Минимизация расхода топлива в задаче оптимального управления вращениями динамически симметричного твердого тела

Автор: Стрелкова Н.А.
Журнал: Вестник Пермского университета. Математика. Механика. Информатика @vestnik-psu-mmi
Рубрика: Механика. Математическое моделирование
Статья в выпуске: 3 (50), 2020 года.
Бесплатный доступ
Исследуется задача оптимального по расходу топлива управления гашением экваториальной составляющей угловой скорости динамически симметричного твердого тела. Для построения оптимального решения применяются принцип максимума Л.С. Понтрягина и метод усреднения. В аналитическом виде найдены угловые скорости, оптимальные управления в форме синтеза, минимальное значение расхода топлива. Приводятся иллюстрирующие примеры.
Вращение твердого тела, оптимальный расход топлива, принцип максимума понтрягина, метод усреднения
Короткий адрес: https://sciup.org/147245494
IDR: 147245494 | УДК: 62-50 | DOI: 10.17072/1993-0550-2020-3-79-84
Fuel minimization in the problem of optimal controlled rotations a dynamically symmetric rigid body
The paper studies the fuel-optimal control problem of damping the Equatorial component of the angular velocity of a dynamically symmetric solid. Pontryagin's maximum principle and the averaging method are applied to construct the optimal solution. The angular velocities, optimal control in the form of synthesis, and minimum value of fuel consumption are found in analytical form. Illustrative examples are provided.
Текст научной статьи Минимизация расхода топлива в задаче оптимального управления вращениями динамически симметричного твердого тела
1. Постановка задачи
Уравнения вращения динамически симметричного твердого тела под воздействием малых управляющих моментов в безразмерных переменных описываются системой уравнений [1 –3 ]:
® 1 + ( I - 1 ) ® 2 ® з = £ Щ , Щ ( 0 ) = Ш 0 ,
-
< Ш 2 - ( I - 1 ) ш 1 Ш 3 = £ U 2 , Ш 2 ( о ) = Ш 2 , (1)
I d ) 3 = £ U 3 , Ш 3 ( о ) = Ш 0 , £ << 1.
Здесь I = у3, J , J 3 ( J ^ J 3 ) - главные центральные моменты инерции твердого тела, Ш ( i = 1,2,3 ) – компоненты вектора угловой скорости, U i ( i = 1,2,3 ) – управляющие функции, £ е [ 0, £ 0 ] - малый параметр.
Рассматривается задача гашения экваториальной составляющей угловой скорости, в конечный момент времени t = T :
Ш 1 ( Т ) = Ш ( Т ) = о. (2)
Предполагается, что функция ш ( t ) является заданной функцией времени t , а управление изменением экваториальной составляющей угловой скорости осуществляется при помощи одного фиксированного в связанных с телом осях двигателя:
u 1 = u cos а , и 2 = u sin а , (3)
| и | < и 0, а = const. (4)
В работах [1, 2, 4] рассматривалась задача оптимального по быстродействию, а в работе [3] – оптимального по энергетическим затратам управления гашением экваториальной составляющей угловой скорости. В настоящей работе исследуется задача минимизации расхода топлива.
Требуется среди всех допустимых управлений и1 ( t ) , и2 ( t ) найти такие, для которых критерий оптимальности
T
J = £ J] u\dt , (5)
где время перехода T задано, принимает наименьшее возможное значение.
-
2. Применение принципа максимума
С помощью замены переменных щ = a cos m - b sin m, ю2 = a sin m + b cos m, t m = J(I -1)^(t)dr
первые два уравнения системы (1) и краевые условия преобразуем к следующему виду [1, 2]:
a = £ ( u , cos m + u7 sin m ) ,
L 1 • ,2 \(8)
b = £ ( - u 1 sin m + u 2 cos m ) ,
a(0) = щ0, b(0) = a%,(9)
a (T ) = b (T ) = 0.(10)
Для решения задачи (3)-(5), (7)-(10) воспользуемся принципом максимума Л.С. Понтрягина [5]. Функция Гамильтона-Понтрягина имеет вид принимающей
u *, u * опреде-
Используя соотношения (4), (7), (13), нетрудно убедиться в том, что выражение p cos p не может быть равным -1 или 1 на конечном промежутке времени. Таким образом, оптимальное управление u * является кусочно-постоянной функцией, значения 0, ± 1.
Управляющие функции ляются равенствами u * = u * cos a , u * = u * sin a .
-
3. Построение усредненной системы
Для построения приближенного решения рассматриваемой задачи оптимального управления воспользуемся методом усреднения [1, 2]. Подставим u **, u * в систему уравнений (8). Усредняя по фазе m правые части уравнений, получаем
H = - £ u | + pa £ U cos m + U 2 sin m ) + + pb£ ( - щ sin m + u 2 cos m ) .
Здесь pa , pb - переменные, сопряженные a , b . Так как функция H не зависит от a и b , то из сопряженной системы дифференциальных уравнений следует, что Ра , Р ь = const.
Подставим соотношения (3) в функцию Гамильтона-Понтрягина (11) и преобразуем полученное выражение:
H = -£u| + £upcos(m- а + y), (12) где cos y = pa-, sin y = pb-, Р = VP,2 + Pb. (13) pp
Из условия максимума функции Гамильтона-Понтрягина (12), учитывая ограничение (4), найдем оптимальное управление:
0, если p | cos p | < 1,
„ u 0 sign cos p , если p |cos p | > 1,
-
- u 0< u < 0, если p cos p = - 1,
0 < u < u0, если p cos p = 1, где p = m - a + Y.(15)
£2
a = — J u *( m - а + y ) cos ( m - a ) d m ,
* n 0
£ b =--J u *(m - a + y)sin(m - a)dm.
* n 0
Используя обозначение (15), вычислим инте- гралы:
2 п
Ju*(m - a + y)cos(m - a + y)dm = p1
= 4 J u ocos p dip = 4 u osin p j, (18)
2 n
Ju*(m - a + y)sin(m - a + y)dm =0, где p удовлетворяет равенству
1 p = arccos —.
p
Затем вычислим, используя соотношения (18), (19), интегралы в правых частях системы (17):
2 n
J u *( m - a + y ) cos ( m - a ) d m = 4 u 0 sin p 1 cos y ,
2 n
J u *( m - a + y ) sin ( m - a ) d m = 4 u 0 sin p sin y .
Тогда уравнения для усредненных фазовых переменных примут вид
2 u 0 sin ^
a = £----------cos y,
< n (20)
b = £ ^Ain^sin y .
П
*
u =5
0, если
cos V
cos V i
< 1,
u 0 sign cos v , если
cos V
cos V i
> 1.
Вычислим cos v . Из соотношений (23), (24)
следует, что
4. Построение и анализ оптимального решения
cos y = -
a
=, sin y = -’ + b2
b
+ b 2
.
Найдем решение системы дифференциальных уравнений (20), учитывая начальные условия (9):
Тогда, применяя равенства (15) и (6), получаем
2 u 0 sin v 0
a = £ ---------1 cos Y t + a x,
n
, 2 u 0 sin ^ . 0
b = £ ---------1 Sin Y t + a 2 .
П
cos v = cos (p - a + y) = a cos a + b sin a
- cos p
—
+ b 2
Из граничных условий (10) получаем, что
• na0
sin V i =------,
1 2 £ u0 T
- sin p
—
( 0 .
cos y =--г, sin y = -a0
a^
0 02 02
где a = (d1 + a2
.
Воспользуемся равенствами (22), (23) образуем выражения (21):
и пре-
01 t I
a = all--I,
1 I T J
b = (201 1 -
t
T
.
Используя выражения (6), (24), найдем угловые скорости ( ( t ) и a 2( t ) :
a1 =
( 1 cos p - a 2 sin p ) ,
a2 =
( 2 sin p + a 0 cos p ) ,
\
- b cos a + a sin a
J
\
+ b 2
J
t
(p = j(I -1)a3(r)dr.
Воспользуемся формулой (19) и преобразуем равенство (14) к виду
a 1 cos a + a 2 sin a
y] a + a2
.
Используя соотношения найдем оптимальное управление синтеза
(26),
* u
в
(27), форме
0,
если
a cos a + a2 sin a
I 2
yj a + a2 cos Vi
< 1,
*
u
—
u 0 sign ( a 1 cos a + a 2 sin a ) ,
если
a cos a + a2 sin a
I 2
yj a + a2 cos Vi
> 1.
Таким образом, оптимальное управление u * принимает, при выполнении неравен-
ства
a cos a + a2 sin a
/2 . 2
у/ a 1 + a 2 cos v 1
зависимости
от
a cos a + a sin a ; в
> 1, значения ± u0 в
знака
выражения
противном случае
–
u * = 0. Моменты времени, при которых происходит изменение режима оптимального
управления,
находятся
a cos a + a2 sin a
^ a 1 + a 2 cos v 1
из
условия
= 1, где значение cos V i
определяется из равенства (22).
Оптимальные управления u 2 , и 2 вычис ляются по формулам (16), в которые следует подставить управление и * из (28). Из соотношения (22) следует, что с увеличением заданного времени T окончания процесса увеличивается продолжительность времени вращательного движения твердого тела с выключенным двигателем ( и 2 = и 2 = 0).
В первом приближении минимальное значение функционала (5) равно
В этом случае оптимальный по расходу топлива режим совпадает с оптимальными по быстродействию и энергетическим затратам режимами гашения экваториальной составляющей угловой скорости, рассмотренными в работах [1-4]. При T = T расход топлива равен J *= г и0T = — ю0. При T < T рассматриваемая задача решения не имеет.
5. Примеры
T
J * = £ f(|u *1 d^ ’
- среднее значение управления
и * по фазе ^ за период 2 п ,
0, если
щ cos а + щ sin а
/ Г д/ щ + а2 cos^
< 1,
u 0 , если
щ cos а + щ sin а щ 2+ щ cos ^ 1
> 1.
Таким образом, построенные выражения для угловых скоростей щ , о2 из (25), функционала J * из (29), (30) и оптимальных управлений и 2 , и 2 из (16), (28) дают решение первого приближения поставленной задачи оптимального управления (1)-(5).
Интересно отметить, что в первом приближении изменение угловых скоростей щ , о2 осуществляется по такому же закону,
Рассмотрим задачу оптимального управления экваториальной составляющей угловой скорости твердого тела для тех же числовых данных, что и в работе [3]: щ ( 0 ) = 0,5, щ ( 0 ) = 0,5Л, щ 3 ( t ) = 0,08 1 , I = 2, г = 0,1, а = 30 ° , и 0 = 1.
Вычислим по формуле (31) момент окончания процесса T = 5 п (минимальное время, при котором еще возможен переход из заданного начального положения ( 0,5, 0,5д/3 ) в конечное ( 0,0 ) . В этом случае нетрудно найти, используя соотношения (23), (25), (32), точные значения точек переключения оптимального управления, и * является кусоч-
но-постоянной функцией: и = - 1 при
t е 0, 5.
при t е 5
и и =+ 1
5 п ; расход
что и в задаче минимизации энергетических затрат, рассмотренной в работе [3].
Рассмотрим предельный случай, когда
п
^ ч- (отсутствует пассивный участок вра-
топлива равен J * = 0,5 п .
На рис. 1 изображены графики, иллюстрирующие полученное решение.
щательного движения твердого тела при и *= 0). Тогда время T окончания процесса равно
T 1 = П^ . (31) 2 г и 0
При этом значении T функции щ (t), щ (t) имеют прежний вид (25), а управления и2 , и2 вычисляются по формулам (16), в которых и * равно и *=- и osign 01 cos а + ®2sin а). (32)
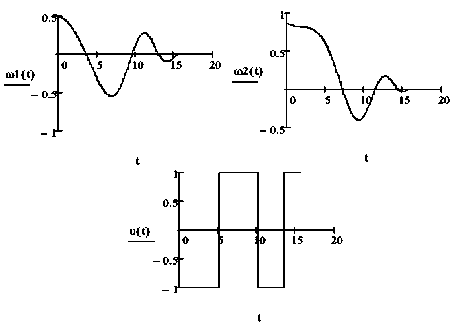
Рис. 1. T = 5 п
Положим T = 17. Для определения оптимального решения воспользуемся формулами (25), (28)–(30) и найдем угловые скорости, оптимальное управление, минимальный расход топлива.
На рис. 2 представлены графики зависимостей угловых скоростей щ, щ и управления и * от времени. Моменты переключения оптимального управления и * соответственно равны т1 = 4,046, т2 = 5,999, т3 = 9,742, т4 = 10,702 т5 = 13,170, т6 = 13,895, т7 = 15,874, т8 = 16,481.
Минимальное значение расхода топлива равно J * = 1,276.
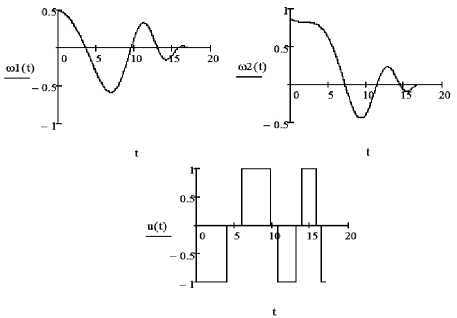
Рис. 2. T = 17
Примем T = 23. Для определения угловых скоростей, оптимального управления и расхода топлива воспользуемся соотношениями (25), (28)–(30).
В этом случае моменты переключения оптимального управления и * соответственно равны:
т1 = 2,389, т2 = 6,830, т3 = 9,178, т4 = 11,189, т5 = 12,759, т6 = 14,724, т7 = 15,535, т8 = 16,801, т9 = 17,875, т10 = 18,995, т11 = 19,960, т12 = 20,961, т13 = 21,839, т14 = 22,757.
Минимальное значение расхода топлива равно J * = 1,165.
Графики зависимостей угловых скоростей щ ( t ) , щ ( t ) и оптимального управления и *( t ) приведены на рис. 3.
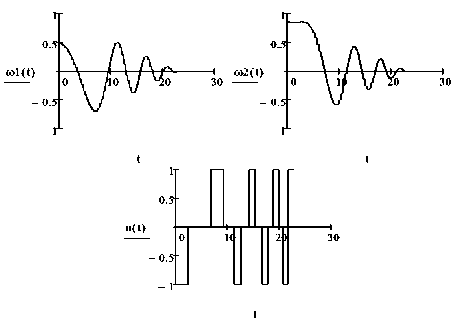
Рис. 3. T = 23
Заключение
В аналитическом виде построено приближенное решение рассматриваемой задачи оптимального управления.
Определены угловые скорости твердого тела, оптимальные управления в форме синтеза, моменты переключения управления, минимальное значение расхода топлива.
Указано условие, когда решение задачи не существует.
Представлены конкретные примеры построения оптимального решения при заданных граничных условиях.
Список литературы Минимизация расхода топлива в задаче оптимального управления вращениями динамически симметричного твердого тела
- Черноусько Ф.Л., Акуленко Л.Д., Соколов Б.Н. Управление колебаниями. М.: Наука, 1980. 384 с.
- Акуленко Л.Д. Асимптотические методы оптимального управления. М.: Наука, 1987. 368 с.
- Стрелкова Н.А., Агибалова О.С. К задаче об управляемых вращениях динамически симметричного твердого тела // Вестник Пермского университета. Математика. Механика. Информатика. 2018. Вып. 3(42). С. 89-94.
- Атанс М., Фалб П. Оптимальное управление. М.: Машиностроение, 1968. 764 с.
- Понтрягин Л.С., Болтянский В.Г., Гамкрелидзе Р.В., Мищенко Е.Ф. Математическая теория оптимальных процессов. М.: Наука, 1976. 392 с.
