Методы построения энергетически оптимальных алгоритмов движения шагающих машин

Бесплатный доступ
Короткий адрес: https://sciup.org/14967739
IDR: 14967739 | УДК: 629.1.03
Текст статьи Методы построения энергетически оптимальных алгоритмов движения шагающих машин
Одним из сдерживающих факторов развития и широкого применения шагающих машин является низкая энергетическая эффективность их приводов. Необходимая для обеспечения мощность двигателя в приводе курсового движения шагающих машин пропорциональна кубу скорости 2, что значительно ограничивает увеличение скорости движения шагающих машин.
Известны различные варианты уменьшения энергозатрат, связанных с периодическим разгоном-торможением неуравновешенных движителей машины: увеличение отношения продолжительности фазы переноса к продолжительности опорной фазы (увеличение коэффициента режима механизма шагания) 3, введение в схему механизма шагания рекуператора механической энергии 4 . Однако эти меры приводят к усложнению конструкции машины, увеличению ее массы и снижению КПД приводов, эффективность работы рекуператора зависит от скорости движения машины, что затрудняет его использование при переменных режимах движения.
Для шагающих машин с цикловыми движителями правомерна модельная задача определения такого закона изменения относительной горизонтальной скорости опорной точки механизма шагания, при котором мощность приводного двигателя во время движения будет постоянна и минимальна.
Примером шагающей машины, для которой может быть поставлена такая задача, является шагающая машина «Восьминог»5 массой 4,5 т (рис. 1). Для существующего привода данной машины при средней скорос- ти движения Vcp = 0,068 м/с максимальное значение реактивной мощности привода, требуемое на поддержание курсового движения машины без учета энергозатрат на работу по преодолению сил тяжести и сил сопротивления, – менее 5 Вт, а при скорости 1,5 м/с требуемая мощность превышает 53 кВт.
В рамках принятой постановки модельной задачи оценки энергозатрат машина представляется системой трех твердых тел (рис. 2): корпуса и двух стоп, соединенных друг с другом безынерционными обратимыми механизмами и приводимых в движение одним двигателем, что соответствует кинематической схеме шагающей машины «Восьминог» с одностепенными движителями, и не может быть распространена на общий случай движителей с большим числом степеней подвижности и (или) с индивидуальными приводами. Рекуперация энергии происходит следующим образом. В той фазе цикла шага, когда требуется ускоренное движение переносимой стопы, вторая стопа, находящаяся в опоре, и корпус машины движутся замедленно. За счет инерции корпуса, момент на ведущем валу второго механизма шагания становится отрицательным, и при постоянстве момента, развиваемого двигателем, момент на ведущем валу первого механизма возрастает. Таким образом, перераспределение кинетической энергии осуществляется от корпуса к ускоренно движущемуся механизму шагания и, аналогично, в обратном направлении при замедлении механизма шагания. Следовательно, при соответствующем выборе параметров механизма шагания и управления можно добиться того, чтобы мощ- ность, развиваемая двигателем, оставалась постоянной и была минимальной.
При этом движение стоп относительно корпуса должно задаваться таким образом, чтобы в каждый момент времени одна из стоп находилась в опоре, а вторая в переносе – этим обеспечивается статическая устойчивость машины.
Уравнения движения рассматриваемой механической системы, имеющей один общий привод для механизмов шагания, находящихся в опорной фазе и фазе переноса, включают в себя дифференциальные уравнения движения тел, уравнения связей, устанавливающие зависимость между перемещением ведущего звена и перемещением корпуса машины и переносимого механизма шагания и уравнение двигателя при постоянной скорости выходного звена при действии постоянной силы сопротивления движению Q :
Mx1 - 21 — Q, mx2 - 22,
< x i - П i ( ф )- 0, x 2 — П 2 ( Ф ) - 0,
L - 2 , д П 1
1 d ф
-
2 2 П - 0; d Ф
где M , m
– масса корпуса машины и эквивалентная масса звеньев меха- низмов шагания, находящихся в фазе переноса, приведенная к опорной точке;
x1, x2 – абсолютные горизонтальные ко ординаты корпуса машины массы M и опорной точки переносимого механизма шагания массы m;
X , , X 2 - неопределенные множители
Лагранжа;

Рис. 1. Шагающая машина «Восьминог»
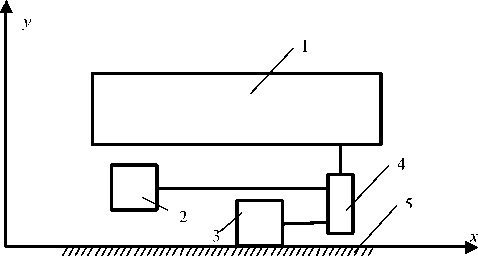
Рис. 2. Модельная схема поступательного движения шагающей машины:
1 – корпус; 2 – эквивалентный механизм шагания в фазе переноса; 3 – эквивалентный механизм шагания в фазе опоры;
4 – привод курсового движения; 5 – грунт
φ
П 1( ϕ ), П 2( ϕ )–
L
обобщенная координата приводного двигателя (например, угол поворота), при этом ф = го = const ;
передаточные функции, определяющие голономные стационарные связи между двигателем и рассматриваемыми телами;
генерируемая двигателем обобщенная сила (в рассматриваемом случае момент).
Полагая, что необратимые потери мощности W пропорциональны квадрату генерируемой обобщенной силы L , что, например, характерно для двигателей постоянного тока
W = αL 2, (2)
Тогда уравнения Эйлера имеют вид:
-
2 ( T + Q X i ) m 2 X 2 = М 2,
-
2 ( T + QXi ) m i X i - 2 Q ( T + Qx ) = щ.
При выполнении граничных условий
-
X2 (0) = X2 ( У 2 ) = 0, - x l C 0 ) = x i ( T 2 ) = -x iO , (9) где X i 0 — скорость шагающей машины в момент смены опорных точек механизмов шагания, входящих в движитель (в момент переступания).
22. _
При наложении граничных условий (9) следует µ 2 = 0 и µ 1 = –4 Q 2 S / τ .
Поэтому, где a - постоянный коэффициент пропорциональности.
T + Qx i = 0,
С учетом того, что
и остается одно содержательное уравнение
дП . . д П^ . .
Ф = xi,^2 Ф = x 2 , д ф д ф
T + Qx i = 2 QT = QV cp ,
после преобразований уравнений (1) имеет место уравнение
L(p = T + Qx i .
Для того чтобы минимизировать потери энергии, необходимо обеспечить минимум функционала
которое при Q = 0 сводится к известному ранее результату6 T = 0, , где V cp - средняя скорость движения шагающей машины.
Если задать требование минимальности и постоянства модуля ускорения корпуса машины, то получается равноускоренный закон его движения
τ 2 τ 2
A = a J L 2 dt = 0 2 J ( T + QXi ) 2 dt , (5)
0 Ф 0
x i = i
τ
X i0 — at , 0 < t < —,
t [ xiл — a— + a t i0 4 I
T 1 T
τ
—
- ,-< t < -.
4 ) 4 2
при учете дополнительных условий
τ 2 τ 2
J X i dt = S , J X 2 dt = 2 S , (6)
где S – длина шага механизма шагания;
τ – период движения.
С учетом (6) функционал (5) можно рассматривать как
Дальнейший анализ удобно производить в безразмерных параметрах и достаточно рассмотреть движение при 0 < t < у» . Зависи- ττ 4
мость X 2 = X 2 ( t ) при 4 < t < 2 будет симметрична относительно оси t = T 4.
Методами теории подобия вводятся следующие безразмерные критерии:
T 2 Г . 2 1
J = J ( T + Qx i ) + M i x + М 2 x2 dt , (7)
0 L J
где µ 1, µ 2 – неопределенные множители Лагранжа.
Q q = Mda — безразмерная сила сопротивления;
9 = -ta x10
– безразмерное время;
W =---ю - угол поворота ведущего звена ме-a ханизма шагания (для шагающей машины «Восьминог» угол поворота кривошипа), при котором, двигаясь равнозамедленно с ускорением а, шагающая машина останавливается; ю = ф угловая скорость ведущего кривошипа механизма шагания.
_ Х2
v2 = ~ - безразмерная скорость опоры ме- x10
ханизма шагания в фазе переноса.
Тогда из (11), с учетом (12), следует
4 ψ
V 2 = в ( q - 1 ) 9 2 + 2 [ 1 - 4 П >. (13)
Так как квадрат безразмерной скорости опоры механизма шагания ν 2 2 должен быть больше нуля, то имеют место ограничения, накладываемые на безразмерные параметры q и ψ .
Учитывая, что
ππ
0 < 9 < —; w >—,
2 ψ 4 ,
то имеется одно содержательное условие
1 - qn > 0, 4 ψ
или в физических переменных где R
Q < —MRm 2 , (16)
π условный приведенный радиус механизма шагания (радиус колеса эквивалентного по кинематическим характеристикам данному механизму шагания), определяемый из соотношения
X 10 = R to . (17)
Окончательно определяется требуемый закон переноса механизма шагания в относительном движении x 2 r = x 2 - x 1 = П2( ф ) - П 1 ( ф ) относительно корпуса машины как разность абсолютных движений опорной точки переносимого механизма шагания и центра масс корпуса машины.
При учете силы сопротивления, зависящей от скорости, дифференциальные уравнения движения отличаются от (1) и имеют вид
Mx1 = 21 - Q(Ху), mx2 = 22, x1 = П1 (Ф), x2 = П2 (Ф),
L - 2 , д П - 2 2 ®2 = 0.
1 d ф dф
Как и в предыдущих случаях, имея в виду, что ф = to = const, требуется минимизировать функционал (7) при выполнении изопериметричеcких условий (6).
Тогда уравнения Эйлера имеют вид:
2\t + dQdtr x ' + Q ( x 1) 8 1 ] Mx 1 - 2 Г t + Q (1 x 1 ) x j[ Q (1 x 1 )' ' Qx 1 ) 1 x 1 ]= ^ 1 ,
Гт T d Q ( x >-^n r-v]
21 T + d ' x 1 + Q ( x 1 ) x 1 mx 2 = ^ 2 .
Из граничных условий (9) и анализа второго уравнения (19) следует ц 2 = 0, и тогда первое уравнение (19) имеет вид:
2 Г T + Q ( x ) x ] Q ( x ) +d Q ( x 1. x о x 1
= ^ 1 -(20)
Дифференциальное уравнение (20) можно проинтегрировать, если задаться видом функции Q ( \ '|) . Например, для Q (, \ '|) = kx ^ , где k – коэффициент пропорциональности. В этом случае (20) сводится к виду:
- 2 Г T + kx 2 ^| [ 2 kx 1 ] = ^ 1.
При интегрировании данного дифференциального уравнения с учетом следствия из (19):
T + dQ ( x1 , x 1) x + Q ( ^cx , x 1 ) x = d Г T1 + Q ( ^^1 , x 1 ) ^^1 ] = 0, (22)
_ dt J dr- получается
T + Q ( x 1 ) x 1 = const = T 0 + Q (- x 10 ) - x 10 =- Mx 10 a + kx 20 . (23)
Уравнение (21), таким образом, решить невозможно, так как произведение в левой части должно быть константой ввиду того, что в данной изопериметрической задаче множи- тель Лагранжа ц1 - константа, а "1 - при выбранном законе движения корпуса константой не является. Однако минимум энергозатрат можно определить, задавшись требованием равнопеременного движения корпуса машины, аналогичным следствию (12) системы уравнений (8). В таком случае в исследуемом функционале остается один неопределенный множитель Лагранжа, а в системе (19) – одно второе уравнение, которое дает первый интеграл:
- т + dQ( " 1 ) "^ 1 + Q ("^ 1 ) " ]= d - т + Q (о " 1 ]= 0 ^ т + Q ( " ) " 1 = const . (24)
Причем коэффициент из правой части уравнения (24) может быть определен, как и ранее, из наложения первого из изопериметрических условий (6), как средняя мощность сил сопротивления за период:
τ 2 τ 2 τ 2 τ 2 τ
J - T + Q ( " ) с ] dt = J Cdt / J Tdt + J Q ( " ) " 1 dt = C |. (25) 0 0 00 2
Учитывая, что в силу (9) изменение кинетической энергии за период равно нулю, и задавшись линейной зависимостью силы сопротивления от скорости, получаем, переходя к безразмерным параметрам:
T 2 r ^ ( 2 ^ ) 2 n ( 2 ^ ) f n ^ 2
J k5 c 2 dt = k"2 J ( 1 - 9 j d 9 + J 1 1 + 9 I dt
0 0 0 V 2 v )
T
= C 2 ,(26)
откуда после соответствующих преобразований получаем:
C = 4 k " 120 , τ
1 + 2 n
r 1 1 )
—
I w2 V J_
.
Окончательно, для данного случая, также как и для случая постоянной силы сопротивления движению, при подстановке (27) в следствие из уравнения (24) может быть определен требуемый закон переноса опорной точки механизма шагания в относительном движении при различных значениях коэффициента пропорциональности линейной зависимости силы сопротивления от скорости.
Полученные результаты позволяют определять кинематическую характеристику циклового механизма шагания, который будет обеспечивать минимум энергозатрат при движении.
Список литературы Методы построения энергетически оптимальных алгоритмов движения шагающих машин
- Работа выполнена при поддержке Российского фонда фундаментальных исследований (проект № 09-08-97016).
- Лапшин В. В. Модельные оценки энерго-затрат шагающего аппарата//Известия АН СССР. МТТ. -1993. -№ 1. -С. 38-43.
- Динамика и управление движением шагающих машин с цикловыми движителями/Е. С. Брис-кин [и др.] -М.: Машиностроение, 2009. -С. 105-107.
- Об управлении движением шагающих машин с цикловыми движителями/Е. С. Брискин [и др.]//Экстремальная робототехника. -СПб., 2008. -Т. 5. -С. 67-71.
- Охоцимский Д. Е., Платонов А. К., Лап-шин В. В. Об одном способе рекуперации энергии при движении шагающего аппарата//Известия АН СССР. МТТ. -1986. -№ 5. -С. 39-45.
- Охоцимский Д. Е., Голубев Ю. Ф. Механика и управление движением автоматического шагающего аппарата. -М.: Наука, 1984. -С. 290-296.
