окружной скоростью по ориентированию будет значение и Пр = 0,267 м/с, поэтому в зоне 1 ориентирование невозможно. В диапазоне окружных скоростей от U peK до и Пр захват деталей будет не стабильным (зона 2). В связи с вышеизложенным БЗУ будет надежно работать при рабочих окружных скоростях U p < 0,18 м/с.
Окончательными этапами исследования и проектирования БЗУ являются определение объема бункера, образованного обечайкой и вращающимся диском, конструирование привода и предохранительных устройств, подробная методика для расчета которых приведена в работе.
ЗАКЛЮЧЕНИЕ
Предлагаемая методология проектирования и исследования механических дисковых БЗУ для асимметричных деталей тел вращения рассматривается не с позиций создания просто работоспособной конструкции, а реализуется в рамках научно обоснованного методологического подхода, включающего все особенности функционирования БЗУ и учитывающего взаимос-
a
б
Рис. 2. Результаты исследования вероятности захвата (a), производительности БЗУ (шт./мин) (а, б) и времени пассивного ориентирования (б)
вязанное влияние его параметров и параметров загружаемых деталей, что позволяет обеспечить наибольшую эффективность на всех этапах проектирования БЗУ и в процессе его эксплуатации.
Список литературы Методологический подход к исследованию и проектированию механических дисковых бункерных загрузочно-ориентирующих устройств
- Васин, С.А. Основные направления проектирования механических дисковых бункерных загрузочных устройств для асимметричных деталей формы тел вращения / С.А. Васин, Е.В. Пантюхина // Вестник Ростовского государственного университета путей сообщения. – 2023. – № 1. – С. 8–15.
- Pantyukhina E.V., Preis V.V., Puzikov I.V., Dyakova E.V. Results of a theoretical and experimental research of a vertical hopper feeding device with rollers for fl at and close-to-equal-sized parts with implicit asymmetry// IOP Conf. Series: Journal of Physics: Conference Series. 2021 1901 (2021) 012017 DOI:10.1088/1742-6596/1901/1/012017.
- Pantyukhina E.V., Puzikov I.V., Erzin O.A. Scientifi c basis of design of automatic hopper feeding device for three-piece caps // Lecture Notes in Mechanical Engineering: Proceedings of the 9th International Conference on Industrial Engineering (ICIE 2023), Sochi, Russia, 2023, Р. 661–670.
- Давыдова, Е.В. Теоретические основы проектирования дискового зубчатого бункерного загрузочного устройства с кольцевым ориентатором / Е.В. Давыдова, В.В. Прейс // Сборка в машиностроении, приборостроении. – 2013. – № 7. – С. 8–14.
- Пантюхина, Е.В. Теоретическое исследование производительности механического дискового бункерного загрузочного устройства с тангенциальными карманами для элементов патронов стрелкового оружия / Е.В. Пантюхина // В сборнике: Будущее машиностроения России. Сборник докладов: в 2 томах. Союз машиностроителей России, Московский государственный технический университет имени Н.Э. Баумана (национальный исследовательский университет). 2020. С. 12-15.
- Давыдова, Е.В. Механические бункерные загрузочные устройства в пищевой промышленности / Е.В. Давыдова, В.В. Прейс. – Тула: Изд-во ТулГУ, 2012. – 164 с.
- Давыдова, Е.В. Методика расчета и проектирования механических дисковых бункерных загрузочных устройств / Е.В. Давыдова, В.В. Прейс//Известия Тульского государственного университета. Серия: Машиноведение, системы приводов и детали машин. 2006. С. 57-64.
- Усенко, Н.А. Системы автоматической загрузки штучных предметов обработки в технологические машины-автоматы / Н.А. Усенко, В.В. Прейс, Е.В. Давыдова, Е.С. Бочарова. Под ред. проф. В.В. Прейса. – Тула: Изд-во ТулГУ. – 2013. – 310 с.
- Пантюхина, Е.В. Математическое моделирование геометрических параметров органов захвата и ориентирования дискового бункерного загрузочного устройства с радиальными карманами и кольцевым ориентатором / Е.В. Пантюхина // Известия Тульского государственного университета. Технические науки. – 2023. – № 7. – С. 135–140.
- Пантюхина, Е.В. Математическое моделирование геометрических параметров органов захвата и ориентирования дискового бункерного загрузочного устройства с зубьями и кольцевым ориентатором / Е.В. Пантюхина // Известия Тульского государственного университета. Технические науки. – 2023. – № 7. – С. 141–144.
- Пантюхина, Е.В. Основные этапы параметрического синтеза механических дисковых бункерных загрузочных устройств для деталей с неявной асимметрией / Е.В. Пантюхина, И.В. Пузиков // В сборнике: Современные технологии сборки. Материалы VIII Международного научно-технического семинара. Москва, 2023. С. 99-106.
- Васин, С.А. Методика определения вероятности захвата асимметричных деталей формы тел вращения в дисковых бункерных загрузочно-ориентирующих устройствах / С.А. Васин, Е.В. Пантюхина // Вестник МГТУ им. Н.Э. Баумана. Сер. Машиностроение. – 2023. – № 3. – С. 64–88. – DOI: 10.18698/0236-3941-2023-3-64-88.
- Pantyukhina E.V., Preis V.V., Pantyukhin O.V. Passive orientation of the parts in the mechanical disk hopper feeding device with an annular orientator and radial grooves// IOP Conf. Series: Journal of Physics: Conference Series 1791 (2021) 012105.
- Прейс В.В., Пантюхина Е.В. Бункерное загрузочное устройство для цилиндрических заготовок с конической формой одной из концевых частей: пат. 2720017 (РФ). 2020.
