Модификация алгоритма Узнадзе в аспекте кратковременной и долговременной памяти робота

Автор: Шарапов Ю.А.
Журнал: Вестник Пермского университета. Математика. Механика. Информатика @vestnik-psu-mmi
Рубрика: Механика. Математическое моделирование
Статья в выпуске: 1 (13), 2013 года.
Бесплатный доступ
Предлагается модификация алгоритма Узнадзе теории эмоциональных роботов: снимается требование постоянства и равенства коэффициентов кратковременной памяти, соответствующих конечному моменту времени каждой эмоции на всех воспитательных уровнях; добавляется учет долговременной памяти работа при расчете воспитания робота; вводится критерий перехода с одного воспитательного уровня на другой. В статье вводится понятие локального воспитания робота. Доказываются теоремы о сходимости воспитания робота на каждом воспитательном уровне и о достижимости любой поставленной цели воспитания G.
Робот, алгоритм узнадзе, кратковременная память робота, менная память робота
Короткий адрес: https://sciup.org/14729835
IDR: 14729835 | УДК: 519.688;
The modification of Uznadze's algorithm in terms of robot's long-term and short-term memory
The paper describes a modification of Uznadze's algorithm of the theory of emotional robots. The new algorithm abandons a requirement of constancy and equality of coefficients of robot's short-term memory during robot's educational process, uses coefficient of robot's long-term memory for calculation of robot's education. The paper introduces a criterion of change of educational levels and describes a concept of robot's local education. There are proofs of two theorems. One of them is about a convergence of series of robot's education on every educational level. Another is about an unlimitedness of robot's educational process and reachability of any robot's educational goals.
Текст научной статьи Модификация алгоритма Узнадзе в аспекте кратковременной и долговременной памяти робота
В работах [1, 2] предложены математические определения эмоции робота, воспитания и уровней воспитания, относительной невосприимчивости робота к воспитанию, основанные на гипотезе грузинского психолога Д.Н. Узнадзе [3–5], с учетом коэффициентов кратковременной памяти робота.
Определение 1 . Воспитанием робота R(t ) (воспитание робота во время действия эмоции) назовем функцию вида
R , ( t ) = r , (t ) + e , ( t ) R , _ 1 (t, ) , (1)
где t - текущее время, t > t, , 0 < ^ ( t ) < 1. Текущее время удовлетворяет соотношению t = t + ti , где t - текущее время действия настоящей эмоции от начала ее проявления, t – общее время действия всех предыдущих эмоций, R ; ( t ;) - воспитание, полученное роботом за время t .
В алгоритме Узнадзе в работе [1] введено допущение о равенстве и постоянстве
коэффициентов кратковременной памяти θ , соответствующих конечному моменту времени каждой эмоции, предложены определения уровня воспитания робота k и невосприимчивости робота к обучению (воспитанию) sk .
Отметим, что алгоритм многоуровневого воспитания робота, описанный в статье [1], не учитывает долговременную память робота.
Новая многоуровневая модель воспитания робота
Предложим новую многоуровневую модель воспитания робота, которая учитывает кратковременную и долговременную память робота.
Воспитание робота на конкретном уровне k ограничено пределом воспитания робота на k -ом воспитательном уровне U [ k ] . Переход на новый уровень воспитания происходит для "активизации" воспитания (обучения) робота. И так до тех пор, пока воспитание робота не достигнет «цели» воспитания G (рис. 1).
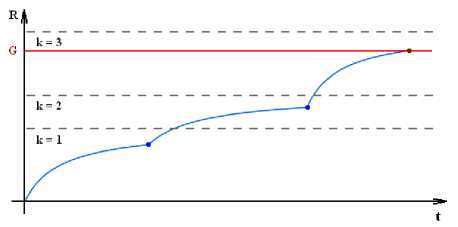
Рис. 1. Решение проблемы " пресыщения " воспитания робота
Следовательно, для равномерно забывчивого робота, который на каждом воспитательном уровне к обладает только равноценными положительными эмоциями, справедливы соотношения
R j Ч= £ И] ) m q1 к ] , m = 0
R jк ]
= q [ к ]
1 - ( #[ к ] ) j
1 - 0[к] .
Воспитание робота вычисляется по формуле (1) и зависит от начальных параметров, в т.ч. эмоций роботов. Легко видеть, что воспитание робота не зависит от цели воспитания G. В частном случае допустимо, что величина G будет меньше предела воспитания робота на 1-м воспитательном уровне U[1]. В общем случае это условие может не выпол- няться.
Смена набора эталонных эмоций (установок) дает возможность изменить начальные параметры формулы (1), и следовательно, определяет предел воспитания робота U [ k ] на воспитательном уровне с порядковым номером к .
Определение 2. Локальным воспитанием робота на уровне k назовем воспитание [ к ]
робота R j ( т ) , полученное на воспитательном уровне к без учета воспитания на предыдущих уровнях. j - номер воспитательного такта на уровне к.
Не нарушая общности, представим воспитательный процесс (1) на уровне к следующим образом:
; r о% )=r к](т)R^t) = r।к](т) + •< к](/)RS, j > 0
jj
[к где Rj (т) - локальное воспитание на уровне к при такте i, r.к] (т) - элементарное воспитание на уровне к для такта i, 0^к] (т) - ко- эффициент кратковременной памяти на уровне к для такта i.
Будем считать, что робот равномерно забывчив, т.е. справедлива цепочка равенств 0[к] = ^0к] (т) = ... = 0[„к] (т) = ... Пусть робот обладает только равноценными положитель- ными эмоциями на каждом воспитательном уровне к: q[к ] = r0[ к ] = .. = r^к ] = ...
Таким образом, воспитание робота Rj непрерывно и ограниченно, т.е. на языке теории эмоциональных роботов воспитание робота имеет пресыщение. Из соотношения (4) получаем предел воспитания робота на воспитательном уровне k при бесконечном уве- личении количества тактов j:
U [ к ] = l™ R j" ] = .
j^ 1 - £[ к ]
При переходе с одного уровня воспитания робота на другой наряду с коэффициентом кратковременной памяти 0[ к ] будем учитывать коэффициент долговременной памяти 0 ,[ к ] . Будем предполагать, что 0t [ к ] влияет на воспитание робота R [ . к - 1] , которое им было ik - 1
получено на всех предыдущих воспитательных уровнях, где i*k-1 - номер последнего так- та уровня k-1, на котором происходит переход на уровень k.
Таким образом, будем считать, что воспитание на каждом уровне и на каждом такте будет удовлетворять равенствам
R;"(' )=Rj'(') «й rJ к] (t )=r [к] (t)+0‘] (t)r,f-1], к > 1, ik-1
где R iк ] ( т ) - воспитание робота на уровне к [ к ]
при такте i , R j ( т ) - локальное воспитание на уровне к при такте j , 0^к ] ( t ) - коэффициент долговременной памяти на уровне k для такта i , 0 < 0 iк ] ( t ) < 1.
Взаимосвязь между i , номером воспитательного такта, и j , номером воспитательного такта на уровне k , можно представить следующей системой равенств:
i = j, к = 1
1- -.-* (7)
li = J + 1к-1, к > 1
Теорема 1. Если все коэффициенты долговременной памяти 0- k ] постоянны на каждом воспитательном уровне, то воспитание для каждого воспитательного уровня имеет предел.
Доказательство. Так как по условию теоремы справедлива цепочка равенств
0[ k ] = 0 0 k ] ( t ) = ... = 0 0k ] ( t ) = ... , то
C [ k ] = 0[ k ] R [ . k - 1] является константой для ка- i k - 1
ждого уровня k.
Следовательно, справедлива цепочка равенств
R [k ] (t) = R j] (t)+ 0k ] (t)R [*k-1] = ik-1
_ p [ k ] [ k ] p[k - 1] _ p[ k ] [ k ]
= R j ( t ) + 0 R, « = R j ( t ) + C .
Переходя в равенстве (8) к пределу при j ^ те и учитывая справедливость формулы q[ k ]
(5), получим lim R [ k ] =----- — + C[k ] .
j ^ i 1 - 0 L k ]
Таким образом, теорема доказана.
Введем критерий перехода воспитательного процесса с одного уровня на другой. Будем считать, что точка перехода с воспитательного уровня k на уровень k +1 достигается, когда изменение воспитания робота на воспитательном уровне k становится меньше некоторой величины 3 (рис. 2):
R [ k ] -Rlk ]
tg a = R i---- R^ = R [ k ] - R [ k ] < 3 . (9)
i - i + 1
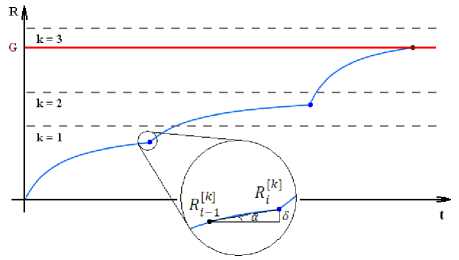
Рис. 2. Визуализация критерия воспитательного процесса с одного уровня на другой
Причем величина 3 не зависит от воспитательного уровня k .
Докажем следующую теорему.
Теорема 2 . При условиях теоремы 1 на каждом воспитательном уровне k существует такой такт i , для которого справедливо неравенство R [ k ] - R [ k ] | < 3 .
Доказательство. Так как ряд R [ k ] сходится, то верно следующее утверждение:
V 3 , Я n g N , V i > n : R [ k ] - R [ k ]1 1 < 3 .
Таким образом, теорема доказана.
На основе теоремы 2 можно сделать вывод, что на любом воспитательном уровне k найдется номер такта i , при котором произойдет переход на следующий воспитательный уровень и критерий, задаваемый формулой (9), выполняется для любого воспитательного уровня k . В свою очередь это означает, что воспитание робота при равноценных положительных эмоциях, постоянном коэффициенте долговременной и кратковременной памяти робота для каждого воспитательного уровня не ограничено сверху, а значит, может достигнуть любую "цель" воспитания G .
Исходя из вышеизложенного, можно предложить следующий алгоритм воспитательного процесса с учетом смены эталонных эмоций (установок) робота и коэффициентов кратковременной и долговременной памяти робота.
Шаг 1. Задаем эталонную эмоцию M [1] , i = 0 , j = 0 , k = 1 .
Шаг 2. Вычисляем элементарное воспитание Г [ k ] = J M [ k ] dt .
Шаг 3. Вычисляем воспитание робота R i "( t ) :
' R 0 k ] ( t ) = Л)
R [" ( t ) = r'k’ ( r ) +0 k ] ( t ) R ^, j > 0 jj
R‘n(> ) = R j 1] ( t ) ’
R1 k ] ( t ) = Ri k ] ( t ) + 0 k ] ( t ) R 4 - 1] , k > 1
i k - 1
где 3 [. k ] ( t ) и 0 ik ] ( t ) - кратковременная память и долговременная память на уровне k соответственно.
Шаг 4. Если R [ k ] ( t ) = G , то КОНЕЦ, в противном случае переходим к Шагу 5.
Шаг 5. Если выполняется критерий перехода на следующий уровень
|R ik ] - R ^j < 3 , то С = i , j = 0 , к = k + 1 . Переходим к Шагу 6.
Шаг 6 . j = j + 1 , i = j + i *_t и перейти к шагу 2.
Заключение
Таким образом, в настоящей статье приведены математические модели коэффициентов долговременной памяти робота и предложен алгоритм воспитательного процесса с учетом смены эталонных эмоций (установок) робота и коэффициентов кратковременной и долговременной памяти робота. В статье также описаны основные математические свойства сходимости, присущие воспитательному процессу роботов, и доказано, что любая вос- питательная цель, поставленная перед роботом, является достижимой.
Список литературы Модификация алгоритма Узнадзе в аспекте кратковременной и долговременной памяти робота
- Пенский О.Г., Черников К.В. Гипотеза о психических установках в аспекте математического моделирования процесса воспитания эмоциональных роботов//Фундаментальные исследования. 2012. № 3. С. 129-132.
- Пенский О.Г., Черников К. В. Основы математической теории эмоциональных роботов: моногр./Перм. гос. ун-т. Пермь, 2010. 256 с.
- Григолова В.В. Контрастная иллюзия, установка и бессознательное: моногр. Тбилиси, 1987.450с.
- Надирашвили Ш.А. Дмитрий Николаевич Узнадзе (к 100-летию со дня рождения). URL: http://www.voppsy.ru/issues/1986/866/866087. htm (дата обращения: 24.03.2011).
- Узнадзе Д.Н. Общая психология: учеб. для вузов. СПб,; Питер, 2004. 413 с.
