Моделирование автономных электроприводов для сельскохозяйственной техники

Автор: Ломакин И.В., Оленин А.Г.
Статья в выпуске: 3 т.223, 2015 года.
Бесплатный доступ
В работе выполнен анализ технических характеристик трактора и проведен его тяговый расчет. На основании этого анализа принято решение о целесообразности использования существующего ДВС с генератором и четырьмя мотор-колесами. Исследование подсистемы внешних воздействий позволит сформулировать оптимальный алгоритм управления электроприводом. Это позволит отказаться от имеющейся трансмиссии, что повысит КПД привода в целом.В результате ожидается снижение потребляемой мощности от двигателя внутреннего сгорания и улучшение тяговых характеристик трактора.
Электропривод, трактор, бесконтактный двигатель постоянного тока, микроконтроллер
Короткий адрес: https://sciup.org/14288597
IDR: 14288597 | УДК: 62.83.681
Modeling of actuators for autonomous agricultural machinery
In work the analysis of the technical characteristics of the tractor and held his traction calculation. Based on this analysis, the decision about whether to use an existing internal combustion engine with a generator and four in-wheel motors. The study subsystem external influences allows to formulate the optimal control algorithm is electric. This will allow you to quit your current transmission, which will increase the efficiency of the actuator as a whole. The result is expected to reduce the power consumption of the internal combustion engine and the better traction of the tractor.
Текст научной статьи Моделирование автономных электроприводов для сельскохозяйственной техники
Широкое рекламирование разработок электромобилей и автомобилей с гибридным приводом умалчивает об их главной особенности – непригодности используемых аккумуляторных батарей при температурах ниже нуля. Это ограничивает их применение на внедорожниках и в сельскохозяйственной технике.
Целью работы является построение модели электропривода трактора и исследование возможности его применения при отсутствии станций подзарядки.
Материалы и методы. Анализ характеристик показывает, что трактор МТЗ-320 имеет достаточно высокий расход топлива. Это обусловлено использованием трансмиссии с большим количеством зубчатых передач и, как следствие, имеющий достаточно низкий КПД.
Учитывая требование автономности применения трактора в полевых условиях при отсутствии не только зарядных станций, но и обычных промышленных источников электроснабжения, предполагается рассмотреть возможность использования последовательного гибридного привода в котором двигатель внутреннего сгорания не имеет соединения с колесами, но служит в качестве генератора для зарядки батарей (рисунок 1).
Использование мотор-колес на основе бесколлекторных двигателей постоянного тока (БДПТ или BLDC) позволяет создавать достаточно эффективные транспортные средства. По сравнению с коллекторными двигателями БДПТ обладают возможностью стабилизации скорости движения трактора и преодоления препятствий на малых скоростях с максимальной мощностью двигателя за счет обратной связи с использованием датчика положения ротора. Для обеспечения требуемых динамических характеристик трактора необходимо поставить четыре мотора, имеющих мощность не менее 3 квт, при номинальной частоте вращения 760 об/мин и моменте не менее 105 Н м.
Эти двигатели должны обеспечивать работу в длительном режиме с моментом 2200 Н м при частоте вращения 3,5 об/мин. Максимальная мощность не менее 6 квт.
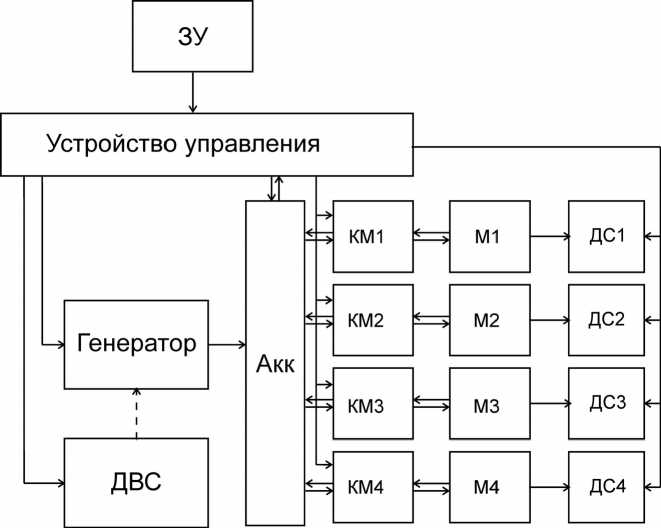
ЗУ – задающее устройство; Акк – аккумулятор электроэнергии; ДВС - двигатель внутреннего сгорания; КМ1 … КМ4 –коммутаторы двигателей; М1 … М4 –бесколлекторные двигатели постоянного тока; ДС1 … ДС4–датчики скорости
Рисунок 1 - Структурная схема тягового электропривода
Для обеспечения питания максимальной мощности. Привод электродвигателя необходимо использовать генератора можно осуществить от синхронный генератор на 25 КВт 96 В, дизельного двигателя мощностью который обеспечит работу двигателей на
Р двс = Р г / ^ Г = 25 / 0,85 = 29,4 кВт = 41 л.с
Этим условиям отвечает штатный двигатель внутреннего сгорания LDW 1603, имеющий мощность 40,6 л.с. при 3000 об/мин и крутящий момент 113 Н м при
1600 об/мин. Генератор предлагается монтировать вместо маховика.
Удаление трансмиссии и маховика позволит сократить массу трактора на 150 – 200 кг. Это позволит разместить генератор, четыре мотор – колеса и суперконденсаторы без значительного увеличения массы трактора.
Результаты исследований. Для исследования функционирования многодвигательного электропривода трактора построена его динамическую модель. Динамическая модель привода трактора состоит из четырех подсистем скоростных приводов колес, настроенных на симметричный оптимум, четырех подсистем расчета моментов сопротивления и объединяющей их системы электрического вала суммирующего моменты, приложенные к корпусу трактора.
F СЦ = k СЦ m k ∙ g ,
– масса приходящаяся на колесо электротрактора, кг;
где mk kСЦ – коэффициент сцепления.
Коэффициент сцепления зависит от вида покрытия дороги и от его состояния: наличие влаги, грязи, снега, льда. Величины коэффициента сцепления в на различных дорогах приведены в [1].
Уменьшение коэффициента сцепления колес с дорогой наблюдается также при увеличении скорости движения на сухой дороге с асфальтобетонным покрытием с 30 до 60 км/час, коэффициент сцепления уменьшается на 0,15. Поэтому
В основу построения подсистемы внешних воздействий положено моделирование математических зависимостей моментов сопротивления движению - момента силы трения качения колеси силы сопротивления подъему,момента силы сопротивления воздуха, момента силы сопротивления разгону.
Для того, чтобы электротрактор начал движение, сила тяги на ведущих колесах должна превысить сумму остальных сил – сил сопротивления движению. Однако если она превысит силу сцепления с дорогой, то начнется пробуксовка колес и дальнейшее увеличение силы тяги будет бессмысленно.
Сила сцепления с дорогой зависит от веса, приходящегося на колесо, от состояния покрытия дороги, давления воздуха в шинах и рисунка протектора.
силу сцепления с дорогой представим в виде
F СЦ = k СЦ (1-0,015 V ) m k ∙ g,
М тяги = F тяги r c .
При пробуксовке колес коэффициент сцепления уменьшается до величины коэффициента трения скольжения k СК , а, следовательно, и сила тяги уменьшится до величины силы трения скольжения.
Поэтому силу тяги на ведущих колесах можно представить формулой:
М , еслиF М { ДВ тяги СЦ k тяги = {М , если F >kn, (1-0,015 V) mk g ТР тяги СЦ k Рисунок 2 – Подсистема внешних воздействий Заключение. В процессе работы выполнен анализ технических характеристик трактора и проведен его тяговый расчет. На основании этого анализа принято решение о целесообразности использования существующего ДВС с генератором и четырьмя мотор-колесами. Исследование подсистемы внешних воздействий позволит сформулировать ЛИТЕРАТУРА: 1. Силы, действующие на ресурс]. URL: http://sdisle.com/ev/calc/forses.html. 2. Терехов, В.М. Системы управления электроприводов: Учеб.пособие для студ. высш. учеб. заведений / В.М. Терехов, О.И. Осипов; Под ред. В.М. Терехова. – М.: Издательский центр «Академия», 2005, 356 с. оптимальный алгоритм управления электроприводом. Это позволит отказаться от имеющейся трансмиссии, что повысит КПД привода в целом. В результате ожидается снижение потребляемой мощности от двигателя внутреннего сгорания и улучшение тяговых характеристик трактора. электромобиль (автомобиль) [Электронный МОДЕЛИРОВАНИЕ АВТОНОМНЫХ ЭЛЕКТРОПРИВОДОВ ДЛЯ СЕЛЬСКОХОЗЯЙСТВЕННОЙ ТЕХНИКИ Ломакин И.В., Оленин А.Г. Резюме В работе выполнен анализ технических характеристик трактора и проведен его тяговый расчет. На основании этого анализа принято решение о целесообразности использования существующего ДВС с генератором и четырьмя мотор-колесами. Исследование подсистемы внешних воздействий позволит сформулировать оптимальный алгоритм управления электроприводом. Это позволит отказаться от имеющейся трансмиссии, что повысит КПД привода в целом.В результате ожидается снижение потребляемой мощности от двигателя внутреннего сгорания и улучшение тяговых характеристик трактора. MODELING OF ACTUATORS FOR AUTONOMOUS AGRICULTURAL MACHINERY Lomakin I. W., Olenin A. G.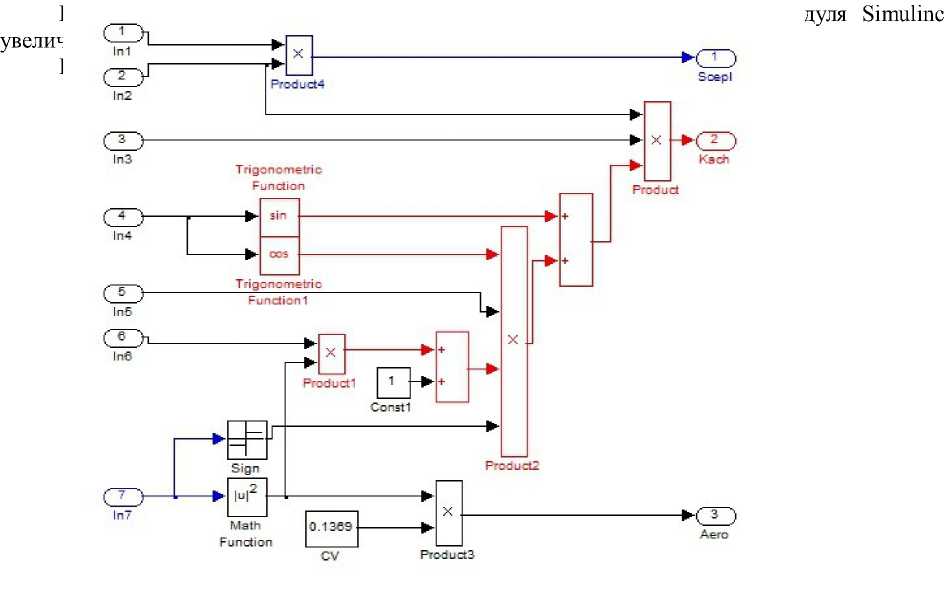
Список литературы Моделирование автономных электроприводов для сельскохозяйственной техники
- Силы, действующие на электромобиль (автомобиль) . URL: http://sdisle.com/ev/calc/forses.html. 2.
- Терехов, В.М. Системы управления электроприводов: Учеб.пособие для студ. высш. учеб. заведений/В.М. Терехов, О.И. Осипов; Под ред. В.М. Терехова. -М.: Издательский центр «Академия», 2005, 356 с.
