Новый тип двухрежимного четвероногого робота

Автор: Цзо Лян, Ли Чжочэн, Ван Чжэн
Журнал: Международный журнал гуманитарных и естественных наук @intjournal
Рубрика: Технические науки
Статья в выпуске: 5-2 (68), 2022 года.
Бесплатный доступ
Спроектирована конструкция двухрежимного четвероногого робота. Новый тип робот может переключаться между режимом шагающего и режимом колесного с помощью электрических цилиндров на ногах. Чтобы выполнить эта задача, разработан токопроводящий коленный сустав робота. Рассмотрены зависимости параметров: ширины, толщины и количества канавок от деформации детали и оптимизированы параметры важных частей робота. Наконец, с помощью моделирования ортогонального эксперимента определены значения параметров.
Четвероногий робот, новый тип роботов, колечный режим, шагающий режим
Короткий адрес: https://sciup.org/170193554
IDR: 170193554
A new type of dual-mode four-legged robot
The design of a dual-mode four-legged walking robot has been designed. In the future, this robot will be used for city patrols and factory inspections. An earlier analysis of modern technological solutions showed their main advantages and disadvantages, on the basis of which a conclusion was made about the new design. In the future, the generated tasks and important parts of the new robot will be tested using simulation. A conclusion was made about the main design parameters of the robot.
Текст научной статьи Новый тип двухрежимного четвероногого робота
ный режим и шагающий режим. Когда робот находится в колесном режиме, он может двигаться с высокой скоростью, а когда робот находится в режиме движения ногами, он может ходить в различных сложных условиях. Скорость и устойчивость робота тесно связаны с размером колес. Если колеса слишком маленькие, это приведет к тому, что робот будет завибрировать во время движения. Если колеса будут слишком большими, робот не сможет выполнять сложные действия, такие как подъем по лестнице в шагающем режиме [3].
В последние годы технология бионических четвероногих роботов быстро совершенствовалась. Китайская компания Unitree Robotics произвела множество бионических четвероногих роботов. Эти четвероногие роботы уже могут быть легко куплены людьми через интернет-магазины. Но четвероногому роботу есть что улучшить. На основе исследования существующих гибридных четвероногих роботов, разработана четвероногого шагающего робота [2]. Этот вид роботов может автоматически переключаться между двумя режимами с помощью электрических цилиндров. У робота два режима, колес-
Рис. 1. Новый двухрежимный четвероногий робот
установленные на голенях, для переклю- Новый двухрежимный четвероногий ро- чения между двумя режимами (рис. 1). Ко- бот использует электрические цилиндры, гающего режима в колёсный режим. Роботы с двумя режимами могут адаптироваться практически к любой сложной среде и обладают преимуществами шагающих роботов и колесных роботов.
гда робот находится в колёсном режиме, привод удлини, робот переходит из колёсного режима в шагающий режим. А когда робот находится в шагающем режиме, привод сокращает, робот переходит из ша-
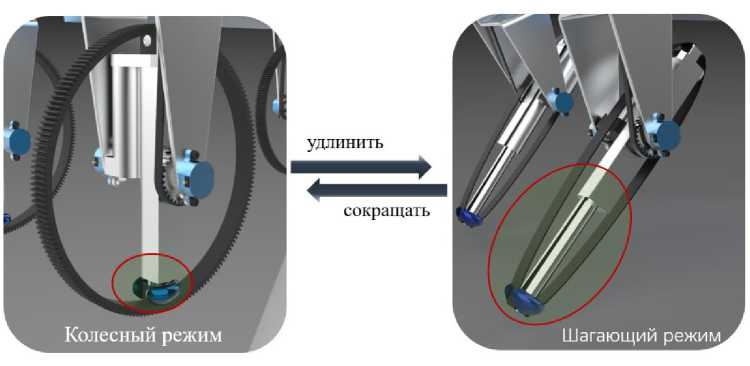
Рис. 2. Принцип работы двух режимов робота
линдра вокруг ног робота, он должен иметь специальную конструкцию для проведения электричества (рис. 3). Новая про- водящая конструкция состоит из двух частей: одна – это полый вал (1), через который могут проходить провода; другая представляет собой гребенчатую структуру (2) с множеством зубцов, которая может улучшить проводимость границы раздела. При вращении электрического цилиндра, гребнеобразная конструкция плотно прижимается к металлическому болту (5), установленному на изоляционной втулке (4) полого вала. Такая же конструкция установлена с обеих сторон элек- трического цилиндра, которые соответственно используются для подключения положительного и отрицательного элек-
Новая конструкция должна соответствовать следующим требованиям:
-
1) Когда электрический цилиндр со-
- вершает круговое движение вместе с колесом, электрический ток может передаваться на контроллер электрический цилиндр через вращающееся устройство.
-
2) Когда робот находится в режиме колеса, колеса не должны легко деформироваться. Когда робот хочет переключиться из колесного режима в ходовой, колеса должны легко деформироваться.
Чтобы соответствовать вышеуказанным требованиям, спроектирована новая проводящая конструкция и оптимизированы параметры колес.
Новая проводящая конструкция. Когда колеса вращаются, чтобы не допустить тродов источника питания.
запутывания провода электрического ци-
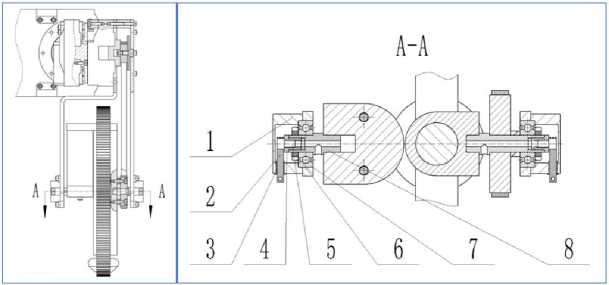
Рис. 3. Специальная конструкция для проведения электричества
как жесткость в направлении X способствует тому, чтобы колес сохранят свою первоначальную форму.
Конструкция деформируемых колес. Как показано на рис. 4, жесткость колеса в направлении Y не способствует взаимному переключению двух режимов, в то время
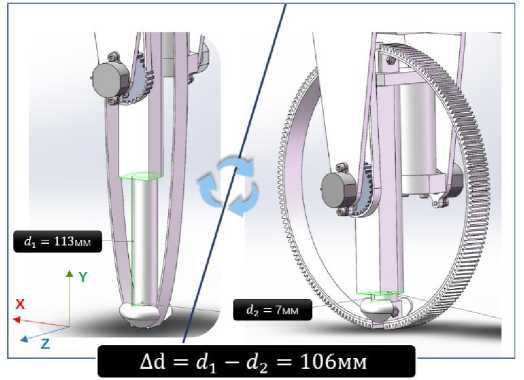
Рис. 4. Состояния колес в двух режимах
зазора внутри дуги будет уменьшаться, пока не столкнутся. В это время жесткость металлической дуги будет увеличена. Когда два конца металлической полукруглой дуги удаляются друг от друга, зазор увеличивается, при этом зазор не влияет на жесткость металлической дуги.
Колеса с механической анизотропией. Вдохновленный арочным мостом (рис. 5), несколько прорезей, прорезанных внутри металлической полукруглой дуги, значительно изменяют жесткость металлической дуги в направлении X и Y. Когда два конца металлической полукруглой дуги находятся близко друг к другу, ширина
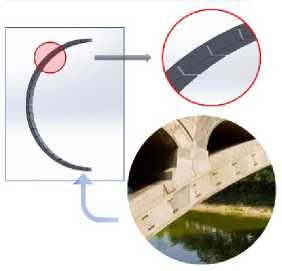
Рис. 5. Металлическая полукруглая дуга с несколькими зазорами
радиус принимается за фиксированное значение. Сначала необходимо параметризовать детали, а затем определить экспериментальные данные параметров в соответствии с предварительными экспериментами.
Определены параметры Колеса. После параметризации деталей используются ортогональные эксперименты для анализа влияния различных параметров деталей на жесткость деталей в направлениях X и Y [4]. Радиус полукруглой дуги зависит от хода электрического цилиндра, поэтому
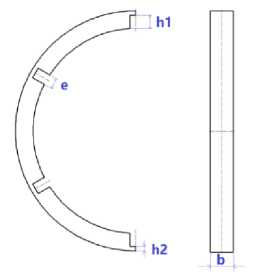
Рис. 6. Параметры детали
Таблица 1. Экспериментальные данные
|
1 |
2 |
3 |
4 |
5 |
|
|
Длина зазора h 1 (мм) |
1 |
2 |
3 |
4 |
5 |
|
Толщина обода h2 (мм) |
0.6 |
0.8 |
1 |
1.2 |
1.4 |
|
Ширина зазора e (мм) |
0.1 |
0.15 |
0.2 |
0.25 |
0.3 |
|
Ширина детали b (мм) |
10 |
15 |
20 |
25 |
30 |
|
Количество зазоров n |
6 |
12 |
18 |
24 |
30 |
X как анизотропию механического направления детали [5].
Результаты ортогонального теста представлены в таблице ниже.
Ниже приведены данные моделирования, полученные с помощью ортогонального эксперимента. Чтобы оценить влияние параметров на механические свойства детали в направлении X и направлении Y, мы определяем отношение величины деформации в направлении Y к направлению
Таблица 2. Результаты ортогонального теста
|
^ 1 |
^ 2 |
e |
b |
n |
Y ( мм ) |
X ( мм ) |
Ч |
|
|
1 |
3 |
0.6 |
0.2 |
15 |
6 |
87.973 |
4.8425 |
18.16686 |
|
2 |
3 |
1 |
0.1 |
10 |
30 |
151.76 |
6.0442 |
25.10837 |
|
3 |
3 |
1.4 |
0.15 |
20 |
18 |
27.384 |
1.1244 |
24.35432 |
|
4 |
3 |
1.2 |
0.25 |
30 |
24 |
31.236 |
1.2581 |
24.82792 |
|
5 |
3 |
0.8 |
0.3 |
25 |
12 |
49.585 |
2.1487 |
23.07674 |
|
6 |
4 |
1 |
0.15 |
30 |
12 |
22.484 |
0.9939 |
22.62199 |
|
7 |
4 |
1.4 |
0.25 |
25 |
6 |
9.9614 |
0.52713 |
18.89743 |
|
8 |
4 |
1.2 |
0.3 |
15 |
30 |
73.46 |
2.9287 |
25.0828 |
|
9 |
4 |
0.8 |
0.2 |
10 |
18 |
148.77 |
6.1525 |
24.18041 |
|
10 |
4 |
0.6 |
0.1 |
20 |
24 |
172.1 |
6.5312 |
26.35044 |
|
11 |
1 |
0.8 |
0.25 |
20 |
30 |
213.88 |
8.3557 |
25.5969 |
|
12 |
1 |
1.4 |
0.1 |
15 |
12 |
78.147 |
3.1364 |
24.91615 |
|
13 |
1 |
0.6 |
0.3 |
30 |
18 |
195.12 |
7.8794 |
24.76331 |
|
14 |
1 |
1.2 |
0.15 |
10 |
6 |
145.99 |
6.0365 |
24.18454 |
|
15 |
1 |
1 |
0.2 |
25 |
24 |
101.45 |
4.0323 |
25.15934 |
|
16 |
2 |
1.2 |
0.3 |
10 |
18 |
96.172 |
3.9049 |
24.62854 |
|
17 |
2 |
0.8 |
0.2 |
20 |
24 |
120.09 |
4.64 |
25.88147 |
|
18 |
2 |
0.6 |
0.1 |
30 |
12 |
77.768 |
3.3143 |
23.46438 |
|
19 |
2 |
1 |
0.15 |
25 |
6 |
31.971 |
1.5037 |
21.26155 |
|
20 |
2 |
1.4 |
0.25 |
15 |
30 |
63.308 |
2.515 |
25.17217 |
|
21 |
5 |
0.8 |
0.1 |
20 |
24 |
94.212 |
3.6266 |
25.97805 |
|
22 |
5 |
0.6 |
0.15 |
30 |
12 |
58.817 |
2.597 |
22.64806 |
|
23 |
5 |
1 |
0.25 |
25 |
6 |
16.277 |
0.92104 |
17.67241 |
|
24 |
5 |
1.4 |
0.3 |
15 |
30 |
52.506 |
2.095 |
25.06253 |
|
25 |
5 |
1.2 |
0.2 |
10 |
18 |
65.387 |
2.7117 |
24.11292 |
R: Значение диапазона,
Для дальнейшего анализа экспериментальных данных экспериментальные данные были дополнительно обработаны.
К Представляет сумму соответствующих экспериментальных результатов, когда номер уровня в любом столбце равен i.
Из этого можно сделать несколько основных предварительных выводов:
-
1) При заданных параметрах наибольшее влияние на деформацию конструкции оказывает длина шва h 1 ;
-
2) При заданных параметрах влияние длины обода колеса h2 на направление X больше, чем влияние на направление Y;
-
3) При заданных параметрах влияние толщины b на направление Y больше, чем влияние на направление X.
Путем ортогональных экспериментов мы обнаружили, что для направления Y порядок влияющих факторов от больших до малых:
h 1 (447.388) > b (418.4216) > h2 ( 395.2306 ) > e (287.341) > n ( 268.113 ) > Пустой столбец ( 239.4094 )
Для направления X:
h 1 (17.48896) > h2 ( 15.76647 ) > b (15.71693) > e (10.3972) > n ( 9.7483 ) > Пустой столбец ( 9.40286 )
Таблица 3. Статистики в направлении Y
|
h i |
Пустой столбец |
h2 |
e |
b |
n |
|
|
К |
347.938 |
514.721 |
591.778 |
523.67 |
355.394 |
292.1724 |
|
К г |
426.7754 |
535.7484 |
323.942 |
573.987 |
608.079 |
554.914 |
|
К |
734.587 |
296.339 |
231.3064 |
286.646 |
627.666 |
532.833 |
|
К * |
389.309 |
342.63 |
412.245 |
334.6624 |
385.425 |
519.088 |
|
К |
287.199 |
496.37 |
626.537 |
466.843 |
209.2444 |
286.801 |
|
R |
447.388 |
239.4094 |
395.2306 |
287.341 |
418.4216 |
268.113 |
Таблица 4. Статистики в направлении Y
|
h i |
Пустой столбец |
h2 |
e |
b |
n |
|
|
К |
15.4179 |
21.7236 |
25.1644 |
22.379 |
15.5176 |
13.83087 |
|
К г |
17.13343 |
21.68773 |
13.49514 |
22.6527 |
24.8498 |
21.9386 |
|
К |
29.4403 |
12.32074 |
9.39793 |
12.2555 |
24.2779 |
21.7729 |
|
К * |
15.8779 |
14.1457 |
16.8399 |
13.57697 |
16.0427 |
20.0882 |
|
К |
11.95134 |
19.9431 |
24.9235 |
18.9567 |
9.13287 |
12.1903 |
|
R |
17.48896 |
9.40286 |
15.76647 |
10.3972 |
15.71693 |
9.7483 |
Таблица 5. Статистика n
|
h i |
Пустой столбец |
h2 |
e |
b |
n |
|
|
К |
115.5342 |
113.6623 |
119.8872 |
117.501 |
118.4005 |
100.1828 |
|
К г |
117.1331 |
117.2986 |
111.8237 |
125.8174 |
122.2148 |
126.0228 |
|
К |
124.6202 |
115.7333 |
118.4026 |
115.0705 |
128.1612 |
122.0395 |
|
К * |
120.4081 |
120.2486 |
122.8367 |
112.1668 |
118.3257 |
128.1972 |
|
К з |
115.474 |
122.8968 |
124.7136 |
122.6139 |
106.0675 |
116.7273 |
|
R |
9.146264 |
9.234467 |
12.88990 |
13.65056 |
22.0937 |
28.01441 |
Таблица 6. Окончательно выбранные параметры
Заключение. В ходе работы спроектирована конструкция двухрежимного четвероногого шагающего робота. В соответствии с новой структурой робота спроектирована новая проводящая конструкция и оптимизированы параметры колес. Пара-
Список литературы Новый тип двухрежимного четвероногого робота
- Рубцов И.В., Нестеров В.Е., Рубцов В.И. Современная зарубежная военная микро- и мини-робототехника // Микросистемная техника. - 2000. - №3. - С. 36-42.
- Fujii A, Ishiguro A, Otsu K, …, Evolutionary creation of an adaptive controller for a legged-robot // Adaptive Motion of animals and Machines. - Montreal, Canada, 2000.
- Luo Qingsheng, Luo Xiao. Bionic quadruped robot technology. - Beijing: Beijing Institute of Technology, 2016. - P. 15-30.
- Chang Qing, Han Baoling, Luo Qingsheng. Theories and methods of steering and oblique motion planning for quadruped robots // Journal of Beijing Institute of Technology. - 2015. - №35 (5). - P. 1-2.
- Arikawa K., Hirose S. Development of quadruped walking robot TITAN-VIII // Proceedings of IEEE/RSJ International Conference on Intelligent Robots and Systems. IROS '96, Osaka, Japan, 1996, pp. 208-214.
- Wang J, Lu K, Xu S, et al. Research situation and prospect on quadruped walking robot // Manuf Autom. - 2009. - №2 (1). - P. 4-6.
