О локальных бифуркациях дифференциальных уравнений второго порядка с кусочно-гладкой правой частью

Автор: Ройтенберг В.Ш.
Журнал: Вестник Бурятского государственного университета. Математика, информатика @vestnik-bsu-maths
Рубрика: Функциональный анализ и дифференциальные уравнения
Статья в выпуске: 4, 2023 года.
Бесплатный доступ
В работе рассматриваются динамические системы на плоскости, задаваемые автономными дифференциальными уравнениями второго порядка, с правыми частями, зависящими от одного и двух параметров, разрывными на «линии нулевой скорости» у = 0 и гладкие вне нее. При нулевых значениях параметров предполагается, что начало координат является устойчивым положением равновесия, «сшитым» из фокусов гладких динамических систем, заданных в верхней и нижней полуплоскостях. Описаны бифуркационные диаграммы для типичных однопараметрических и двухпараметрических семейств таких систем. В частности, показано, что в однопараметрическом семействе из положения равновесия может родиться единственный (устойчивый) предельный цикл, а в двухпараметрическом семействе из положения равновесия - от одного до двух предельных циклов.
Дифференциальное уравнение второго порядка, фазовая плоскость, кусочно-гладкая динамическая система, положение равновесия, бифуркационная диаграмма, предельный цикл
Короткий адрес: https://sciup.org/148327594
IDR: 148327594 | УДК: 517.925 | DOI: 10.18101/2304-5728-2023-4-3-13
On local bifurcations of second order differential equations with a piece-smooth right-hand side
The paper considers dynamical systems on the plane, given by second-order autonomous differential equations, with right-hand sides depending on one and two parameters, discontinuous on the “zero velocity line” y = 0 and smooth outside it. At zero values of the parameters, it is assumed that the origin of coordinates is a stable equilibrium "linked" from the foci of smooth dynamical systems specified in the halfplanes y 0. Bifurcation diagrams are described for generic one-parameter and two-parameter families of such systems. In particular, it is shown that in a one-parameter family, a single (stable) limit cycle can be born from the equilibrium, and in a two-parameter family, from one to two limit cycles can be born from an the equilibrium.
Текст научной статьи О локальных бифуркациях дифференциальных уравнений второго порядка с кусочно-гладкой правой частью
Бифуркации положений равновесия в типичных однопараметрических и двухпараметрических семействах кусочно-гладких динамических систем на плоскости, при которых рождаются периодические траектории, в основном описаны [1–6]. Естественно исследовать такие бифуркации и в более узких классах кусочно-гладких динамических систем, представляющих интерес для приложений.
Будем рассматривать семейство дифференциальных уравнений второго порядка fp : x = f (x, x, Ц), зависящих от n -мерного параметра ц, и соответствующее семейство динамических систем x = У, y = f(x, y, ц), (1)
которые также будем обозначать f . Будем предполагать, что f ( x , у , ц ) определена в некоторой окрестности ( - 1 , 1 )2 х ( - ц , ц ) n нуля в пространстве R 2 х R n переменных ( x , у , ц ), а фазовое пространство Ф = ( - 1 , 1 )2 разбивается линией 5 : у = 0 на множества Ф + : {( x , у ) еФ : у > 0} и Ф _ :{( x , у ) еФ : у < 0}. На множестве Ф ± х ( - ц , ц ) n функция f совпадает с C -функцией f ± , определенной на ( - 1 , 1 )2 х ( - ц , ц ) n ( r > 2).
В точках ( x 0 ,0) е 5 , где f - ( x 0 ,0,0) f + ( x 0 ,0,0) < 0 траектории динамических систем f ц «сшиваются» из дуг траекторий динамических систем f p : x = у , у = f ± ( x , у ,0), ( x , у ) еФ ± , и являются C 1 -гладкими. В точках ( x 0,0) е 5 , где f - ( x 0,0,0) f + ( x 0,0,0) > 0 , будем использовать выпуклое доопределение на 5 [1, с. 95]. Поскольку вектор из выпуклой оболочки векторов (0, f ± ( x 0,0,0)), касательный к 5 , является нулевым, то точку ( x 0,0) будем считать целой траекторией — положением равновесия.
Опишем бифуркации в окрестности особой точки (0,0) еФ в «типичных» семействах уравнений, зависящих от одного и двух параметров, при которых рождаются предельные циклы.
Вследствие (2)-(3) дуга S между точками O - ( ц ) и O + ( ц ) состоит из положений равновесия, устойчивых при x + ( ц ) < x - ( ц ) и неустойчивых при x - ( ц ) < x + ( ц ).
При достаточно малом р0> 0 найдется такое ц'е (0, ц,), что Vце (-ц',ц')n x±(ц) е (-р0,р0), а положительная (отрицательная) полутраектория системы /ц (f- ), начинающаяся в точке (р, 0) е S, ре[-р0,р0], следующий раз пересекает S в точке (g + (р,ц),0) ((g- (р, ц),0)), где g±е Cr, (g±)р (р, ц) < 0, g± (x± (ц), ц) = x± (ц) [7, с. 252]. Пусть g-’(•, ц) — функция, обратная к функции g- (•, ц). Введем функ- цию d(р,ц):= g + (р,ц) - g-(р,ц), (р,ц) е (-р0,р0) х(-ц',ц')n.
Мы можем выбрать р 0 е (0, р0 ] и 50 е (0, ц'] так, чтобы ^це (-50,80) n x ± (ц) е (- р0, р0), g + (р, ц) е (- р 0, р0), если ре (- р0, р0). Тогда функция P (•, ц ):= g:’(g + (•, ц), ц), определенная на отрезке [-р0, x (ц)], где x(ц) := min{x + (ц),x-(ц)}, является функцией последования по траекториям системы /ц . Пусть р, е (-р0, x(ц)) — неподвижная точка функции последования: P(р,, ц) = р,. Тогда через точку S с координатой x = р, проходит замкнутая траектория уравнения /ц . При рр(р,, ц) < 1 (Рр(р,, ц) > 1) эта траектория является устойчивым (неустойчивым) ги- перболическим предельным циклом, а при рр( р,, ц) = 1,
Р рр ( р , , ц ) * 0 — двойным циклом. Так как
P ( р , ц ) = g - 1 ( g + ( р , ц ), ц ), P ( р , ц ) =—( т у- р ^- т-т, ( g - ) р ( P ( р , ц X ц )
р рр ( р , ц ) =
( g + ) "рр ( р , ц ) ( g - ) р ( Р , ц )
( g + ) р ( р , ц )( g - ) "р ( р ), ц ) р' р ( р , ц )
[( g - ) р ( р ), ц )]2 J р = P ( р , ц )’
P ( р , , ц ) = р , , р р ( р , , ц ) < 1( > 1) . . d ( р , , ц ) = 0, d р ( р , , ц ) > 0( < 0), (4) р р ( р , , ц ) = ( g + ) р ( р , , ц )/( g - ) р ( р , , ц ) = 1 ^ d ; ( р , , ц ) = 0,
р ( р , , ц ) = р , , р р ( р , , ц ) = 1, р рр ( р , , ц ) * 0 ^ (5)
о d ( р , , ц ) = d ; ( р , , ц ) = 0, d' Р; ( р , , ц ) * 0.
Обратно, если замкнутая траектория системы / ц пересекается с дугой ( - р 0, р 0) х {0} с S , то она проходит через точку с координатой x = р , е ( - р 0 , x ( ц )), а P ( р , , ц ) = р , .
Если d р (0,0) = ... = d ^ (0,0) = 0, ( - 1) k d ^\ }(0,0) < 0, к = 1,..., r , то все траектории уравнения f }, начинающиеся в достаточно малой окрестности точки O , го -предельны ( а -предельны) к O . В этом случае точку O будем называть устойчивым (неустойчивым) фокус-фокусом системы f 0 кратности k .
Из [7, с. 100-101] следует, что
( g + ) р ( х + ( ц ), ц ) = - e a ( ц )/ в+ ( ц ) , ( g - ) р ( х - ( ц ), Н ) = - е п ( ц > / в- ( ц ) . (6)
Поэтому dP(0,0) = е"”“-(0)/в— (0)(1 -епЛ(0)). (7)
-
2 Бифуркации особой точки типа фокус-фокус в однопараметрическом семействе
Здесь будем рассматривать однопараметрическое семейство f µ , ц е ( - ц , ц ) систем вида (1), где f ± е C r , r > 2 .
Теорема 1. Пусть точка O = (0,0) — фокус-фокус системы f , и Л (0) < 0 , Д‘ (0) > 0 . Тогда существуют окрестность U точки O с C 1 -гладкой границей д U и число ц 0 е (0, ц ) такие, что (рис. 1)
для любого це ( - ц 0, ц 0) траектории систем f ц в точках д U входят вU;
при це ( - ц 0,0) f ц имеет в U единственную замкнутую траекторию, являющуюся устойчивым грубым предельным циклом, к которому ω -предельны все остальные траектории, начинающиеся в U и отличные от положений равновесия на отрезке [O - ( ц ) O + ( ц )] ;
при ц = 0 все траектории системы f ц , начинающиеся в U \ O, ω -предельны к O ;
при це (0, ц 0) все траектории системы f ц , начинающиеся в U, кончаются в одном из положений равновесия на отрезке [ O + ( ц ) O - ( ц )] .
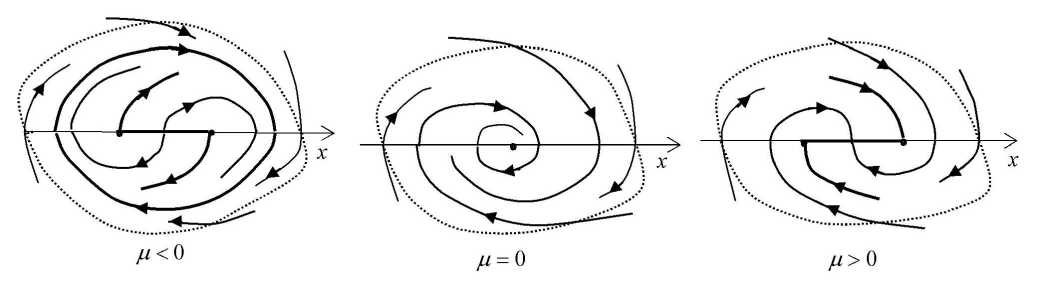
Рис. 1. Бифуркации в однопараметрическом семействе
Доказательство. Так как Л(0) < 0, то из (7) следует, что d'p (0,0) > 0,(8)
Поэтому числа р 0 и р 0 можно считать выбранными так, что
P(р,0) > р для всех р е [-ро,0),(9)
d'p (р, р) > 0 для всех - Р0 < р < x (р), ре (-Р0, Р0),(10)
Из (9) и [8, с. 100] следует, что через точку S с координатой x = P ( - р 0,0) можно провести замкнутую C 1 -кривую у , в точках которой траектории системы f , трансверсальны у и направлены внутрь области U э O , ограниченной у . При достаточно малом р 0 траектории системы f p , ре ( - р 0, р 0), в точках у = д U также направлены внутрь U , а замкнутая траектория принадлежит U тогда и только тогда, когда она пересекается с дугой S р : - р 0 < x < x ( р ) линии переключения S .
Из (9) теперь следует, что все траектории системы f , , начинающиеся в U \ O , to -предельны к O .
Из равенства d(0,0) = 0 и (8) получаем, что р0 и р0 можно взять такими, что d (-р0, р) < 0 для всех ре (-р0, р0). (11)
Поскольку А‘ (0) > 0, то можно считать, что V р е (0, р 0) x + ( р ) > x _ ( р ) и d ( x _ ( р ), р ) = g + ( x _ ( р ), р ) - x _ ( р ) > x + ( р ) - x _ ( р ) > 0 . (12)
Из (10)-(12) следует, что при ре (0, р 0) d ( • , р ) имеет единственный нуль р , ( р ), при этом d p ( р , ( р ), р ) > 0. Ввиду (4) P ( • , р ) имеет единственную, причем устойчивую неподвижную точку р , ( р ), а система f имеет единственную (устойчивую) замкнутую траекторию в U .
При ре (-р0,0) x + (р) < x _ (р) и d(x + (р), р) = x + (р) - g_(x + (р), р) < x + (р) - x_(р) < 0 . (13)
Из (10), (11) и (13) следует, что при ре ( - р 0,0) d ( • , р ) не имеет нулей. Соответственно, система f не имеет замкнутых траекторий в U .
Пусть выполняется и условие
Л ' , (0) д ^ 2 <0) -Л ' 2 (0) Д ^ 1(0) * 0.
Тогда, сделав замену параметров Д’ = Л ( д 1, д 2), д 2 = ^ ( Д о H 2) и вернувшись к их прежним обозначениям, можно считать
Л ( H i , H 2 ) = H i , Л ( H i , H z ) = H 2 . (14)
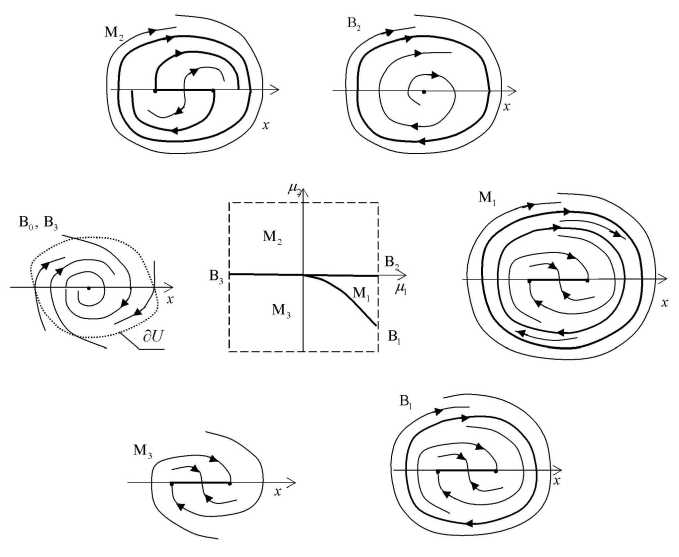
Рис. 2. Бифуркации в двухпараметрическом семействе
Теорема 2. Пусть точка O = (0,0)— устойчивый фокус-фокус уравнения f 0 кратности два , а параметры ( д 1, Д 2) выбраны так, что выполняются равенства (14). Тогда существуют окрестность U точки O с C1 -гладкой границей д U, число 5 е (0, д ) и разбиение области параметров ( -5 , 5 )2 на множества
В о = {0} , B 1 = { д : Д 2 = в ( H i ), в е C 4(0, 5 ),( - 5 ,0)), в ( + 0) = в ‘ ( + 0) = 0} ,
B 2 = (0, 5 ) х {0} , B 3 = ( - 5 ,0) х {0} , M i = { д : в ( H i ) < Д 2 < 0} , M 2 = ( - 5 , 5 ) х (0, 5 ) , M 3 = { д : -5 < д 2 < в ( д 1)} и ( - 5 ,0] х ( - 5 ,0) со следующими свойствами (рис. 2):
Для любого д е ( - 5 , 5 )2 траектории f H в точках д U входят в U.
Система f д , де ( - 5 , 5 )2 , имеет в U следующие особые точки: устойчивый (неустойчивый) фокус-фокус при д е В 0 иВ 3 ( д еВ 2 ); отрезок [ O - ( д ) O + ( д )] из устойчивых (неустойчивых) положений равновесия при д е В 1 и М 1 иМ 3 (при д еМ 2 );
Система f p , це ( - 8 , 8 )2 , имеет в U следующие замкнутые траектории: двойной цикл при ц еВ 1 , устойчивый и неустойчивый гиперболические предельные циклы при ц еМ , , устойчивый гиперболический предельный цикл при ц е В 2 иМ 2 .
Доказательство. Представим d(р,ц), (р,ц) е (-р0,р0) х (-80,80)2 в виде d(р, ц) = x + (ц) + a + (р, ц)(р - x + (ц)) -x_ (ц) - a_(р, ц)(р - x_(ц)), где a± — C-1 -функции, а ± (x ± (ц), ц) = (g ± )р (x ± (ц), ц), (15) и сделаем замену и = р - x_ (ц). Функция d(р, ц) преобразуется в функ- цию d (и, ц) := d(x- (ц) + и, ц) = ц2 + а+(x + (ц) + и - ц2, ц)(и - ц2) -
-
- а - ( x - ( ц ) + и , ц ) и .
Из этого равенства, учитывая (15), (6) и (14), получаем
d(и,ц) = ц2(1 - а + (0,0) + q(и,ц)) + b(ц)и + r2(и,ц),(16)
d и(и, ц) = b(ц)+(r-X(и, ц), где q е C1 и r2 е Cr,
q(0,0) = 0, r2(0,ц) = (r /(0,ц) = 0, (r^(0,0) = d^(0,0) <0,(18)
а b ( ц ) = e™™ ( ц Ув- ( ц) - e™a ( ц Ув+ ( ц) = e™- ( ц У Д- ( ц )(1 - enA( ц))
Так как Л ( ц ) = ц 1 , то
b(ц) = ц Ь1(ц), где Ъ1(-) е C 1, b1(0)< 0.(19)
Поскольку а + (0,0) = (g + )р (0,0) < 0, то 1 - а + (0,0) > 0, из (16) и (18) следует, что числа р0 и 80 можно считать выбранными так, что d 'цг (и, ц) > 0 при всех це (-80,80)2, - р0 - x - (ц) < и < min{0, ц2}. (20) Так как d. (0,0) = d.и (0,0) = 0, а из (16)-(20) имеем d и'щ(0,0) d ц1(0,0)
d и ц 2(0,0) d ц 2(0,0)
b 1 (0) q'u (0,0)
0 d ц 2 (0,0)
* 0,
то по теореме о неявной функции существуют такие числа 8 1 е (0, 8 0) и
0 < и < р - max | x ( ц )| , что для и е [ - и , и ] система уравнений ц е ( - 8 1 , 8 1 )2
d. ( и , ц ) = d. 'и ( и , ц ) = 0
имеет относительно ц = (ц1, ц2) е (-81,81)2 единственное решение ц1 = тх(и) , ц2 = m2(и) ; при этом mj(-),m2(-) е C2,
m(и ) = - [(< „ (0,0)/ 6 1 (0)] и + o ( и ) , (21)
m 2( и ) = [0,5( r 2>"(0,0)/(1 - а + (0,0))] и 2 + о ( и 2) . (22)
Чтобы р = x - ( ц ) + и было неподвижной точкой функции последования P ( • , ц ) при ц 1 = m 1 ( и ) , ц 2 = m 2( и ) , должно выполняться неравенство и < min{ m 2( и ),0} . Поскольку 6 1 (0) < 0, (г)" (0,0) < 0, 1 - а + (0,0) > 0 , то из (21) и (22) следует, что и можно считать столь малым, что при всех и е [ - й , 0] m ‘ ( и ) < 0 , а при и е [ - и , 0) m , ( и ) > 0 , и < m 2( и ) < 0 .
Функция m , ( и ) , и е [ - и , 0] , имеет обратную m 1 - 1( ц 1 ) , ц 1 е [0, 5 2] , где 5 2 = m , ( - и ) . Обозначим в ( Ц 1 ) : = m 2( m -V Ц 1 )) • Считая й достаточно малым, из (21) и (22) будем иметь - ц , < в ( Ц 1 ) < 0 для всех ц е (0, 5 2 ] и в (0) = в ' (0) = 0 .
Так как й' Рр (0,0) < 0, то и и 5 е (0, 5 2) можно выбрать так, что
Й ии ( и , ц ) < 0 для - й < и < 0, це ( - 5 , 5 )2. (23)
Отсюда и из равенств Й (0,0) = Й и (0,0) = 0 следует, что Й ( й ,0) < 0. Поэтому при фиксированном й число 5 можно выбрать столь малым, что
Й ( й , ц ) < 0 при всех це ( - 5 , 5 )2 . (24)
Из (16) и (18) следует, что 5 можно считать таким, что
Й (0, ц ) > 0( = 0) при це ( - 5 , 5 ) х (0, 5 ) (при це ( - 5 , 5 ) х {0} ). (25) Для и = ц 2 из (16) получаем
Й ( ц 2 , ц ) = ц 2 (1 - а + (0,0) + q ( ц 2, ц ) + 6 ( ц ) ц ) + r 2 ( ц 2, ц ).
Ввиду (18) r 2( ц 2, ц ) = о ( ц 2) равномерно относительно ц 1 . Следовательно, 5 можно считать выбранным столь малым, что
Й ( ц 2, ц ) < 0 при всех ц = ( ц 1 , ц 2) е (0, 5 ) х ( - 5 ,0) . (26)
Через точку 5 с координатой x = P ( - й ,0) проведем C 1 -гладкую замкнутую кривую у , трансверсальную траекториям уравнения f , и ограничивающую окрестность U точки O . Если 5 достаточно мало, то Y — трансверсаль и для траекторий уравнения f p , ц =е ( - 5 , 5 )2 , а замкнутая траектория принадлежит U тогда и только тогда, когда пересекает дугу 5 ц : - й + x - ( ц ) < x < min{0, ц 2} + x - ( ц ) линии 5 .
Определим множества B i , M j так, как это описано в формулировке теоремы 2. Учитывая (23) и (5), получаем, что при ц еВ 1 дугу 5 ц пересекает двойной цикл, а при остальных ц е ( - 5 , 5 )2 эту дугу могут пересекать только гиперболические замкнутые траектории.
Так как при ц еВ , d ( m /( ц , ), ц ) = d U ( m /( ц , ), ц ) = 0, а d"и ( и , ц ) < 0 при всех u е [ - й , 0] , то d ( и, ц ) < 0, если u * m - 1( ц , ). Тем самым при ц еВ , двойной цикл — единственная замкнутая траектория, пересекающая дугу S ц .
Вследствие (20)
d ( m , ( ц , ), ц ) > 0 при ц еМ , „В . .
Из (24), (26), (27) и (23) получаем, что при любом ц еМ , существует точка й е ( - и , ц 2) такая, что d ( ua, ц ) > 0, d U ( и , ц ) > 0 при и е ( - й , U ) и d U ( и , ц ) < 0 при и e ( U, ц 2). Поэтому d ( • , ц ) имеет один нуль на ( - й , U ) и один нуль на ( U, ц 2). Вследствие (4) дугу S ц пересекают два гиперболических предельных цикла, устойчивый и неустойчивый.
Если ц принадлежит В 2 или М 2, то из (24) - (27) и (23) получаем, что d ( • , ц ) имеет на ( - й ,0) единственный нуль и , , причем d U ( и , , ц ) > 0. Вследствие (4) дугу S - пересекает единственная замкнутая траектория — устойчивый гиперболический предельный цикл.
Если ц е (0,5), -5 < ц2 < вАц,), то ввиду (20) для любого и е [-й, 0] d(и,(ц,, ц2)) < d(и, ц,, в,( ц,)) ^ 0. Вследствие (24), (25) и простоты нулей d (•, ц) число нулей d (•, ц) на (-й,0) — локально постоянная функция на М3. В силу связности М3 число нулей d (•, ц) на (-й,0) постоянно при всех цеМ3. Поскольку d (•, ц) не имеет нулей при ц, е (0,5) , -5 < ц2 < в,(ц,), то их нет и при всех ц еМ3. Соответ ственно, замкнутые траектории не пересекаются с дугой Sц .
Покажем, что при ц еВ 3 замкнутые траектории также не пересекаются с дугой S ц . Предположим, что это не так. Тогда d ( • , ц ) имеет на ( - й ,0) простой нуль. Но тогда при ц еМ 3 и достаточно близких к ц , d. ( • , / /) тоже имеет на ( - й ,0) нуль, что невозможно. Поэтому сделанное предположение неверно и замкнутые траектории не пересекаются с S ^ .
Заключение
В работе рассмотрены семейства динамических систем на фазовой плоскости, задаваемые дифференциальными уравнениями второго порядка x = f ( x , x , ц ) с правыми частями, разрывными на линии х = 0 и зависящими от одномерного или двумерного параметра ц . В случае «общего положения» описаны бифуркационные диаграммы таких семейств, что при нулевом значении параметра система имеет устойчивое положение равновесия типа фокус-фокус. В частности, указаны области значений параметра, при которых из положения равновесия рождается устойчивый предельный цикл. Полученные результаты могут быть использованы для описания возникновения автоколебаний в реальных релейных системах управления.
Список литературы О локальных бифуркациях дифференциальных уравнений второго порядка с кусочно-гладкой правой частью
- Филиппов А. Ф. Дифференциальные уравнения с разрывной правой частью. Москва: Наука, 1985. 224 с.
- Kuznetsov Yu. A., Rinaldi S., Gragnani A. One-parameter bifurcations in planar Filippov systems // Intern. J. of Bifurcation and Chaos in Applied Sciences and Engineering. 2003. Vol. 13, No. 8. P. 2157-2188. EDN: LIAIKH
- Han M., Zhang W. On Hopf bifurcation in nonsmooth planar systems // J. Differential Equations. 2010. V. 248. P. 2399-2416.
- Guardia M., Seara T. M., Teixeira M. A. Generic bifurcations of low codimension of planar Filippov systems // J. Differential Equations. 2011. Vol. 250, No. 4. P. 19672023. EDN: OKZYZV
- Ройтенберг В. Ш. О бифуркациях в окрестности особой точки типа "сшитый трехкратный фокус" // Известия вузов. Поволжский регион. Физикоматематические науки. 2017. № 2(42). С. 18-31. EDN: ZIZWUJ
- Simpson D. J. W. A compendium of Hopf-like bifurcations in piecewise-smooth dynamical systems. arXiv: 1 894.1 109v1 [math DS]. 30 Apr. 2018. 11 p.
- Качественная теория динамических систем второго порядка /А. А. Андронов, Е. А. Леонтович, И. И. Гордон, А. Г. Майер. Москва: Наука, 1966. 568 с.
- Теория бифуркаций динамических систем на плоскости /А. А. Андронов, Е. А. Леонтович, И. И. Гордон, А. Г. Майер. Москва: Наука, 1967. 488 с.
