Монотонная сплайн-интерполяция класса C2 на основе однопараметрических групп диффеоморфизмов

Автор: Осадченко Н.В.
Журнал: Пространство, время и фундаментальные взаимодействия @stfi
Рубрика: Прикладная математика, математическое и компьютерное моделирование
Статья в выпуске: 3 (20), 2017 года.
Бесплатный доступ
В работе обсуждаются вопросы построения сплайн-интерполянтов класса 𝐶2, сохраняющих монотонность исходных данных, с использованием однопараметрических групп диффеоморфизмов единичного отрезка [ 0, 1]. Выбор локальных интерполянтов в виде суперпозиций диффеоморфизмов, принадлежащих определенным однопараметрическим группам, гарантирует для строго монотонных данных сохранение монотонности получаемым интерполянтом. Как и в случае кубических сплайнов, для обеспечения повышенной (класса 𝐶2) гладкости интерполянта достаточно потребовать, чтобы выполнялись условия непрерывности второй производной интерполянта во внутренних узлах заданной сетки. В работе для интерполянтов рассматриваемого типа получен явный вид соответствующих уравнений и предложен способ их численного решения. При этом для одной разновидности таких интерполянтов уравнения оказываются нелинейными, но их можно легко решить методом Ньютона; другая же разновидность обсуждаемых интерполянтов вообще не требует решения каких-либо уравнений: достаточно вычислить требуемые значения пер- вой производной во внутренних узлах, используя метод среднего гармонического (HMM). Проведенные вычисли- тельные эксперименты подтвердили эффективность предложенного подхода.
Монотонная интерполяция, сплайны, однопараметрические группы, уравнение шрёдера
Короткий адрес: https://sciup.org/142212731
IDR: 142212731 | УДК: 519.652,
C2 monotone spline interpolation based on one-parameter groups of diffeomorphism
This paper discusses the use of one-parameter groups consisting of the diffeomorphisms of the unit interval [0, 1] for constructing the 𝐶2 spline interpolants preserving the monotonicity of the given data sets. The choice of local interpolants in the form of superpositions of the diffeomorphisms belonging to definite one-parameter groups guarantees the monotonicity of the obtained interpolant for strictly monotone data. As in the case of cubic splines, for achieving the extra degree of smoothness (of 𝐶2 class) for the interpolant it must satisfy to conditions of the continuity for its second derivative at the inner knots of the grid used. The explicit form of the corresponding equations for the proposed interpolants is obtained, the method of its numerical solution is proposed. For one sort of these interpolants the equations are nonlinear, but one can easily solve them using the Newton's method; another sort of these interpolants does not require solving of any equations: the values of the first derivative at the inner knots are to be computed using the Harmonic Mean Method (HMM). The efficiency of the proposed approach is verified in a series of computational experiments
Текст научной статьи Монотонная сплайн-интерполяция класса C2 на основе однопараметрических групп диффеоморфизмов
В теории сплайн-интерполяции задачи формосохраняющей (или изогеометрической [1, с. 8]) интерполяции, в которых от интерполянта требуется, чтобы он обладал некоторыми геометрическими свойствами (положительность, монотонность, выпуклость и другое), присущими интерполируемой функции, считаются в настоящее время изученными достаточно хорошо [2] . Рассмотрим, в частности, задачу монотонной интерполяции .
Предполагается, что на отрезке [а, 6] числовой прямой R заданы функция /: [а, 6] ^ R и сетка Л из конечного числа узлов Х г : а = Х 0 < Х 1 < ... < Х ^ = b (так что указанный отрезок разбит на п отрезков разбиения [Х ^ , Х ^ +1 ], г = 0,..., п — 1), причем значения У = /(Х ^ ) функции / в узлах сетки известны. Требуется найти интерполянт — такую сплайн-функцию F , которая принимает в узлах сетки те же значения [3, с. 347–350, 390–391, 485].
Например, для кубических сплайнов их сужения на каждый отрезок разбиения ( звенья ) являются кубическими многочленами вида
F t (x) = а г + 6 г (х — Х г ) + с г (х — Х ; ) 2 + й г (х — Х г ) 3 ; (1)
коэффициенты звеньев не произвольны, а подчинены условиям непрерывности низших производных сплайна F во внутренних узлах сетки. Если в роли интерполянта F выступает кубический сплайн дефекта 1 (такие сплайны являются дифференцируемыми функциями класса С2, а образуемое ими векторное пространство далее, как и в [4], мы обозначаем Pg\), то непрерывными должны быть его первая и вторая производные; задание (наряду с условиями F(Xi) = У) двух граничных условий, налагаемых на сплайн в точках а и Ь, позволяет однозначно найти искомый интерполянт [3, с. 390—393]. Интерполяция здесь является нелокальной: значения коэффициентов сплайна зависят от всех значений У [5, с. 32].
Для кубических сплайнов дефекта 2 (они являются дифференцируемыми функциями класса С 1 и образуют [4] векторное пространство P 3X2 ) естественной является задача эрмитовой интерполяции — когда в узлах заданы также значения У ’ = / ‘ (Х г ), а от интерполянта, кроме выполнения условий F (Х г ) = Уг , требуют, чтобы значения его первой производной в узлах (называемые наклонами сплайна [3, с. 391]) были такими же: F ‘ (Х г ) = У/. Здесь уже интерполяция носит локальный характер и может быть проведена для каждого отрезка разбиения независимо [5, с. 25–26].
Теперь предположим, что интерполируемая функция / либо строго возрастает на отрезке [а, Ь], либо строго убывает:
V i У г +1 > Уг либо V i Уг+1 < Уг , (2) и надо обеспечить строгую монотонность интерполянта F ; это и есть задача монотонной интерполяции (точнее говоря, ее частный случай: строго монотонная интерполяция, когда все знаки неравенства являются строгими; как и в [4] , мы ограничиваемся здесь именно этим случаем).
Кубические сплайны обеспечивают сохранение формы далеко не всегда [1, с. 141–145, 151]. Заметим, что необходимые и достаточные условия монотонности для сплайнов из Р ^2 найдены Ф. Фричем и Р. Карлсоном в 1980 году (см. [6] ), а в работах В. Л. Мирошниченко 1984 и 1990 года (см. [7, 8] ) получены достаточные условия монотонности при интерполяции сплайнами из P3\; в 2001 году Ю. С. Волков получил, исходя из иного представления интерполяционного сплайна, другой вариант таких достаточных условий [9, 10] .
В этой ситуации были предложены различные подходы к решению возникшей проблемы. Фрич и Карлсон отказались от выполнения условий F ‘ (Х г ) = У ’ и предложили алгоритм локальной монотонной интерполяции класса С 1 кубическими сплайнами дефекта 2, в котором наклоны сплайна во внутренних узлах сетки выступают как свободные параметры, выбираемые так, чтобы обеспечить монотонность интерполянта. Развитием данного подхода стала интерполяция весовыми кубическими сплайнами [11] .
В основе другого направления исследований лежало обобщение конструкции кубических спланов, и на этом пути было предложено несколько типов обобщенных кубических сплайнов: рациональные, с дополнительными узлами, экспоненциальные, гиперболические и другие [12] . Наибольшее внимание привлекли рациональные сплайны, звенья которых — дроби с кубическим многочленом в числителе и многочленом 1-й или 2-й степени в знаменателе; здесь следует упомянуть работы [13 –15] , где рассматривались локальные схемы интерполяции и были построены сохраняющие монотонность эрмитовы ин-терполянты класса С 1 , и работы [ 16, 17] , где предложены нелокальные монотонные интерполянты класса С 2 (для их получения нужно — как и в случае кубических сплайнов дефекта 1 — решать систему линейных уравнений с трехдиагональной матрицей). Однако при интерполяции рациональными сплайнами возникает достаточно сложная проблема управления дополнительными свободными параметрами, характерными для такой интерполяции.
В статье [4] автором была предложена иная процедура эрмитовой сплайн-интерполяции класса С 1 , гарантирующая для строго монотонных данных строгую монотонность получаемого интерполянта. Здесь i-е звено искомого интерполянта F имеет вид
F (т) = У г + (У г +1 - У г ) F(s) , (3) где s = (т — Х г )/(Х г +1 — Х г ), а F — диффеоморфизм (заданной степени гладкости г) единичного отрезка I = [0, 1], сохраняющий ориентацию и являющийся суперпозицией диффеоморфизмов (функциональных сомножителей) из некоторых выбранных заранее однопараметрических групп.
′′
Выбор сомножителей должен обеспечить выполнение условий F г (0) = р г , F г (1) = д г (в задаче эрмитовой интерполяции р г = У//Д г и д г = У +1 / Д .^ , где Д г = (У +i —У г )/ (Х г +1 —Х г )). В [4] предпочтение было отдано суперпозициям типа «сэндвича»:
̂︀
~
F i = F g . о F 7 i о F g . ,
̂︀
где F g . — функциональный квадратный корень из функции F g . (то есть функция F g . = F ^^ ), а F g . и F 7i — элементы однопараметрических групп типа G a и G s соответственно, причем р г = ^ Р г /<1 г и
^ i = aJ p i q i — значения соответствующих параметров (мультипликативных). Для элементов групп типа G a и G s по определению имеют место соотношения
П (0) = (Зг , F^ (1) = 1/Д, (5)
F ^ (0) = F ^ (1) = ^ i , (6)
откуда и следует выполнение условий F i (0) = p i , F i (1) = q i .
Автор хотел бы отметить, что его интерес к интерполяции сплайнами наметился в 1990-е годы и стимулировался прежде всего их применениями к задачам построения программного движения манипуляционных роботов (см. [18 –20] ). Идея построения локального монотонного интерполянта как «сэндвича» из диффеоморфизмов, принадлежащих определенным однопараметрическим группам, оформилась к 2000 году; тогда же было решено использовать группы G 1 a (в [4] она обозначалась G a ), G 1 s и G 2 s (чуть позднее функции из этих групп нашли применение при решении некоторых задач управления движением механических систем [21 –23] ). Но законченный вид описанная в [4] процедура эрмитовой сплайн-интерполяции класса С 1 обрела в апреле—мае 2017 года.
Настоящая же работа посвящена интерполяции класса С 2 сплайнами вида ( 3) ,( 4 ) и отражает результаты исследований, проведtнных в июле–августе 2017 года.
-
2. Выбор групп диффеоморфизмов
Итак, рассмотрим для строго монотонной функции / интерполяционный сплайн F вида ( 3 ),( 4 ), но уже не требуем, чтобы его наклоны во внутренних узлах сетки совпадали со значениями ¥‘. Будем использовать для наклонов данного сплайна обозначение m i (именно так обычно обозначают наклоны кубических сплайнов [5, с. 31]).
Тогда для производных локального интерполянта F i на концах отрезка I имеем: p i = m i /A i и q i = m i +i /A i . Элементы F k однопараметрических групп диффеоморфизмов этого отрезка, то есть функции вида у = F k (ж), где к — параметр группы (мы сейчас временно обозначаем их аргумент ж, а не s), являются [4, 24] решениями соответствующего уравнения Шрёдера
Ф(у) = к Ф(ж), (7)
где Ф — функция Шрёдера (своя для каждой группы). На функцию Ф далее налагаем условия нормировки: Ф(0) = 0, Ф' (0) = 1 (нормированную таким образом функцию Шрёдера называют еще функцией Кёнигса [25, 26] ); в этом случае параметр к совпадает со значением производной функции F k при ж = 0.
Как уже отмечалось, среди однопараметрических групп диффеоморфизмов отрезка I в [4] выделялись группы типа G a и G s , элементы которых удовлетворяли соотношениям ( 5 ) и ( 6) соответственно. Однако приведенные в [4] конкретные примеры таких групп в действительности, как мы сейчас покажем, обладают более сильными свойствами симметрии.
Именно, наряду с группой Diff + ( I ) всех диффеоморфизмов единичного отрезка I , сохраняющих ориентацию, рассмотрим более широкую группу Diff т ( I ) диффеоморфизмов этого отрезка, включающую также и диффеоморфизмы, которые ориентацию не сохраняют. Простейшим примером последних служит функция l , определяемая равенством l (ж) = 1 — ж. Очевидно, l о l = id, где id — тождественное отображение отрезка I на себя, то есть функция у = ж; отсюда следует, что l -1 = l .
Заменив в уравнении Шрёдера ( 7 ) функцию Ф функцией Ф о L и решив полученное уравнение, приходим к новой функции F ^ из Diff + ( I ), связанной с исходной функцией F k соотношением F k = l о F k о l -1 (по терминологии, принятой в общей алгебре, отображение I L , определяемое для элементов д группы Diff r ( I ) формулой I t (y) = l о д о l -1 , называется внутренним автоморфизмом данной группы, порожденным ее элементом l , а элемент I t (g) — элементом, сопряженным к элементу д [27, с. 444, 454]; для группы Diff + ( I ), впрочем, I L является внешним автоморфизмом). Будучи автоморфизмом, отображение I L удовлетворяет тождеству I L (g 1 од 2 ) = I t (g 1 ) о I t (g 2 ).
Таким образом, F k (ж) = 1 — F k (1 — ж), откуда получаем следующие соотношения:
F k ' ( ж ) = F k (1 — ж ) , F k "( ж ) = — Fk (1 — ж ) . (8)
Теперь выпишем явные выражения для функций из групп G 1 a , G 1 s и G 2 s , указывая каждый раз вид соответствующей нормированной функции Шрёдера:
S is :
G 2s :
G a : F <*> = н/Ь
<ж <ж
, х ж
Ф( ж ) = 1 - ж;
ж- 1 /
2 2 V (?ж(1 - ж)) 2 + (ж - 1 / 2 ) 2 + 7ж(1 - ж)
,
ж (1 - ж)
Ф = 12
;
F'(ж) = 2 + 2 ^
ж - '2
, - ж) + (ж - 1 / 2 ) 2
Ф(ж)
ж (1 - ж) (1 - 2ж) 2 ’
здесь через /3 и 7 обозначены параметры групп.
Выполняя в каждом из этих трех случаях рассмотренный выше переход от функции Ф к функции Ф о L, убеждаемся, что для функций из данных групп справедливы тождества
Fp (ж) = Fp-(ж) = F 1/э (ж) и F° (ж) = F7 (ж);
выполнение данных тождеств означает, что для функций из группы G 1 a справедливо следующее свойство симметрии:
Fp(ж) = 1 - Fi/p (1 -ж), а для функций из групп G1s и G2s имеет место такое свойство:
F7(ж) = 1 - F7(1-ж).
В дальнейшем условимся называть группой типа G a любую однопараметрическую группу сохраняющих ориентацию диффеоморфизмов отрезка I , элементы которой обладают свойством ( 13 ), а группой типа G s — соответственно любую однопараметрическую группу, для элементов которой выполняется свойство ( 14 ). Соотношения же ( 5 ) и ( 6 ) оказываются при этом простыми следствиями свойств ( 13 ) и ( 14 ).
Обозначим через M77 и M ^2 ^ множества интерполянтов вида ( 3 ),( 4) , которые являются дифференцируемыми функциями класса Ст и построены по сетке Д для всевозможных наборов данных У 0 ,..., Уф, удовлетворяющих условиям ( 2 ), при выборе групп S a и S is (соответственно, S a и S 2S ) в качестве конкретных реализаций групп типа S a и S s . В случаях, когда конкретное значение т несущественно или ясно из контекста, соответствующий индекс будем опускать.
На практике важна также быстрота вычисления значений сплайна F . Если в случае кубических и рациональных сплайнов для этого используются лишь четыре основные арифметические операции, то в случае интерполянтов из множеств М ^ и М -7 добавляется еще операция извлечения квадратного корня (не требуется вычислять значения трансцендентных функций, как, например, в случае тригонометрических сплайнов [28, 29] ).
Расчетные формулы остаются достаточно простыми. Приведем фрагмент программы на языке Си, в котором реализуется вычисление значений сплайна из множества М 17 для текущего значения аргумента ж. Имеем:
N = beta * s, u=N/(1.0+N-s);
P = u - 0.5, Q = gamma *u*(1.0-u);
v=0.5+0.5*P/( sqrt(Q*Q+P*P) + Q );
N = beta * v, w=N/(1.0+N-v);
y = Y[i] + ( Y[i+1] - Y[i] ) * w;
Здесь предполагается, что заранее рассчитанные значения параметров 3 = V A и 7 ^ уже считаны из соответствующих массивов и вычислено текущее значение s.
Для сплайна из множества М 72 оператор в третьей строке приведенного фрагмента следует заменить таким:
v=0.5+0.5*P/ sqrt(Q+P*P);
-
3. Соотношения непрерывности
Получим для интерполяционного сплайна F вида ( 3 ),( 4) соотношения, при выполнении которых данный сплайн будет на отрезке [а, Ь] дифференцируемой функцией класса С 2 . Если для кубических сплайнов такие соотношения можно получить, приравнивая в каждом внутреннем узле Х г выражения для вторых производных звеньев F г -1 и F [3, с. 392], то нам будет удобнее оперировать производными от логарифмов первых производных звеньев искомого монотонного интерполянта. Иными словами, рассмотрим функции, определяемые соотношениями ′′ ′
-
8г(х) = Fк(х) /F' (х) и S^s) = F г (s) /F г (s). (15)
Поскольку
Fг (х) = Дг Fг (s) , Fг (х) = Дг Fг (s) / Кг, где Кг = Хг+1 — Хг, то получаем:
8 г (х) = 8 г (s) /К г .
Следовательно, условие 8 г- 1 (Х г ) = 8 г (Х г ) переходит в такое соотношение непрерывности:
8 г - 1 (1) К г = 8 г (0) К г - 1 . (16)
Поделив обе части равенства ( 16 ) на К г +К г- 1 , получаем иную форму данного соотношения:
А г 8 г - 1 (1) = М г 8 г (0) , (17)
где
А = К г = К г - 1
К г + К г - 1 , К г + К г - 1
С учетом формулы ( 4 ) для локального интерполянта имеем:
ВД = FPi (х), где х = F- (у) , х = FPi (s), откуда последовательно находим:
F г ( s ) = F ( х ) • F - ( х ) • F ( s ) ,
′′ ′′ 2 ′ 2 ′ ′ 2 ′ ′′
F г ( s ) = F ( х ) • F - (х) • F ( s ) + IF ( х ) • F 7 1 ( х ) • F . ( s ) + F/3 . ( х ) • F - ( х ) • F ^ ( s ) ;
в результате имеем:
S" = 8 . ( х ) • F - г ( х ) • F p % ( s ) + 8 - г ( х ) • F p % ( s ) + 8 р г ( s ) . (19)
Для подстановки в соотношение непрерывности ( 17 ) нужны значения правой части равенства ( 19 ) в точках 0 и 1. Чтобы найти эти значения, не обязательно вычислять в явном виде значения всех фигурирующих в данном равенстве функций при произвольном значении аргумента, поскольку быстрее приводят к нужному результату следующие рассуждения.
Разложения по Маклорену нормированной функции Шрёдера и обратной к ней функции имеют вид:
Ф(х) = х + к X + ... и Ф 1 (z) = z — к X + ... , (20)
где к = Ф"(0)/2. Поэтому для решения F ^ уравнения Шрёдера ( 7 ) мы имеем:
F k (х) = Ф — 1 (А' Ф(х)) = Ф - 1 ( кх + к к х 2 + . ..) = = (кх + к кх + .. .) — к ( кх + к кх + .. .) 2 + ... = (21)
= кх + к (1 — к) кх 2 + ... ;
почленное дифференцирование разложения ( 21 ) дает:
F к (х) = к + 2 к к (1 — к) х + ... , F к (х) = 2 к к (1 — к) + ...
и, следовательно,
F к (0) = к, F к (0) = 2 к к (1 — к), 8 к (0) = 2 к (1 — к). (22)
Для получения соответствующих формул при значении аргумента, равном 1, перейдем к сопряженной функции F k и воспользуемся соотношениями ( 8) ,( 12) . В случае группы типа G a получим:
F g (1) = 1/3, F g (1) = 2 к a (1 -/ 3 )/3 2 , S p (1) = 2 к a (1 - /3)//3, (23)
а в случае группы типа G s будем иметь:
F I (1) = 7, F ^ (1) = - 2 к s 7 (1 - 7), S 7 (1) = - 2 к s (1 - 7) (24)
(значения параметра κ для каждого из этих случаев мы различаем с помощью нижнего индекса).
Далее в качестве группы типа G a мы будем рассматривать группу G 1a (для которой к a = 1), а конкретный выбор группы типа G s пока отложим.
В силу ( 19 ) для значений S i (0) и S t (1), учитывая формулы ( 22) — ( 24 ), получаем:
ft (0) = 2(1 -ft ) - 7 •& + 2 к s (1 - 7) •& + 2(1-Д) =
= 27 ft - 27 ft + 2 к s (1 - 7) ft + 2 - 2 ft =
= 2 - 27 ft + 2(1 - 7 » )(к s - 1) ft ,
™ _ 2(1 - 3 t ) 1 9 n 2(1-Д) _
St(1) = • 7t • - 2 кs(1 -7t) • + = ft ft ft ft
= 27/ft - 27/ ft - 2 к s (1 - 7 t )/ A + 2/3 t - 2 =
= - 2 + 27/ft - 2(1 - 7 » )(к s - 1)/ Д
(здесь ft = V 3D-
Соотношение непрерывности ( 17 ) принимает вид:
A t (- 2 + 2 7 t - i /3 t - i - 2(1 - 7^ 1 ) ( к s - ft/ft - i ) = щ ( 2 - 2 7 t ft + 2(1 - 7 t ) ( к s - 1) ft) . (2 5)
4. Уравнения для обратных наклонов
Если в случае кубических сплайнов класса С 2 соотношения непрерывности служат основой при получении системы уравнений для наклонов m t интерполяционного сплайна, то нам будет удобнее работать с обратными наклонами — величинами N t = 1/ | m t | (знак модуля здесь актуален для монотонно убывающих данных). После нахождения величин N t обратный переход к наклонам m t , разумеется, не составит труда.
Выразим отдельные величины и выражения, входящие в соотношения ( 25 ), через обратные наклоны N t . Имеем:
Pt = mt/|At| , qt = mi+i/|Ai|, ft = VPt/qt = Vmt/mt+i = Nt+/12 Nt-1/2 , ft = Vft = N^ Nt 1/4 , 7t = VPt qt = Vmt mi+i/|Ai| = Nt+1/2 N 1/2/ |At |,
7 t - i /3 t - i = (N t - 1 / 2 N t Z 1 / 2 / | A t - i |) /(N t 1 / 2 N t Z 1 / 2) = N t - 1 / | A_i | ,
(︁
N t +1 / 2 N t 1 / 2 / | A t |)^ N t + / i2 N t 1 / 2) =N t - 1 / | A t | .
Теперь подставим все эти выражения в равенство ( 25) (не трогая пока множители 1 - 7 t- 1 и 1 - 7 t ), раскроем внешние скобки, соберем все слагаемые в одной части равенства и учтем, что A t + ^ t = 1:
2 - 2 A t N t - 1 / | A t - i | - 2 M t N t - 1 / | A t | + 2 A t (1 - 7 t - 1 )(к s - 1) N t - 1 / 4 N — +
+ 2 M t (1 - 7 t )(к s - 1)N t + /4 N t- 1 / 4 = 0 .
Умножим обе части полученного равенства на N t /2:
N t - A t / | A t - i | - P t / | A t | + A t (1 - 7 t - i ) ( к s - 1) N t 3 / N t —1 +
+ p t (1 - 7 t )(к s - 1)N t +/4N t 3 / 4 = 0 , / = 1,...,n - 1.
Обсудим смысл отдельных слагаемых в уравнениях ( 26 ).
В литературе по эрмитовой сплайн-интерполяции описаны три основных метода приближенного вычисления наклонов m i интерполяционного сплайна для случая, когда значения Y i первой производной интерполируемой функции во внутренних узлах сетки недоступны: метод среднего арифметического (Arithmetic Mean Method, AMM), метод среднего геометрического (Geometric Mean Method,
GMM) и метод среднего гармонического (Harmonic Mean Method, HMM) [30] . Они сводятся к за-
Методу HMM соответствует такое значение обратного наклона:
| A * | = | (Y +x - Y i ) + (Y -Y - 1 ) |
| A i || A i - 1 | ( h i + h i - 1 ) | A i || A i - 1 |
h i | A i | + h i - 1 | A i — x | A i hi
(h i + н г - 1 ) | A i || A i- i | = i AZT i + j A “| ;
таким образом, 2-е и 3-е слагаемые в ( 26 ) можно интерпретировать как взятое со знаком «минус» значение обратного наклона, вычисленное методом HMM.
В [4] для сплайна из множества Mfp (или M^2)указан способ приближенного вычисления наклона в узле Xi, при котором этот наклон вычисляют как значение в данном узле производной от вспомогатель- ного интерполянта вида
Е^ж) = Y i - x + (Y i +x - Y i )Ер ( Г X i-x ) , \Xi +x - X i - x /
где Е р е G 1a , а параметр р задают выражением „ у (1 - ж) _
Р = , где ж ж (1-У)
X i - X i - 1
Y i - Y i - x
------------, У = ----------- X i +x - X i - x ’ У Y i +x -Y i - x
.
Действуя данным способом, находим:
E № ) = А * Е р (ж) = А * (1 + рр - ж ) 2 ;
выполнив несложные преобразования, нетрудно убедиться, что E ( i ) (X i ) = A i- x A i / A * . Данное обстоятельство дает, кстати, прозрачную интерпретацию для метода HMM.
Обратимся теперь к 4-му и 5-му слагаемым в уравнениях ( 26 ). Заметим, что при достаточно густой сетке эти нелинейные слагаемые малы. В самом деле, разлагая Е (ж) и Е ' (ж) в точке ж = X i по Тейлору и полагая ж = X i +x , получаем:
Е (X i +x ) = Е (X i ) + Е ' (X i ) h i + Е '' (X i ) h 2 /2 + Е ''' (X i ) h 3 /6 + О (h ^ и
Е ' (X i +x ) = Е ' (X i ) + Е '' (X i ) h i + Е ''' (X i ) h 2 /2 + О (h0), откуда для параметров р и ^ i находим:
Р = 1 - Е ( X i ) hi + О (h 0 ) и 7г = 1 + —(^ h + О (h 3 ). (33) Pi 2Е ' (X i ) i V i! ’ 12Е ' (X i ) i V i! V 7
Из формул ( 33 ) следует, что при измельчении сетки p i ^ 1 и 7 i ^ 1, причем 7 i стремится к 1 значительно быстрее, чем p i . При этом 4-е и 5-е слагаемые в ( 26 ) за счет наличия в них множителей 1 - 7 i- x и 1 - 7 i быстро становятся малыми.
Данное обстоятельство позволяет применить для решения уравнений ( 26 ) метод простых итераций [3, с. 243–244] и сделать вывод о том, что решение этих нелинейных уравнений в случае густой сетки существует и единственно (впрочем, скорость сходимости метода простых итераций невелика, и на практике, как мы увидим позже, значительно лучшие результаты дает применение метода Ньютона). Вопрос же о разрешимости уравнений ( 26 ) при больших значениях шага сетки требует дальнейших исследований.
-
5. Решение уравнений для обратных наклонов
Переходя к решению уравнений для обратных наклонов сплайна, конкретизируем выбор группы типа G s . Сначала рассмотрим случай группы G 2S , для которой к s = 3.
Подставим в уравнения ( 26 ) это значение параметра к s и выражения множителей 1 — 7 ^ - 1 и 1 — 7 ^ через обратные наклоны N t . Дополним систему соотношениями для обратных наклонов N 0 и N , (мы ограничиваемся случаем граничных условий I типа , когда заданы значения первой производной интерполируемой функции в узлах Х 0 и Х , и требуется, чтобы значения первой производной сплайна F в этих узлах были такими же: F ‘ (Х 0 ) = У д , F ' (Х л ) = У , [5, с. 31]); тогда система уравнений для обратных наклонов примет вид
N g — 1 / | У | = 0 ,
N — А г / | А^ 1 | — щ / | А г | + 2 А г Л\ 3 4 N^ t — 2 А г N^4 N^4 / | А г- 1 | +
+ 2 щ Л\ 3 4 N + — 2 щ Л . ' 4 a/V | А г | = 0 , i = 1,...,п — 1 ,
N , — 1 / | У , | = 0 .
Данная система нелинейных уравнений допускает компактную запись в виде единого уравнения Ф (Х) = 0, где роль столбца Х играет набор значений No,..., N „ . Для ее решения будем использовать метод Ньютона [3, с. 249], расчетные формулы которого представим в форме:
Х к +1 = х к + P k , P k = — Ф(Х к )\Ф ‘ (Х к ),
где к — номер итерации, р к — вектор полного шага (разность значений Х на двух последовательных итерациях), Ф ' (Х к ) — вычисленная для текущего значения Х к матрица Якоби (матрица из частных производных компонент вектор-функции Ф по компонентам ее аргумента), а обратной дробной чертой обозначена операция левого деления столбца на матрицу, то есть операция вычисления решения системы линейных алгебраических уравнений Ф ‘ (Х к ) р к = — Ф (Х к ).
В рассматривамом случае в качестве начальных приближений к решению системы ( 34 ) естественно при i = 1,..., п — 1 использовать значения N 0 , вычисляемые по формуле ( 30) (для Ng и N , в силу ( 34) фактически известны точные значения), что мы и будем далее предполагать.
Для дважды непрерывно дифференцируемой функции Ф при условии невырожденности матрицы Якоби в окрестности точного решения метод Ньютона сходится весьма быстро (с квадратичной скоростью), но его сходимость носит локальный характер (требуется достаточная близость начального приближения к точному решению) [3, с. 250–251]. С целью обеспечить увеличение области сходимости метода Ньютона применяют различные его модификации, предусматривающие контроль нормы текущей невязки Ф (Х к ) и дробление полного шага, если на текущей итерации эта норма возрастает или жеубы-вает, но недостаточно быстро.
Изложим алгоритм к-й итерации применявшейся нами конкретной реализации одного из вариантов модификации метода Ньютона, предложенных в 1980 году О. П. Бурдаковым (см. [31] ); предполагаем, что заданы требуемая точность е решения уравнения Ф (Х) = 0 и априорная верхняя граница Н для величины шага. Алгоритм состоит из шести этапов:
-
1) вычислить р к = — Ф (Х к ) \ Ф ' (Х к );
-
2) (условие останова): если || р к ^ < е, то принять Х к + р к за искомое приближенное значение точного решения и завершить итерации метода;
-
3) положить р к = р к , если || р к || 6 Н , и р к = Нр к / || р к || в противном случае;
-
4) взять i = 0;
-
5) если || Ф (Х к + р> к /2 г ) || 6 (1 — 1/2 г +1 ) || Ф (Х к ) || , то перейти к следующему этапу, а иначе увеличить i на единицу и повторить данный этап;
-
6) принять за Х к +1 ту из рассмотренных точек Х к + р к /2 г , для которой значение нормы невязки является наименьшим, и перейти к следующей итерации.
Теперь заметим, что в рассматриваемом случае матрица Якоби является трехдиагональной и при i = 1,..., п — 1 i-е уравнение системы Ф ‘ (Х к ) р к = — Ф (Х к ) имеет вид:
-
c i p k,i - 1 + a i p k,i + b i Р к,г +1 E k,i ,
где E kji — г-я компонента невязки, вычисленной в точке X к (то есть значение левой части г-го уравнения системы ( 34 ) при текущих значениях обратных наклонов N i ), а c i = д Фк дХ^ 1 , a i = дФ i /9N i , b i = дФ i /дN i +1 . Явные выражения для этих коэффициентов таковы:
C i = A i N i 1 / 2 (N i 1 / 4 N i 1 - / 4 + N i - 1 / 4 N i - 1/4 / | A i - i | ) / 2N_ 1 , a i = 1 + ( 3A i N i 1 / 4 N i 1 / 14 - A i N i - 1 / 4 N i Z 1/4 / | A i - 1 | + 1 / 4 1 / 4 - 1 / 4 - 1 / 4 1 / 2
-
+ 3 ^ i N i N i +1 - M i N i N i +1 / | A i | )/ 2 N i ,
-
6. Результаты вычислительных экспериментов
b i = M i N i 1 / 2 ( N i 1 / 4 n + + N i - 1 / 4 N i +1 / 4 / | A i | ) / 2N i +1 .
Мы уже отмечали, что для достаточно густой сетки нелинейные слагаемые в уравнениях для обратных наклонов малы. В этих условиях матрица коэффициентов системы Ф ‘ (X к ) р к = — Ф (X k ) имеет выраженное диагональное преобладание. Отсюда следует [5, с. 60–62], что она заведомо невырождена, а для решения рассматриваемой системы можно эффективно использовать метод монотонной прогонки. После того, как обратные наклоны N i будут вычислены, можно по явным формулам найти и сами наклоны m i , и значения коэффициентов Д и ^ i , чем и завершается процесс построения интерполяционного сплайна из множества M ^22 .
Подчеркнем отличие таких сплайнов от сплайнов из пространства P3\. Для последних уравнения для наклонов являются линейными, и решение системы линейных уравнений с трехдиагональной матрицей коэффициентов выполняется один раз; в случае же сплайнов из множества M ^22 такую систему приходится решать несколько раз — в зависимости от того, насколько быстро для конкретных данных сходится метод Ньютона и каково значение параметра е.
Теперь рассмотрим случай группы G 1s . Для нее к s = 1; это означает, что в системе уравнений для обратных наклонов ( 26 ) 4-е и 5-е слагаемые обращаются в нуль, и непрерывность второй производной интерполяционного сплайна будет обеспечена, если в качестве обратных наклонов N i взять значения N 0 , вычисленные в соответствии с формулой ( 30) .
Таким образом, интерполяция сплайнами из множества M 1 Δ 1 2 вообще не требует решения систем линейных уравнений (автор должен признаться, что этот результат, полученный 26 августа — через несколько дней после завершения вычислительных экспериментов со сплайнами из множества M 1 Δ 2 2 , стал для него ошарашивающим!).
В то же время нужно отметить, что с этой разновидностью интерполяционных сплайнов не все обстоит вполне благополучно. Они действительно успешно решают задачу монотонной интерполяции класса С 2 ; однако расчет наклона т 0 по любой из формул ( 27 ) — ( 29) основан на использовании всего трех значений интерполируемой функции: Y i - 1 , У ^ , Y i +i (и представляет собой модификацию интерполяции кубическими многочленами Бесселя; известно, что порядок погрешности при такой интерполяции составляет O(h 3 ), где h — максимальный шаг сетки [32, с. 50]). Интерполяция же сплайнами из пространства P 3 Δ 1 обеспечивает для достаточно гладкой интерполируемой функции порядок погрешности O(h 4 ) [5, с.33].
Рассмотрим результаты ряда вычислительных экспериментов по интерполированию монотонных функций сплайнами из множеств M 1 Δ 1 2 и M 1 Δ 2 2 .
Пример 1. Как и в [4] , выполним интерполирование на отрезке [0, 1] функции у = е - Кх , где К = 4, при граничных условиях типа I (начнем с числа п отрезков разбиения, равного 1, и будем последовательно сгущать используемые сетки, каждый раз деля отрезки разбиения пополам). Для сравнения приведем также результаты эрмитовой интерполяции данной функции (взятые из [4] ) и результаты интерполяции кубическими сплайнами дефекта 1.
Отметим, что интерполянты из пространств P ^2 и P ^1 сохраняют монотонность исходной функции лишь при п> 1. Что касается точности приближения, то поведение норм погрешностей таково:
|
п |
1 |
2 |
4 |
8 |
16 |
32 |
|
P 3Δ2 |
0.119 |
0.0165 |
0.00161 |
0.000127 |
0.00000899 |
0.000000597 |
|
M 1Δ11 |
0.072 |
0.0133 |
0.00204 |
0.000283 |
0.00003741 |
0.000004786 |
|
M 1Δ21 |
0.059 |
0.0082 |
0.00080 |
0.000064 |
0.00000449 |
0.000000298 |
|
P 3Δ1 |
0.119 |
0.0219 |
0.00200 |
0.000149 |
0.00000969 |
0.000000621 |
|
M 1Δ12 |
0.072 |
0.0485 |
0.01014 |
0.001658 |
0.00023705 |
0.000031712 |
|
M 1Δ22 |
0.059 |
0.0071 |
0.00076 |
0.000062 |
0.00000442 |
0.000000296 |
Обращает на себя внимание высокая точность приближения, получаемая при выборе группы G 2 s в качестве реализации группы типа G s .
Для оценивания скорости приближения вычислим для приведенных данных значения показателей затухания , введенных с этой целью К. Де Бором [32, с. 30] и определяемых так:
« rnn = (ln( H М) - ln( H е т|| )) / 1п(п/т) , (37)
где || е т || и || е п | — значения норм погрешностей интерполяции для чисел отрезков разбиения, равных соответственно т и п. Результаты вычислений таковы:
|
т, п |
1,2 |
2, 4 |
4, 8 |
8, 16 |
16, 32 |
|
P 3Δ2 |
— 4.88 |
— 4.55 |
— 4.31 |
— 4.17 |
— 4.09 |
|
M 1Δ11 |
— 4.16 |
— 3.67 |
— 3.36 |
— 3.18 |
— 3.10 |
|
M 1Δ21 |
— 4.87 |
— 4.55 |
— 4.31 |
— 4.17 |
— 4.09 |
|
P 3Δ1 |
— 4.18 |
— 4.68 |
— 4.46 |
— 4.26 |
— 4.14 |
|
M 1Δ12 |
— 0.97 |
— 3.06 |
— 3.08 |
— 3.06 |
— 3.03 |
|
M 1Δ22 |
— 5.22 |
— 4.39 |
— 4.26 |
— 4.14 |
— 4.08 |
Для сплайнов из множества M f'l2 (а также для эрмитовых интерполянтов из множества M f'l 1 ) значения показателей затухания соответствуют погрешности O(h 3 ) (чего и следовало, как мы отмечали выше, ожидать), а для остальных интерполянтов — погрешности 0(^ 4 ).
Отметим также, что построение интерполянта из множества M ^22 при е = 10 - 14 (это значение, использовавшееся во всех представленных здесь вычислительных экспериментах, лишь на полтора десятичных порядка больше емаш — машинного эпсилон , служащего [3, с. 41—44] мерой относительной точности машинной арифметики; для чисел двойной точности в стандарте IEEE емаш « 2.22 • 10 - 16 ) потребовало 4 итераций метода Ньютона при п = 2, 4, 8 и 3 итераций при п = 16, 32.
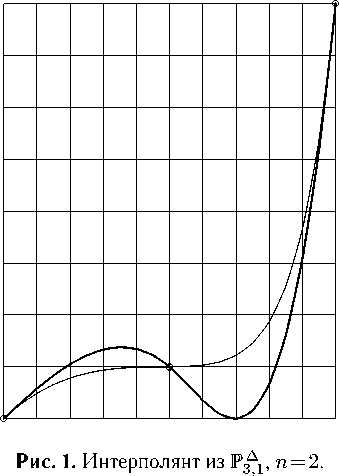
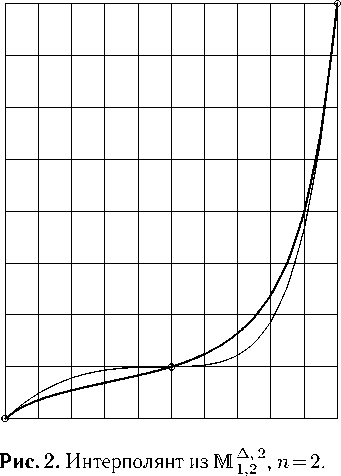
Пример 2. Рассмотрим с целью тестирования алгоритмов монотонной интерполяции следующую функцию:
/ (ж) = 4ж 9 — ж 7 + 4ж 3 — 6ж 2 + 3ж. (38)
Данная функция на отрезке [ 0, 1] монотонно возрастает от 0 до 4, принимая при ж = 1 / 2 значение 1 / 2 . Ее интерполирование кубическими сплайнами представляет определенные трудности в плане обеспечения монотонности интерполянта, поскольку ее первая производная на данном отрезке изменяется резко неравномерно: при ж = 0 она принимает «умеренное» значение, равное 3, при ж = 1 / 2 — весьма малое значение, равное 1 / 32 , а при ж =1 — «большое» значение, равное 32.
Вычислительные эксперименты по интерполированию данной функции показали, что при п = 1 и п = 2 интерполянты из пространств P3Δ2 и P3Δ1 не являются монотонными. На рисунках 1 и 2 представлены результаты интерполирования функции (38) при п = 2 сплайнами соответственно из пространства Р^ и из множества M ^22 (тонкая линия отвечает интерполируемой функции, более толстая — интерполянту).
Нормы погрешностей ведут себя так:
|
п |
1 |
2 |
4 |
8 |
16 |
32 |
64 |
|
P 3Δ2 |
2.25 |
0.48 |
0.059 |
0.0052 |
0.00038 |
0.000026 |
0.00000168 |
|
M 1Δ11 |
0.91 |
1.31 |
0.105 |
0.0127 |
0.00159 |
0.000199 |
0.00002466 |
|
M 1Δ21 |
1.01 |
1.18 |
0.076 |
0.0061 |
0.00044 |
0.000030 |
0.00000193 |
|
P 3Δ1 |
2.25 |
0.65 |
0.079 |
0.0062 |
0.00042 |
0.000027 |
0.00000172 |
|
M 1Δ12 |
0.91 |
0.49 |
0.394 |
0.0644 |
0.00939 |
0.001267 |
0.00016284 |
|
M 1Δ22 |
1.01 |
0.26 |
0.198 |
0.0116 |
0.00040 |
0.000028 |
0.00000188 |
В данном случае интерполянты из множеств M 1 Δ 2 1 и M 1 Δ 2 2 практически не уступают по точности приближения интерполяционным кубическим сплайнам. Показатели затухания а ттг при этом принимают такие значения:
|
т, п |
1,2 |
2, 4 |
4, 8 |
8, 16 |
16, 32 |
32, 64 |
|
P 3Δ2 |
- 3.79 |
- 4.11 |
- 4.15 |
- 4.10 |
- 4.06 |
- 4.03 |
|
M 1Δ11 |
0.90 |
- 4.94 |
- 3.60 |
- 3.27 |
- 3.13 |
- 3.08 |
|
M 1Δ21 |
0.40 |
- 5.37 |
- 4.29 |
- 4.13 |
- 4.07 |
- 4.04 |
|
P 3Δ1 |
- 3.06 |
- 4.13 |
- 4.33 |
- 4.23 |
- 4.13 |
- 4.07 |
|
M 1Δ12 |
- 1.55 |
- 0.42 |
- 3.08 |
- 3.03 |
- 3.02 |
- 3.03 |
|
M 1Δ22 |
- 3.36 |
- 0.53 |
- 4.82 |
- 5.30 |
- 3.99 |
- 4.00 |
Вновь для интерполянтов из множеств M 1 Δ 1 1 и M 1 Δ 1 2 значения показателей затухания соответствуют погрешности O(h 3 ), а для остальных интерполянтов — погрешности O(h 4 ). Построение интерполян-та из множества M 1 Δ 2 2 во всех случаях потребовало 5 итераций метода Ньютона.
Пример 3. Рассмотрим следующий набор данных, взятый из работы [16] :
Х г 1000 1250 1500 1920 1960 1980 1990 2000 2005 2011
Хг 0.31 0.40 0.50 1.86 3.02 4.44 5.27 6.06 6.45 7.02
Здесь представлены значения численности населения земного шара (млрд человек) с 1000 по 2011 год по оценкам Бюро переписи населения США (United States Census Bureau, USCB). Эти данные являются строго монотонными, и при их интерполировании естественно, как отмечается в [16] , потребовать строгой монотонности и от интерполянта.
На рисунке 3 видно, что интерполяционный сплайн из пространства Р-^, построенный для этих данных, монотонным не является.
В то же время (Рис. 4) интерполянт из множества M ^ 2 2 (его построение потребовало 5 итераций метода Ньютона) сохраняет монотонность. В обоих случаях для задания значений производных в узлах Х 0 и Х 9 использовалась линейная интерполяция по двум узлам (характер данных это допускает).
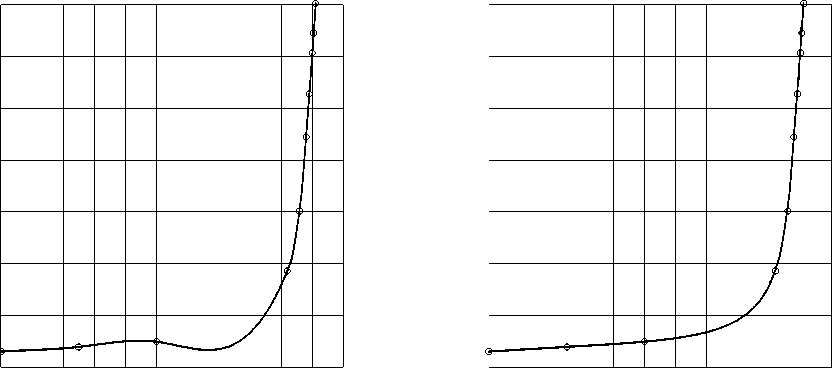
Рис. 3. Данные из [16] : интерполянт из P 3 Δ 1 Рис. 4. Данные из [16] : интерполянт из M 1 Δ 2 2
В работе [16] эти данные интерполировались рациональными сплайнами класса С 2 с двумя свободными параметрами, выбираемыми эмпирически. Построенные интерполянты также сохраняли монотонность данных, однако представленный на рисунке 4 график является более плавным; на приведенных же в [16] графиках интерполянтов на отрезке [Х 3 , Х 4 ] (то есть между 1920 и 1960 годом) заметна точка перегиба. Согласно [32, с. 229], точка перегиба на отрезке [Х г , Х г +1 ] — чужеродная , если величины 5 г = Д г — Д г - 1 и 5 г +1 = Д г +1 — Д г имеют одинаковый знак; в нашем же случае 5 3 « 0.026 и 5 4 « 0.042, так что упомянутая точка перегиба действительно является чужеродной.
Интерполирование этих же данных сплайнами из множества M 1 Δ 1 2 дало результат, мало отличающийся от представленного на рисунке 4. Максимальное различие между обоими интерполянтами на всем отрезке [Х 0 , Х 9 ] составляло менее 2 %.
Заметим также, что при построении интерполянтов из множества M 1 Δ 2 2 во всех выполненных вычислительных экспериментах метод Ньютона сходился без каких-либо осложнений, и на всех итерациях шаги метода были полными.
-
7. Заключение
В данной работе для сплайн-интерполянтов, построенных с использованием однопараметрических групп диффеоморфизмов единичного отрезка [0, 1] и сохраняющих при строго монотонных исходных данных свойство строгой монотонности, предложены способы обеспечения гладкости класса С 2 для получаемого интерполянта. Обсуждаются свойства интерполянтов предложенного вида. Приведены результаты ряда вычислительных экспериментов, подтвердивших эффективность предложенного подхода.
Список литературы Монотонная сплайн-интерполяция класса C2 на основе однопараметрических групп диффеоморфизмов
- Квасов Б.И. Методы изогеометрической аппроксимации сплайнами. М.: Физматлит, 2006. 360 с
- Богданов В.В., Волков Ю.С. Об условиях формосохранения при интерполяции параболическими сплайнами по Субботину//Труды Ин-та математики и механики УрО РАН. 2016. Т. 22. № 4. С. 102-113
- Амосов А.А., Дубинский Ю.А., Копчёнова Н.В. Вычислительные методы. 3-е изд. М.: Издат. дом МЭИ, 2008. 672 с
- Осадченко Н.В. Локальная монотонная интерполяция и однопараметрические группы//Пространство, время и фундаментальные взаимодействия. 2017. № 2. С. 60-73
- Завьялов Ю.С., Леус В.А., Скороспелов В.А. Сплайны в инженерной геометрии. М.: Машиностроение, 1985. 224 с
- Fritsch F.N., Carlson R.E. Monotone Piecewise Cubic Interpolation//SIAM Journal on Numerical Analysis. 1980. Vol. 17. № 2. P. 238-246
- Miroshnichenko V.L. Convex and Monotone Spline Interpolation//Constructive Theory of Functions '84: Proc. Internat. Conf. Varna, 1984. P. 610-620
- Мирошниченко В.Л. Достаточные условия монотонности и выпуклости для интерполяционных кубических сплайнов класса �2//Вычислительные системы: cб. научн. тр. Вып. 137. Приближение сплайнами. Новосибирск: Ин-т математики СО АН СССР, 1990. С. 31-57
- Волков Ю.С. О монотонной интерполяции кубическими сплайнами//Вычислительные технологии. 2001. Т. 6. № 6. С. 14-24
- Волков Ю.С., Богданов В.В., Мирошниченко В.Л., Шевалдин В.Т. Формосохраняющая интерполяция кубическими сплайнами//Математические заметки. 2010. Т. 88. Вып. 6. С. 836-844
- Квасов Б.И. Монотонная и выпуклая интерполяция весовыми кубическими сплайнами//Журнал вычислительной математики и математической физики. 2013. Т. 53. № 10. С. 1610-1621
- Богданов В.В., Волков Ю.С. Выбор параметров обобщенных кубических сплайнов при выпуклой интерполяции//Сибирский журнал вычислительной математики. 2006. Т. 9. № 1. С. 5-22
- Hussain M.Z., Sarfraz M., Shaikh T.S. Monotone Data Visualization using Rational Functions//World Applied Sciences Journal. 2012. Vol. 16. № 11. P. 1496-1508
- Merrien J.-L., Sablonnie` re P. Rational Splines for Hermite Interpolation with Shape Constraints//Computer Aided Geometric Design. 2013. Vol. 30. № 34. P. 296-309
- Karim S.A.A., Kong V.P. Monotonicity-Preserving Using Rational Cubic Spline Interpolation//Research Journal of Applied Sciences. 2014. Vol. 9. № 4. P. 214-223
- Abbas M., Majid A.A., Ali J.M. Monotonicity-Preserving �2 Rational Cubic Spline for Monotone Data//Applied Mathematics and Computation. 2012. Vol. 219. P. 2885-2895.
- Karim S.A.A., Kong V.P. Shape Preserving Interpolation Using �2 Rational Cubic Spline//Journal of Applied Mathematics. 2016. Vol. 2016. Article ID 4875358. P. 1-14
- Корецкий А.В., Осадченко Н.В., Погорелов Д.Ю. Практика моделирования робототехнических систем средствами программного комплекса "Универсальный механизм"//Информационные средства и технологии: тезисы докладов междунар. конференции. Москва, 1996. Т. 2. М.: Изд-во "Станкин", 1996. С. 54-59
- Корецкий А.В., Осадченко Н.В. Статический и кинематический анализ манипуляционных роботов на базе теории винтов//Автоматическое управление и интеллектуальные системы: межвузовск. сб. научн. трудов. М.: Моск. гос. ин-т радиотехники, электроники и автоматики, 1996. С. 114-119
- Корецкий А.В., Осадченко Н.В. Компьютерное моделирование кинематики манипуляционных роботов. М.: Изд-во МЭИ, 2000. 48 с
- Мартыненко Ю.Г., Осадченко Н.В. Движение шарнирного двухзвенника по гладкой кривой переменной кривизны//Вестник МЭИ. 2001. № 3. С. 14-18
- Корецкий А.В., Осадченко Н.В. Решение задач кинематики на персональном компьютере. М.: Изд-во МЭИ, 2004. 48 с
- Осадченко Н.В., Абдельрахман А.М.З. Моделирование движения робота, ползающего по гладкой поверхности//Вестник МЭИ. 2010. № 3. С. 28-36
- Curtright T., Zachos C. Evolution Profiles and Functional Equations//Journal of Physics A: Mathematical and Theoretical. 2009. Vol. 42. Article ID 485208. P. 1-16
- Горяйнов В.В., Кудрявцева О.С. Однопараметрические полугруппы аналитических функций, неподвижные точки и функция Кёнигса//Математический сборник. 2011. Т. 202. № 7. С. 43-74
- Горяйнов В.В. Полугруппы аналитических функций в анализе и приложениях//Успехи математических наук. 2012. Т. 67. Вып. 6 (408). С. 5-52
- Винберг Э.Б. Курс алгебры. 3-е изд. М.: МЦНМО, 2017. 592 с
- Ibraheem F., Hussain M., Hussain M.Z. Monotone Data Visualization Using Rational Trigonometric Spline Interpolation//The Scientific World Journal. 2014. Vol. 2014. Article ID 602453. P. 1-14
- Dube M., Rana P.S. Positivity Preserving Interpolation of Positive Data by Rational Quadratic Trigonometric Spline//IOSR Journal of Mathematics. 2014. Vol. 10. № 2. P. 42-47
- Delbourgo R., Gregory J.A. The Determination of Derivative Parameters for a Monotonic Rational Quadratic Interpolant//IMA Journal of Numerical Analysis. 1985. Vol. 5. № 4. P. 397-406
- Бурдаков О.П. Некоторые глобально сходящиеся модификации метода Ньютона для решения систем нелинейных уравнений//Докл. АН СССР. 1980. Т. 254. № 3. С. 521-523
- Де Бор К. Практическое руководство по сплайнам. М.: Радио и связь, 1985. 304 с
