Минимизация энергетических затрат в задаче оптимальной переориентации твердого тела в сопротивляющейся среде

Автор: Стрелкова Н.А.
Журнал: Вестник Пермского университета. Математика. Механика. Информатика @vestnik-psu-mmi
Рубрика: Механика. Математическое моделирование
Статья в выпуске: 3 (38), 2017 года.
Бесплатный доступ
Исследуется задача оптимального управления переориентацией сферически симметрично-го твердого тела в сопротивляющейся среде, при условии, что вектор управляющего внеш-него момента ограничен по модулю. В качестве минимизируемого функционала использу-ется функционал энергетических затрат. Для решения задачи применяются теория кватер-нионов и принцип максимума Л.С. Понтрягина.
Оптимальное управление, переориентация твердого тела, сопротив-ляющаяся среда, минимум энергетических затрат, принцип максимума понтрягина
Короткий адрес: https://sciup.org/14730121
IDR: 14730121 | УДК: 62-50 | DOI: 10.17072/1993-0550-2017-3-72-76
Energy expenditure minimizing in the problem of a rigid body optimal reorientation in a resisting medium
The paper investigates the problem of the optimal control over reorientation of a spherically symmetric rigid body in a resisting medium providing that the controlling external moment vec-tor is module-limited. Energy expenditure functional is used as minimizing functional. The qua-ternion theory and Pontryagin’s maximum principle are applied to solve the problem.
Текст научной статьи Минимизация энергетических затрат в задаче оптимальной переориентации твердого тела в сопротивляющейся среде
-
1. Постановка задачи
Уравнения управляемого углового движения твердого тела, обладающего сферической симметрией, имеют вид [1]
2X = X ° и,
I со = u - k и,
где X = ( A 0 , A 1 , A 2 , A 3 ) - кватернион, компонентами которого являются параметры Род-рига-Гамильтона A i , ° - символ кватернионного произведения, 1 1 = 1 2 = 1 3 = I -главные центральные моменты инерции тела, о = ( ю 1 , ю 2 , ю 3 ) - вектор угловой скорости, u = ( и 1 , u 2 , и 3 ) - вектор управляющего момента, ωi , ui – проекции соответственно ω и u на главные центральные оси инерции, k – коэффициент аэродинамического момента сопротивления вращению тела.
Начальное положение твердого тела задается равенствами
X ( 0 ) = X o = ( A M, A 10 , A 20 , А зо ) , и ( 0 ) = 0. (2)
В конечный момент времени T связанная с твердым телом и опорная системы координат совпадают
X ( T ) = X T = ( ± 1,0,0,0 ) , и ( т ) = 0. (3)
На величину управляющего момента наложено ограничение и 1 + и 2 + и 3 < и 0 , (4)
где и 0 = const > 0.
Требуется найти управляющие функции ui ( t ) ( i = 1,2,3 ), удовлетворяющие ограничению (4), переводящие твердое тело из начального положения (2) в конечное (3) и доставляющие минимум функционалу энергетических затрат:
1 T
J = —^(и 2 + и 2 + и 3 2 dt , (5)
2 0 3
где время перехода T задано.
В данной постановке задача рассматривалась при k _ 0 в работе [1].
2. Построение оптимального решения
u* _ uZ 1 + uZ 2 + uZ 3 ,
преобразуем соотношения (12), (13) к виду
x + kx _ u *, |u*|< 1.
Введем лам:
новые переменные по форму-
t _ —t', u0
И _ .. — и',
u = u 0u ' ,
k _ ^lu 0 k ',
T _ — T ', J _,/ /u 0 ' J '.
u 0
В дальнейшем все исследования будем проводить в штрихованных переменных, однако штрихи для упрощения записи опустим. После замены (6) получаем
Преобразуем функционал (5), используя формулы (7), (9), (15):
1 T
J _ —J (u + u^ + u- )dt _
1 T 2 2 2
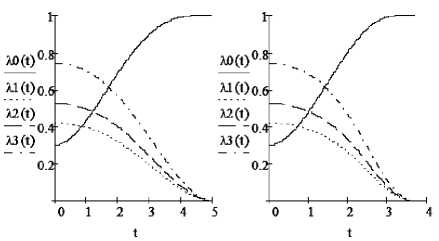
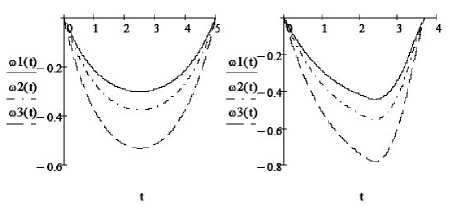
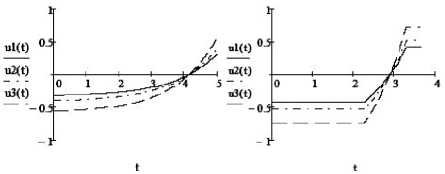
_] [( ^"l [(xZ +kxZ )2+(xZ +kxZ )2+(xZ +kxZ )2 ]dt_ 2X _ X ° и, ю _ u — kи, u 1 + u 2 + u 3 < 1. TT _ - ju*2 (z2 + Z2 + Z3)dt _ - ju*2dt. 20 20 Тогда функционал (5) примет вид J _1Tu*2 dt. Вид граничных условий (2), (3) и функционала (5) останется прежним. Решение задачи будем искать в классе плоских поворотов, при которых вектор угловой скорости ω сохраняет постоянное направление в пространстве. Тогда вектор угловой скорости может быть представлен в виде Для объекта, описываемого дифференциальным уравнением (15), в работе [3] найдено оптимальное управление, обеспечивающее перевод фазовой точки из начального состояния x(о) _ x0> 0, x(0) _ 0 в конечное положение x(T) _ xc(T) _ 0 и доставляющее минимум й( t ) = x (t )z, где Z = Z1Z2Z3) - постоянный единичный вектор, направленный по оси вращения, x – величина угла поворота. Общее решение кинематических уравнений системы (7) при постоянном по направлению векторе угловой скорости имеет вид [2] функционалу (16). А именно, 2 — 2ch kT + kT sh kT x0 " k2 (ch kT — 1) ' x _ 1 — ch kT + ch kt — ch k (T — t) 2 — 2ch kT + kT sh kT k (T — t )sh kT + 2 — 2ch kT + kT sh kTX0, x о + при 1t X(t) _ c ° exp — [ ю(t')dt', * u _ k2 be — J kT) eh— sh kT 2 — 2ch kT + kT sh kT x0, где c – постоянный кватернион. Из системы уравнений (7) следует: 2X _ i° ю + X ° u — k X ° ю. (11) Подставим в уравнение (11) соотношения (9) и (10). Учитывая, что Z ° Z _—1, получаем при J k3x02 shkT min 2(2 — 2ch kT + kT sh kT); x + kx _ uZ1 + uZ2 + u3Z3. Из ограничения (8) вытекает IuZ1 + uZ2 + u-з| < 1. Полагая 2 — 2chkT + kTshkT 2, (, k -----—,--------г----< x0< — lnl ch—T I: k2(ch kT — 1) 0k2I 2 J 1 „ - kt 1 - e t 2--7 + xo, 0 < t < *i, kk f1 e -kt -11Z, 0 < t < T1, < k k J x = < d 1 e kt + ekt Δ , л-t+ d2, Ti< t< T2,(20) k2Δ1 kΔ1 w = ^ k(T- t >-l + — T 2 ^ t< T, * u =< -1, 0 < t< Ti, 2ekt - 4 , , ----7^2, Ti < t < T2, Δ1 1 2 + 1, T 2 < t< T, J min = 1 (t1+ T - T 2 )-ТУ" +A (t 2 - Ti b (22) 2 kΔ1 2Δ1 - kde kt I (k ekt +-- kΔ1 e-1 - Δ2 k4 J Z, T< t< T2, (26) Z, T 2 < t< T. Из соотношений (7), (25), (26) определим вектор управляющего момента. „ 2 - 2ch kT + kT sh kT ПРИ x° < k 2 (ch kT - 1) : U = k 2 Q - e-kT )ek - sh kT;, 2 - 2ch kT + kT sh kT где при A1= ekT2- ekT1, A 2= ekT2+ ekT1, 2 - 2chkT + kTshkT 2, (, k 4 -----—,--------г----< x0 < — Ini ch—T I: k2 (ch kT -1) 0 k2 I 2 J d 1 = e2 kT1 + A1 k2A1 , d 2 = T1(A 2 A1) ,, + Xf) + kA12 [- Z, 0 < t< T1, u = ( а моменты τ1, τ2переключения управления определяются из следующей системы трансцендентных уравнений: 2 x0 kτ2 kτ1 + 2 + T = 2 k^e--- 'e ekT2- ek , ekT 2+ ekT1 = ekT +1. 12t I 4 - 42IZ, T1 < t< T2, 4 J , Z, t2< t< t. Используя соотношения (2), (9), (10), получаем решение кинематических уравнений системы (7): z = x - x0 где функция x = x (t) определяется равенствами (17), (20). Неизвестную постоянную x0 и компоненты единичного вектора ζ найдем из граничного условия (3), выбирая в формулах (19), (22) из двух значений функционала наименьшее. Тогда x 0 = 2arccos| 2001, (30) λi0 11 -20) λi0 11 - 200 если 200 > 0, если 200 < 0, i = 1,3. Покажем, что полученное решение (17), (19), (20), (22)–(31), определяющее плоский разворот твердого тела из начального положения (2) в конечное (3), удовлетворяет необходимым условиям принципа максимума Л.С. Понтрягина [4] для задачи оптимального управления (2), (3), (5), (7), (8). Так же, как и в работе [2], введем в рассмотрение кватернионы ψ и ϕ сопряженных переменных, в которых компоненты yi (i = 0,1, 2, 3), соответствуют параметрам Ai, а ^ (j = 1, 2, 3) - переменным a j. Введем обозначение p = vect(~ ° у) (32) p = P 0Z. (39) Тогда из (35), (37)–(39) следует, что при выполнении условия ф12+ ф2 + ф32< 1: = k2(1 — e~kT) e — sh kT , Ф = * 2 — 2chkT + kTshkTX0Z, 2k3 shkT x , (41) 2 — 2chkT + kTshkT0 и преобразуем функцию Гамильтона– Понтрягина к следующему виду: 13 2 H = тЕ(aiPi-2ka^i+2u^i+?оui). 2i=1 а при ф12+ фI + ф32 > 1: 2 ek^ — ект 2 — ek ф = kT kT Z ’ e 2 — e 1 P 0 = 2 k kτ ekτ2 kτ + e1 При ф0= 0 приходим к задаче оптимального по быстродействию управления переориентацией сферически симметричного твердого тела в сопротивляющейся среде, рассмотренной в работе [5]. Без ограничения общности положим ф0= — 1. Тогда kτ e2 — kτ e1 Здесь τ1, τ2, x0, ζ определяются из соотношений (24), (30), (31). Таким образом, для рассматриваемой задачи оптимального управления переориентацией сферически симметричного твердого тела в сопротивляющейся среде решение при H = эХ(aiPi— 2kaiVi+ 2иФ—и ). (33) 2 i =1 2arccos| A00< 2 — 2ch kT + kT sh kT k2 (ch kT — 1) Преобразуем функцию H : 13 2 2 H = ~^(aipi— 2kai^i—(ui— ф.)+Vi )■(34) 2i =1 описывается формулами (17), (19), (25), (27), (29)–(31); при Из соотношений (33), (34) следует, что функция H достигает максимума при 2 — 2ch kT + kT sh kT k2 (ch kT — 1) < 2arccos| A00| < U = 5 Ф, если ф2 + ф2 + ф3 < 1, ф 2 2 2 л (35) , если ф1 + ф2 + ^3 > 1. U ф1 < 4ln[ ch-T] k2I 2 J задается соотношениями (20), (22)–(24), (26), (28)–(31); при 2arccos λ00 Сопряженные уравнения для системы (7) имеют вид >-|ln (ch k-T ] k2I 2 J задача решения не имеет. 2y = у ° и, (36) Ф = kФ —2P. Из соотношений (29), (32), (36) получаем, что V = ^0 °P0Z° exP — x0 Пример Рассмотрим задачу оптимального управления переориентацией твердого тела из начального состояния X(0) = (0,3; 0,4; 0,5; 0,707), и(0) = 0 в конечное положение (3) при k = 0,8. Положим T = 5. В этом случае выполняется условие (44). Угол поворота твердого тела за время T равен x0= 2,532 рад., минимальное значение функционала энергетических затрат Jmin= 0,792. Примем T = 3,7. В этом случае выполняется условие (45). Моменты переключения управления соответственно равны τ1= 0,271, τ2= 3,312. Угол поворота твердого тела за время T равен остается прежним x0 = 2,532 рад., но при этом возрастают энергетические затраты Jmin = 1,511. Рис. 2. T = 3,7 Рис. 1. T = 5 Рис. 4. T = 3,7 Рис. 3. T = 5 Рис. 6. T = 3,7 Рис. 5. T = 5 Заключение

Список литературы Минимизация энергетических затрат в задаче оптимальной переориентации твердого тела в сопротивляющейся среде
- Молоденков А.В. Кватернионное решение задачи оптимального разворота твердого тела со сферическим распределением масс//Проблемы механики и управления: Нелинейные динамические системы: межвуз. сб. науч. тр. Пермь: Изд-во Перм. ун-та, 1995. Вып. 27. С. 122-131.
- Бранец В.Н., Шмыглевский И.П. Применение кватернионов в задачах ориентации твердого тела. М.: Наука, 1973. 320 с.
- Стрелкова Н.А. Об управлении одной системой второго порядка в сопротивляющейся среде//Вестник Пермского университета. Математика. Механика. Информатика. 2015. Вып. 3(30). С. 46-51.
- Понтрягин Л.С., Болтянский В.Г., Гамкрелидзе Р.В. и др. Математическая теория оптимальных процессов. М.: Наука, 1976. 392 с.
- Стрелкова Н.А. Оптимальная переориентация сферически симметричного твердого тела в сопротивляющейся среде//VI-е Поляховские чтения: Изб. тр. Междунар. науч. конф. по механике, Санкт-Петербург, 31 января-3 февраля 2012 г. М.: Изд. И.В. Балабанов, 2012. С. 75-79.
