Моделирование водоохранных мероприятий в бассейне реки

Автор: Гурман Владимир Иосифович, Фесько Олесь Владимирович, Расина Ирина Викторовна
Журнал: Вестник Бурятского государственного университета. Математика, информатика @vestnik-bsu-maths
Рубрика: Управляемые системы и методы оптимизации
Статья в выпуске: 1, 2013 года.
Бесплатный доступ
Рассматривается оптимизация природоохранной деятельности в водосборном бассейне реки с использованием двухуровневой модели сетевой структуры и общих достаточных условий оптимальности как обобщения соответствующих условий для дискретно-непрерывных динамических систем.
Оптимальное управление, дискретно-непрерывная модель, водоохранные мероприятия
Короткий адрес: https://sciup.org/14835081
IDR: 14835081 | УДК: 517.97
Modeling and optimization of water protection measures in the river basin
The optimization of environmental activities in a river drainage basin using a two-level network model and general sufficient conditions of optimality is considered as a generalization of appropriate conditions for discrete-continuous dynamic systems.
Текст научной статьи Моделирование водоохранных мероприятий в бассейне реки
Речные бассейны – характерные объекты интенсивной антропогенной нагрузки. Одно из направлений снижения этой нагрузки состоит в регламентации хозяйственной деятельности посредством установления определенных норм и требований к количеству и качеству сточных вод от предприятий. Достаточно полное представление об этом дают монографии [1, 2].
Другое направление – регулярные природоохранные мероприятия по экологическому мониторингу и очистке скапливающихся загрязнений в водной среде и донных отложениях, бытового мусора, паразитической биоты и т.п. Такие мероприятия требуют больших затрат, поэтому актуальна задача их минимизации с использованием естественной самоочи-щающей способности природной среды.
Цель данной статьи – рассмотреть схематически эту задачу, которая не укладывается в традиционные постановки задач оптимального управления. Для этого строится двухуровневая модель дискретно-непрерывной системы (ДНС), на нижнем уровне которой описываются непрерывные распределения примесей вдоль русел рек, а на верхнем - фигурирует сеть операторов, отражающая структуру бассейна как системы рек. Понятие абстрактной сети операторов введено впервые в [3] вместе с общими достаточными условиями как обобщением таковых для дискретной динамической модели [4].
Использование двухуровневой модели дает возможность эффективно декомпозировать соответствующую задачу управления на «однородные» подзадачи так, чтобы применить известные методы для однородных непрерывных и дискретных систем, в данном случае методы, развитые в работах В.Ф. Кротова и его последователей [5-8].
-
1. Постановка задачи
Задача рассматривается в упрощенной постановке на примере условного речного бассейна: главная река с двумя притоками (рис. 1).
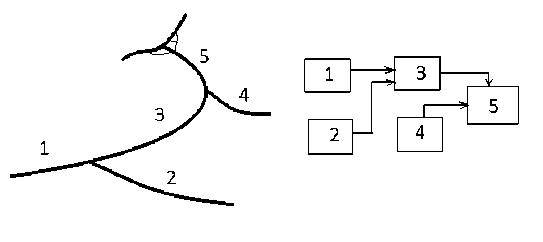
Рис. 1
Можно построить камерную модель этого бассейна, разделив его на 5 камер, как показано на рис. 1. В каждой камере распределение концентрации загрязнений вдоль русла описывается некоторой дифференциальной системой, которую примем линейной dp = A(t) Р + B(t) r + 5(t), t G [0, tF ], 0 < r < rmax, (1)
dt где t имеет смысл расстояния от начала соответствующей камеры, Р -вектора концентраций загрязнений, r - вектора интенсивностей природоохранных мероприятий, 5 - вектора потоков поступающих загрязнений. Здесь все величины имеют номер соответствующей камеры k = 1, ^, 5: tk, pk, ..., который для краткости опущен. Задача состоит в обеспечении допустимых концентраций в устьях рек, pk (tF) < pkmax, с минимумом суммарных затрат, определяемых величиной
-
5 t kF
Q = 2 q kF , q kF = J c k ( t ) r k ( t ) dt .
k = 1 0
Размерности векторов концентраций в разных камерах могут быть разными в зависимости от формы и размеров поперечного сечения русла, условий перемешивания и т.п.
Примем для простоты p и r одномерными, B = - 1, A , c , s - постоянными для каждой камеры. При естественном предположении p > 0 для любых управлений в указанных границах ограничение p ( tF ) < p max можно заменить штрафом и минимизировать взвешенную сумму
I = У I , I = ( в q„ + (1 - в ) p , J, 0 < в < 1. k k k kF k kF k
Для решения задачи построим соответствующую двухуровневую дискретно-непрерывную модель, на верхнем уровне которой фигурирует сеть операторов, которая, согласно [3], определяется следующим образом.
Пусть имеется N операторов произвольной природы f : X. х U ^ Y (у = f (к, х,»)). (2)
k k k k k kk nk
Вводятся подмножества X kq , такие, что П X kq = X k . Будем говорить, q = 1
что выход оператора l подается на вход оператора к , если для некоторого q имеет место равенство / ( к , q , xk ) = y l , где / ( к , q , xk ) - оператор проектирования на подмножество X kq .
Пусть рассматриваемые операторы соединены указанным образом по некоторой схеме, представляемой ориентированным графом (рис. 2). Предполагается, что для данного к между номерами q и l имеет место взаимно-однозначное соответствие. Иными словами, X к олицетворяет множество входов к -го оператора, занятых в соединениях, а U к - множество свободных входов.
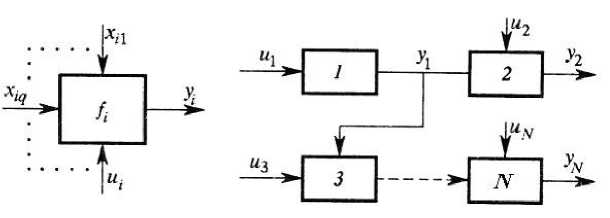
Рис. 2
В качестве общей модели двухуровневой управляемой системы предлагается следующая конкретизация указанной абстрактной модели. Представим условие (хк, ик) е В(к) в форме хк е Х(к), ик е U(к, хк), где Х(к) -проекция на Xк, U(к, хк) - сечение В(к) при данных к , хк. Пусть на некотором подмножестве K' с K = {1,.„,N} имеем u = (ud,mc), где ud -произвольной природы, а mc - некоторый непрерывный управляемый процесс, так что сечение множества U(k, x) при фиксированных x, ud есть допустимое множество Dc (k,x,ud) с соответствующей дифференциальной системой
c xc = Т = fc (z, t, x , u), te T(z), dt xc e Xc (z,t) с Rn(k), uc e Uc (z,t,xc) с Rp(k), z = (k,x,ud).
Оператор правой части (2) сводится к следующему:
Ук = f ( k , x , u ) = 6 ( z , Y ),
Y = ( t, , x c ,tF , x F ) e { Y : t, = t ( z ), x c = ^ ( z ), tF = S ( z ), x F еГ c ( z )}.
Решением этой комбинированной системы будем считать набор m = (x(k), u(k)) e D, где при k e K':
u ( k ) = ( ud ( k ), mc ( k )), mc e D c ( t , x ( k ), ud ( k )).
Задача оптимизации формулируется для верхнего уровня как задача о минимуме функционала
NNN
I = E I k ( Ук ) = E I k ( f ( k , x k , u k )) = E f 0 ( k , x k , u k ) 1 1 1
на множестве D наборов m = {(xk,uk)}, k = 1,.„,N, связанных указанны- ми соотношениями сети и возможными дополнительными ограничениями вида (xk, uk) e B(k), где B(k) - заданное при каждом k множество. Тре буется найти минимизирующую последовательность {ms} с D, т.е. такую, что I (ms) ^ inf I.
Для решения этой общей задачи вводится множество E элементов m , не связанных сетевыми условиями - равенствами х (k , j , xk ) = y: - на верхнем уровне и дифференциальными связями на нижнем.
Достаточные условия оптимальности для нее получаются по аналогии с динамическими дискретно-непрерывными процессами [9, 10].
Для номеров k e K' вводится дополнительно параметрическое семейство (с параметром z) гладких функций Y :Rm(k)+1 ^ R. Строится соот- ветствующая модификация обобщенного лагранжиана [9, 10]:
L=
E k \ K ‘ R k E R k , K ′
где
N
Rk = R (k, x, u) = E (Y( k, I, f (k, x, u)) - y( I, k, x( k, I, x))) - f0 (k, x, u), i=1
где y ( k , I , yk ), k , I = 1, ^ , N - произвольные функционалы, такие, что
Y(k, I, yk) ^ 0, если равенство x(k, j, xk) = yz отсутствует (отсутствует связь l ^ к).
R k = G ( z , Y ) + j ( R c ( z , t , x c ( z , t ), uc ( z , t )) - ^ ( z ) dt ,
T ( z )
N
G ( z , f ) = E H k , l , Ук ) - y ( l , k , x ( k , j , x k ) ) ) + l = 1
+ Y ( z , t i , x c ) - Y ( z , t F , x F ) + j u ( z , t ) dt - I k ( 0 ( z , Y ) ) , T ( z )
(\ T / \ I \ c c c1 cc c c c c z, t, x , u ) = Yx f ( z, t, x , u ) + Фt (z, t, x ),
Y ( z , t ) = sup { Rc : xc e X c ( z , t ), u e U c ( z , t , xc ) }, где yk = 0 ( z , Y ) при к e K ', yk = f ( к , x , u ) при к e K \ K' . Обозначим Y ( k ) = sup { G ( z , Y ) : Y еГ с ( z ) , x c e X c ( z , t i ), x F e X c ( z , tF ), ud e U d ( к ), x e X ( k )}.
Легко убедиться, что L ( m ) = I ( m ) при m e D , т.е. при выполнении отброшенных связей. Для этого рассмотрим вначале выражение для функции Rc . При выполнении дифференциальной связи в (3)
Rc (z, t, xc, uc ) = d^-. Тогда dt j Rcdt = j d^-dt = Y (z, tF, xF)- Y (z, ti, x|).
T ( z ) T ( z ) dt
С учетом этого, а также равенств х ( k , l , xk ) = y l (т.е. выполнения сетевых связей) получим
N
I R k = YY ( y ( k , I , Ук ) -Y ( I , k , У 1 ) ) +
K ‘ K ‘ l = 1
+ Y c ( z , t i , x | ) - Y ( z , t F , x F ) + j ^ c ( z , t ) dt - I k ( yk ) -
T ( z )
- Y c ( z , t i , x c ) + Y ( z , t F , x F ) - j ^ c ( z , t ) dt .
T ( z )
Тогда
N
I R k = ZZ Y ( k , l , Ук ) - Y ( l , k , У. ) ) - i k ( y k ).
K ‘ K ‘ l = 1
Окончательно имеем
L = - Zk\K' Rk - I Rk =
K '
NN
= - I ( y ( k , l , x ( l ) ) - y ( l , k , x ( k ) ) ) + I i k ( Ук ) = i . k , l = 1 к = 1
Отсюда непосредственно вытекает следующая теорема.
Теорема 1. Пусть имеются последовательность дискретно- непрерывных элементов {ms} с D и пара (ф,фс) такие, что:
-
1) ^ с ( z, t ) - кусочно-непрерывна при каждом z ;
-
2) R ( k , xs ( k ) , u s ( k ) ) ^ ^ ( k ) k g K \ K ‘ ;
-
3) j ( Rc ( Z s ( k ), t , x ^ ( k , t ) , us ( k , t ) ) - n ( Z s ( k ), t ) — ^ 0, k g K'; T ( Z s ( k ) )
-
4) G ( Z s ( k ), Y ( k ) ) - ц'( k ) ) ^ 0, k g K ‘ .
-
2. Решение задачи для бассейна реки
Тогда { m s } - минимизирующая последовательность I на D .
Представим рассматриваемую модель распространения загрязнений в бассейне реки как ДНС, на верхнем уровне которой находится сеть (дерево) операторов, а на нижнем - система из уравнения (1) и уравнения dq = cr, q(0) = 0, dt где cr имеет смысл природоохранных затрат на единицу длины соответствующей камеры (здесь номер k также не указан).
Положим при k = 1,2,4 (операторы только со свободными входами):
x k = ( x k , x2) = const, p (0) = Ph = x k 1 ;
при k = 3,5:
xk = ( xk 1 , xk 1 , xk 2 , xk 2 X pkI = xk 1 + xk 2 .
Сетевые связи выражаются следующим образом:
x 31 = У 1 , x 32 = У 2 , x 51 = У 3 , x 52 = У 4 .
Обозначим xc = (p, q)T, y = xc (tF), k = 1,. „, 5. Тогда рассматриваемая дифференциальная система и функционал Ik для каждой камеры запи шутся в виде
c
= Acxc + Bcuc + sc , 0 < uc = r g [0, p . ]. dt
I
I k C k x kF ,
Г—A 01 Г—11, „ .
где Ac = Bc = , sc = ( s ,0) T , C k = [ (1 - P k ) P k ] .
L0 0JL
Здесь
9 (z , Y ) = Ук = x№ , r c ( z ) = { Y c : t ki = 0, t kF = const, xkI = K kxk },
K k
1 0 1
1 0 1
, k = 3,5.
Оператор проектирования х (k , j , x ) x в данном случае - линейная функция: х ( k , j , x ) = ^ ( k , j ) x , ^ ( k , j ) — блочная матрица: Л ( к , 1) = [ E 0 ] , Л ( к ,2) = [ 0 E ] .
Функции ф и фс зададим линейными (с учетом линейности модели): ф ( к , l , У1 ) = V T ( k , l ) У1 ), Ф с ( k , t , x c ) = V ( к , t ) + V c T ( к , t ) x c .
Выпишем соответствующие выражения для G и R c , полагая ^ с = 0:
Rc = ycT (A (t)xc + Bc (t)uc + sc (t)) + уcTxc + Vc,
G = Z ( v T ( k , I ) xcff — V T ( l , k ) Л ( к , l ) x ) + l
+ V c T ( k ,0 ) K c x - V c T ( k , t kF ) xCf - C k x CF , n ( k , t ) = sup { Rc : uc e U c ( k , t ) } = 0.
Согласно рассматриваемому графу будем иметь 5 функций фc нижнего уровня по числу дифференциальных операторов и 4 ненулевые функции ф верхнего уровня, соответствующие имеющимся сетевым связям, т.е. все у ( к , l ) равны нулю, за исключением у ( 1,3 ) , у ( 2,3 ) , у ( 3,5 ) , V ( 4,5 ) .
Из условий максимума Rc по xc и uc , G по x kF и x и ^ = 0 получаем
V c = - sup { V c T ( Bc ( к , t ) uc + sc ) : uc e U c },
V c = - A T ( к , t) y c ( y c 1 =- A ( k , t) y c 1 , у c 2 = 0 ) ,
V (k, tF ) = ^V (k, l)-CkT, KT Vе (к, t, ) = £ AT( k, l '^y (l, k).
ll
Последнее равенство должно выполняться для операторов с занятыми входами (номера k = 3,5). Конкретно для ненулевых значений у ( k , l ) :
yc (1, t1 F ) = у (1,3) - C10T, yc (2,12F ) = у (2,3) - C0T,
yc (3,13f ) = у (3,5) - C0T, уc (4,14f ) = у (4,5) - C0T, уc (5,15f ) = -C0T, kTуc (3,131) = AT (3,1)y (1,3) + AT (3,2)y(2,3), (3)
K5Tуc (5,15f ) = AT (5,1)y (3,5) + AT (5,2)y (4,5), где Kk и AT(k, j) выписаны выше. После подстановки значений этих матриц получим у (1,3) = у (2,3) = (уc 1 (3,0), 0)T , у(3,5) = у(4,5) = (уc 1 (5,0), 0)T.
Из уравнений (3) получаем
V c 1 = V c ’ ( t kF ) eA ( t kF - t ) , V c ’ ( k ,0) = y c * ( t F ) eAtk F , yc 2 = const = - C 02T =- в с , где
Vе 1 ( 1 5 F ) = - (1 - в 5 ), vc 1 ( t kF ) = - (1 - в 5 ) e A 5 F - (1 - P k ), k = 3,4, " 1 ( t kF ) = - ((1 - £ 5 ) e A 5 F + (1 - A)) e A 3 F - (1 - P k ), k = 1,2.
В итоге получаются конкретные значения ^ ( k , l ) и зависимости t// c ( t ). Оптимальные управления находятся из условия Rc , которое, очевидно, сводится к следующему:
( v c 2 ( k , t ) C k - ^ 1 ( k , t ) ) r ^ max,
0SrSrk max т.е. управление будет кусочно-постоянным со значениями 0 либо rk max в зависимости от знака функции переключения t//c2(k, t)ck - ^ 1(k, t), которая, как видно, зависит от весов в. Последние подбираются так, чтобы для соответствующих распределений загрязнений по руслам выполнились заданные ограничения. При этом получаются следующие конкретные выражения для функций переключения Mk(tk):
M 5 ( t 5 ) = (1 - £ 5 ) e A ( t 5 F - t 5 ) - P s c 5,
Mk ( tk ) = (1 - P k ) eA ( t 5 F + t F - t k ) - p k c k , k = 3,4,
Mk ( tk ) = (1 - P k ) eA ( t 5 F + t 3 F + t kF - t k ) - P k c k , k = 1,2.
Были проведены расчеты для условного бассейна, близкого по характеристикам к нижней части бассейна р. Селенги – главного притока оз. Байкал. Данные для расчетов содержатся в таблице.
Таблица
|
№ |
tF |
A |
c , млн руб. км 4 /т |
s , т/км 4 |
pI , т/км 3 |
Г . max , т/км 4 |
|
1 |
20 |
2.5 х 10 - 3 |
4 х 10 2 |
0.5 х 10 - 2 |
0.4 |
0.6 х 10 " 2 |
|
2 |
30 |
3 х 10 - 3 |
10 3 |
0.2 х 10 - 2 |
0.3 х 10 " 1 |
0.25 х 10 " 2 |
|
3 |
30 |
2.5 х 10 - 3 |
7 х 10 2 |
0.3 х 10 - 2 |
- |
0.35 х 10 " 2 |
|
4 |
20 |
3 х 10 - 3 |
10 3 |
0.2 х 10 - 2 |
0.4 х 10 " 1 |
0.25 х 10 " 2 |
|
5 |
150 |
2.5 х 10 - 3 |
4 х 10 2 |
0.5 х 10 - 2 |
- |
0.6 х 10 " 2 |
Значения весов P k задавались равными: e k = в . В этом случае непосредственно видно, что всюду rk = 0, Q = 0 при в = 1, т.е. затраты отсутствуют, а загрязнение максимально, а при в = 0 rk = rk max, т.е. интенсивность очистки всюду максимальна. Результаты расчетов для промежуточных значений в представлены на рис. 4-6.
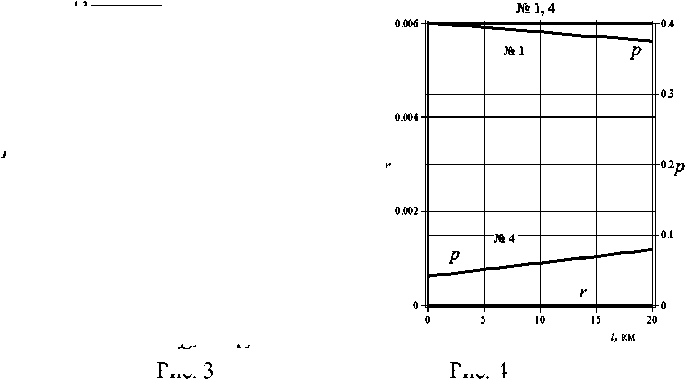
Рис. 3
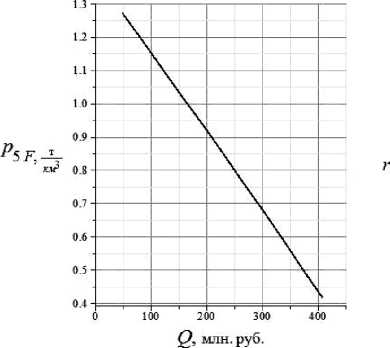
Рис. 4
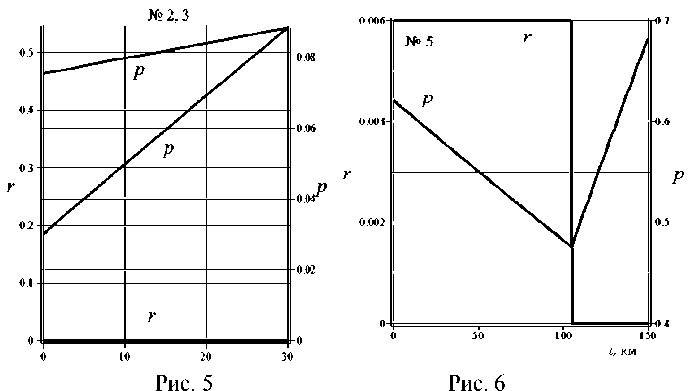
Зависимость p 5 F ( Q ) (рис. 3) служит для выбора варианта стратегии природоохранной деятельности с учетом располагаемых ресурсов.
На рис. 4–6 показаны распределения управляющих воздействий rk ( t ) и соответствующих концентраций загрязнений p ( t ) во всех камерах при заданном значении суммарных затрат Q = 300 млн руб. Видно характерное свойство оптимального решения при рассматриваемом критерии: экономия ресурсов производится в первую очередь за счет прекращения природоохранной деятельности на конечных участках бассейна (в данном случае – во всей камере 4 и на последних 45 километрах в камере 5), что по смыслу означает рациональное использование самоочищающей способности, представленной коэффициентом A .
Заключение
Описанная двухуровневая модель распространения примесей в бассейне реки на основе абстрактной сети операторов является новым шагом на пути иерархического представления систем неоднородной структуры – от чисто динамических к более общему классу систем сетевой структуры. Эта модель позволяет эффективно решать соответствующие сложные задачи оптимизации по принципу декомпозиции на однородные подсистемы и задачи, к которым применимы известные методы теории оптимального управления, ставшие уже классическими.
Упрощенное описание моделей нижнего уровня выбрано лишь для иллюстрации общего подхода; на самом деле он сохраняется и для значительно более сложных описаний, рассматриваемых при решении конкретных практических проблем, связанных с эффективным планированием водоохранных мероприятий как частью общей стратегии устойчивого развития соответствующей природной территории, например, такой как Байкальский регион.
Список литературы Моделирование водоохранных мероприятий в бассейне реки
- Константинов Г.Н. Нормирование воздействий на динамические системы. -Иркутск: Изд-во Иркут. ун-та, 1983.
- Математические модели и методы управления крупномасштабным водным объектом/А.Б. Анохин и др. -Новосибирск: Наука, 1987.
- Гурман В.И. Оптимизация дискретных систем: учеб. пособие. -Иркутск: Изд-во ИГУ, 1976.
- Кротов В.Ф. Достаточные условия оптимальности для дискретных управляемых систем//ДАН СССР. -1967. -Т. 172. № 1. -С. 18-21.
- Кротов В.Ф., Гурман В.И. Методы и задачи оптимального управления. -М.: Наука, 1973.
- Гурман В.И. Вырожденные задачи оптимального управления. -М.: Наука, 1977.
- Krotov V.F. Global Methods in Optimal Control Theory. -New York: Marcel Dekker, 1996.
- Гурман В.И. Принцип расширения в задачах управления. -М.: Наука, 1997.
- Расина И.В. Дискретно-непрерывные модели и оптимизация управляемых процессов//Программные системы: теория и приложения: электрон. науч. журн. ИПС РАН. -2011. -№ 5(9). -С. 49-72.
- Расина И.В. Итерационные алгоритмы оптимизации дискретнонепрерывных процессов//АиТ. -2012. -№ 10. -С. 3-15.
