Об одном методе решения задачи идентификации динамических систем

Автор: Булдаев Александр Сергеевич, Хишектуева Ишин-Хорло Дамбадоржиевна, Анахин Владимир Дмитриевич, Дамбаев Жаргал Гомбоевич
Журнал: Вестник Бурятского государственного университета. Математика, информатика @vestnik-bsu-maths
Рубрика: Управляемые системы и методы оптимизации
Статья в выпуске: 4, 2020 года.
Бесплатный доступ
Для решения задачи идентификации динамических систем применяются теория и методы оптимального управления. Рассматривается новый подход к решению задачи, основывающийся на представлении условий улучшения управления в форме специальных задач о неподвижной точке операторов управления. Такое представление дает возможность применить и модифицировать теорию и методы неподвижных точек для построения релаксационных последовательностей управления в задачах оптимизации рассматриваемого класса. Предлагается алгоритм приближенного решения задачи идентификации на основе итерационных методов поиска неподвижных точек. Рассматриваемый алгоритм характеризуется свойствами нелокального улучшения управления и принципиальной возможностью строгого улучшения неоптимальных управлений, удовлетворяющих известным необходимым условиям оптимальности, в отличие от градиентных и других локальных методов. Эффективность предлагаемых методов оптимизации иллюстрируется на расчете модельной задачи.
Параметрическая оптимизация, условия улучшения управления, задача о неподвижной точке, метод оптимизации
Короткий адрес: https://sciup.org/148308968
IDR: 148308968 | УДК: 517.977 | DOI: 10.18101/2304-5728-2020-4-14-25
On one method for solving the problem of identifying dynamic systems
To solve the problem of identifying dynamic systems, the theory and methods of optimal control are applied. The article deals with a new approach to solving the problem based on representing the conditions for improving control in the form of special problems on a fixed point of control operators. This representation makes it possible to apply and modify the theory and methods of fixed points for constructing relaxation control sequences in the optimization problems of the class under consideration. We have proposed an algorithm for the approximate solution of the identification problem based on iterative methods for finding fixed points. The considered algorithm is characterized by the properties of control non-local improvement and the fundamental possibility of strictly improving non-optimal controls that satisfy the known necessary optimality conditions, in contrast to gradient and other local methods. The effectiveness of the proposed optimization methods has been illustrated by calculating a model problem.
Текст научной статьи Об одном методе решения задачи идентификации динамических систем
Известным подходом к решению задач параметрической идентификации динамических систем является сведение к задачам оптимизации параметров. Для решения возникающих задач, как правило, применяют методы конечномерной оптимизации неявно заданных целевых функций. Менее распространенным подходом является интерпретация задачи идентификации как задачи оптимального управления и применение аппарата теории и методов оптимального управления для поиска оптимальных параметров. При этом используют методы, основанные на реализации необходимых условий оптимальности управления [1] и локальные методы улучшения управления, в частности градиентные [2].
Предлагаемый в статье метод является модификацией развиваемых нелокальных методов улучшения и оптимизации управлений на основе решения конструируемых задач о неподвижной точке в пространстве управлений [3; 4] применительно к рассматриваемой задаче идентификации. Эти методы являются развитием нелокальных методов, которые были первоначально разработаны в классах линейных [5] и полиномиальных [6] по состоянию динамических систем и основывались на решении специальных задач Коши и краевых задач в пространстве состояний.
-
1 Задача идентификации
Задача идентификации динамических систем рассматривается в следующей постановке аналогично работам [1; 2].
Пусть измеряются выходные характеристики динамического объекта y ( t ) = ( У 1 ( t ),—, У, ( t )) на фиксированном интервале времени T = [ t 0, t j. Относительно объекта известна дифференциальная система уравнений движения:
x( t ) = f ( x ( t ), о , t ), x ( t o ) = a , o e W , a e A , (1) в которой x ( t ) = ( x , ( t ),..., xn ( t )) — вектор состояния, о = ( ® 1 ,..., to m ) и a = ( a^...,a n ) — векторы параметров. Множества W c Rl , A c Rn выпуклы и замкнуты.
Ставится задача определить вектор параметров с = ( о , a ) со значениями в множестве Q = W х A , при котором заданная функция Ф ( с ) от параметров, характеризующая меру близости решений системы (1) x ( t ) = x ( t, с ), t e T к функции y ( t ) = ( y 1 ( t ),..., ys ( t )), t e T , принимала наименьшее значение:
Ф ( о ) = [ F ( x ( t ), y ( t )) dt = [ F ( x ( t ), t ) dt ^ inf . (2)
T
T
σ ∈ Ω
n
F ( x , У ) = Е X ( x - У ‘ ).
i = 1
Отметим актуальный для приложений случай, в котором задача идентификации (1), (2) находит важное применение.
При моделировании многих задач математической физики возникает проблема поиска их решений, обусловленная большой размерностью и сложностью моделируемых систем дифференциальных уравнений. Известным подходом к исследованию таких задач является упрощение модели, сводящееся к замене исходных дифференциальных уравнений более простыми уравнениями меньшей размерности. Задачу упрощения и понижения размерности системы дифференциальных уравнений можно сформулировать в следующей постановке аналогично работам [1; 2].
По известной выходной характеристике y ( t ) = ( y 1( t ),..., ys ( t )) заданной системы дифференциальных уравнений:
y ( t ) = 7 ( У ( t X t ), У ( t 0 ) = У 0
требуется определить параметры системы (1) при n < s , для которой заданная функция (2), характеризующая близость решений систем, принимает наименьшее значение.
Таким образом, задачу упрощения и понижения размерности дифференциальной системы можно рассматривать как частный случай задачи идентификации (1), (2).
-
2 Метод неподвижных точек
Задача (1), (2) рассматривается как задача оптимального управления при следующих предположениях.
Функции f ( x , о , t ), F ( x , t ) и их частные производные по переменным x и ω непрерывны по совокупности аргументов на соответствующих множествах Rn х W х T и Rn х T . Функция f ( x , о , t ) удовлетворяет условию Липшица по x в Rn х W х T с константой L > 0: II 7 ( x , о , t ) - 7 ( У , о , t )|| < L ||x - У 11 .
Условия гарантируют существование и единственность решения x ( t , < 7 ), t е T системы (1) для любого допустимого управления о еО .
Функция Понтрягина с сопряженной переменной ψ ∈ Rn и стандартная сопряженная система в задаче (1), (2) принимают следующий вид:
H ( ^ , x , о , t ) = ( ^ , 7 ( x , о , t )) - F ( x , t ),
-
Ч & ( t ) = — H x ( V ( t ), x ( t ), о , t ), t е T , ^ ( t i ) = 0. (3)
Для допустимого управления о eQ обозначим ^ ( t , о ), t е T - решение стандартной сопряженной системы (3) при x ( t ) = x ( t, о ) и аргументе to , соответствующему вектору о . Обозначим частное приращение произвольной вектор-функции g ( yx,..,yt ) по переменным y s , ys :
А ys , +А ys , . ys 2 +A ys 2 g ( y 1 ’"'’ y ) =
= g ( y i ,-, y s , +A y s , ,-, y s 2 +A y s 2 ,-, yi ) - g ( y i ,-, yi )
Рассмотрим задачу улучшения управления в следующей общей постановке:
для заданного управления σ I ∈ Ω требуется найти управление σ ∈ Ω с условием А о Ф ( о 7 ) = Ф ( о ) - Ф ( о 7 ) < 0 .
В соответствии с работой [4] определим модифицированную дифференциально-алгебраическую сопряженную систему в форме:
p ( t ) = - H x( P ( t ), x ( t ), to , t ) - r ( t ), P ( t l ) = 0, (4)
(Hx ( P ( t )> x ( t )> to - t ) + r ( t )> y ( t ) — x ( t )) = A y ( t ) H ( P ( t )> x ( t )> to - t ) , (5)
в которой по определению полагаем r ( t ) = 0 в случае линейности функций F , f по x (линейная по состоянию задача (1), (2)), а также в случае y ( t ) = x ( t ) при соответствующих t е T .
В линейной по состоянию задаче (1), (2) модифицированная сопряженная система (4), (5) в силу определения совпадает со стандартной сопряженной системой (3).
В нелинейной по состоянию задаче (1), (2) алгебраическое уравнение (5) всегда можно разрешить относительно величины r ( t ) (возможно, не единственным образом).
Для допустимых управлений о eQ , о 7 eQ обозначим p ( t , о 7 , о ), t е T — решение модифицированной сопряженной системы (4), (5) при x ( t ) = x ( t , о 7 ), y ( t ) = x ( t, о ), to = to 7 . Из определения следует очевидное равенство p ( t , о , о ) = у (t, о ), t е T .
Обозначим P Y — оператор проектирования на множество Y с R k в евклидовой норме
P y ( z ) = arg min(|| y - z ||), z e R k .
y ∈ Y
Из работы [4] следует, что для решения задачи улучшения заданного управления σ I ∈ Ω достаточно решить следующую систему уравнений относительно о = ( to , a ) при заданном параметре a > 0:
to = P w ( to1 + a j H to ( p ( t , о 7 , о ), x ( t, о ), to 7 , t ) dt + s to ), (6)
T
А ю f H ( Р ( t , ° , ° ), x ( t , ° ), ю1 , t ) dt =
T
/ \ (7)
= И H m ( p ( t , ° , ° ), x ( t, ° ), ю1 , t ) dt + s " , ю - ю
T a = Pa(a1 + ap(10,°,°)), (8)
в которой в уравнении (7) по определению полагается s ™ = 0 в случае линейности функции f по ю (линейная по параметру ю задача (1), (2)), а также для ю = ю 1 .
В нелинейной по параметру ю задаче (1), (2) уравнение (7) всегда можно разрешить относительно величины s ю (возможно, не единственным образом).
Таким образом, систему (6)-(8) всегда можно свести (возможно, не единственным образом) к приведенной системе уравнений с однозначно определенной величиной s ю .
Пусть система условий (6)-(8) имеет решение ° п = ( ю 11 , a11 ) (возможно, не единственное). Тогда имеет место оценка улучшения целевой функции:
А °" ф(°1) < - 0a р—ю । f - a aa11—a1112.
В частном случае задачи (1), (2), когда вектор начальных условий a е A не меняется и имеет заданное значение, задача улучшения управления сводится к системе уравнений (6), (7).
Структура полученных условий улучшения управления и используемая система обозначений решений фазовой и сопряженной систем в форме явной зависимости от управления позволяет интерпретировать систему уравнений (6)-(8) как задачу о неподвижной точке специального оператора управления. Это позволяет применить развитую теорию и методы неподвижных точек для эффективного поиска улучшающих управлений.
Выбирая однозначно определенные правила определения указанных выше величин r ( t ) и s ю , будем получать однозначно определенные операторы управления. Таким образом, возникают модификации предлагаемого метода неподвижных точек для улучшения управления с различными однозначно определенными операторами управления. Множества неподвижных точек возможных модификаций оператора управления позволяют сущест -венно расширить потенциал улучшения заданного управления.
Данная особенность предлагаемого подхода неподвижных точек позволяет конструировать специальные вычислительные технологии улучшения управления, в которых на каждой итерации улучшения выбирается наилучшее по определенному правилу управление. Такие технологии улучшения управления могут эффективно реализовываться с помощью параллельных вычислений на многопроцессорных компьютерах.
Выделим другую важную особенность предлагаемого метода.
Решение CT 1 eQ задачи о неподвижной точке, отличающееся от улучшаемого управления ст 1 eQ , обеспечивает строгое улучшение по целевой функции ввиду указанной ранее оценки улучшения. Это свойство позволяет методу неподвижных точек строго улучшать экстремальные неоптимальные управления ст 1 eQ , удовлетворяющие дифференциальному принципу максимума [1] в задаче (1), (2), в случае существования неподвижных точек, отличающихся от ст 1 eQ .
Метод решения задачи идентификации состоит в последовательном решении конструируемых задач о неподвижной точке для улучшения управления.
-
3 Итерационный алгоритм решения
Для численного решения задачи о неподвижной точке (6)-(8) для улучшения заданного управления ст 1 выбирается следующий итерационный процесс при k > 0 :
CT + 1 = P w ( CT + a j H m ( p ( t , CT , CT ), x ( t , CT ), CT , t ) dt + s m ),
T
A to k j H ( p ( t , CT , CT ), x ( t , CT ), CT , t ) dt = T
, jHm(p(t,CT,CT),x(t,CT), CT,t)dt + sto,CT - CT \ T ak+1' = Pa(a1 + ap(to,CT,CT)).
Задается начальное приближение итерационного процесса ст 0 eQ при k = 0.
Расчет задачи о неподвижной точке (6)-(8) осуществляется до первого улучшения исходного управления CT . Далее строится новая задача улучшения для полученного управления CT I , и расчет повторяется. Итерации улучшения управления продолжаются до тех пор, пока не выполнится условие
| Ф ( ст ") -Ф ( ст 1 )| < 8 ф ( ст 1 )| , где 8 > 0 — заданная точность расчета.
Анализ принципиальной сходимости рассматриваемого итерационного процесса к решению задачи о неподвижной точке при достаточно малых параметрах проектирования a > 0 проводится аналогично работам [4; 6] на основе известного принципа сжимающих отображений, применяемого в работе [7].
Предлагаемый метод неподвижных точек характеризуется тем, что улучшающие управления определяются решениями соответствующих задач о неподвижной точке при любом значении параметра проектирования a > 0. В частности, при достаточно малых a > 0, обеспечивающих принципиальную сходимость конструируемого итерационного процесса последовательных приближений к решению задачи о неподвижной точке.
В целом, оптимизация управлений на основе расчета конструируемых задач о неподвижной точке предлагаемым итерационным методом последовательных приближений сводится к чередующемуся решению задач Коши для фазовых и сопряженных переменных.
Эффективность предлагаемого алгоритма решения задачи идентификации иллюстрируется на расчете модельной задачи упрощения и понижения размерности дифференциальной системы уравнений.
-
4 Модельная задача «Кинетика ядерного реактора»
Рассматривается задача понижения размерности системы дифференци альных уравнений, описывающей кинетику ядерного реактора [1]: у, = 641,02у + 21,02 у 2 +141,03 у3 +120,192у 4 + +253,844у5 + 74,358у6 + 27,051у7 + 200,
у 2 = 0,0123 ( у 1 - у 2 ) , у з = 0,03 ( у 1 - у 3 ) , & 4 = 0,112 ( у 1 - у 4 ) , у = 0,301 ( у 1 - у 5 ) , у 6 = 1,149 ( у - у 6 ) , у 7 = 3,012 ( у - у 7 ) , у 1 (0) = ... = у 7 (0) = 0,25, T = [0,8].
Идентифицируемая упрощенная система имеет вид: x = w 1 x + w 2 x 2 + w 3, x 2 = w 4 x 1 + w 5 x 2 , X 1 (0) = vp x 2 (0) = v 2 , T = [0,8].
В качестве минимизируемой целевой функции, характеризующей близость решений, рассматривается среднеквадратическая ошибка:
-
8 2 2
I ( wv ) = JE ( x ( t ) - у - ( t ) )2 dt , w = ( w 1 ’-> w 5 ) , v = ( v 1 , v 2 ) . (11)
0 - = 1
Задача состоит в определении таких значений вектора параметров (w, v), при которых целевая функция (11) принимает наименьшее значе- ние.
В источнике [8] были получены следующие расчетные оптимальные значения параметров и целевой функции:
w * = - 0,1206; w * = 0,0692; w 3' = 0,1296; w * = - 0,0065; w * = 0,0294; 1 , *2 , 3 , 4 , *5 ,
-
a, a, a, a, \ /
v 1 = 0,5809; v = 0,2610; I ( w , v ) = 0,0244.
Качественный и численный анализ системы (9) показал, что система является вычислительно неустойчивой ввиду существования собственного числа, соответствующего переменной x 1 , которое имеет достаточно большую положительную вещественную часть. При численных расчетах этой системы обнаружилось расхождение между решением исходной системы (9) и идентифицируемой системы (10) с расчетными значениями параметров (12). Поэтому была поставлена и решена вспомогательная задача идентификации параметров системы (10):
y = U 1 У 1 + u 2 y 2 + u 3 y 3 + u 4 y 4 + u 5 y 5 + U 6 y 6 + u 7 y 7 + u 8 ,
Ут = 0,0123 ( y i - y 2 ) , У з = 0,03 ( y i - y 3 ) , y 4 = 0,112 ( y i - y 4 ) , (13)
y 5 = 0,301 ( y i - y 5 ) , У б = 1,149 ( y i - y 6 ) , У 7 = 3,012 ( y i - y 7 ) ,
У 1 (0) = ... = y 7 (0) = 0,25, T = [0,8].
,..., u 8),
ф ( u ) = £ Е ( y . ( t ) - z - ( t ) )2 dt ^ min, u = ( u i i = 1
где z(t) — приближенное решение, построенное следующим образом. Первые две компоненты вычисляются по модели (10) с расчетными оптимальными значениями параметров (12). Остальные компоненты восстанавливаются по уравнениям исходной модели (9) для переменных y3,..., y7.
Таким образом, z ( t ) является решением системы:
zi =-0,1206z1 + 0,0692z2 + 0,1296, z2 =-0,0065z1 + 0,0294z 2, z3 = 0,03(zi -z3), z, = 0,112(zi -z4), z5 = 0,301(zi -z5), z6 = 1,149(zi -z6), z7 = 3,012(zi -z7), T = [0,8], z1(0) = 0,5809, z2(0) = 0,2610, z3(0) =... = z7(0) = 0,25.
Для численного решения задачи идентификации (13) использовался описанный ранее метод неподвижных точек. Таким образом, были найдены следующие расчетные оптимальные значения управляющих параметров задачи (13):
ui1 = - 87,9013; u 2 = 8,0383; u3 = 13,0397; u 4 = 34,0451; u 5 = 22,0533; u6 = 27,0638; z2 7 =- 14,9313; u8 = 30,1494; Ф ( ui) = 0,00146.
В результате в качестве «понижаемой системы» рассматривалась тема (13) со значениями коэффициентов (14).
Минимизируемая целевая функция имеет вид: 82 2
ф ( w ) = JE ( x - ( t ) - y. ( t ) ) dt , w = ( w i ,..., w 5 ) .
сис-
0 1=1
Методом неподвижных точек были получены следующие расчетные значения параметров и целевой функции:
W =- 0,1102; w 2 = 0,0414; w 3 = 0,1292;
w 4 = 0,0371; w 5 =- 0,0904; Ф ( w ) = 0,0009.
На рис. 1 представлены графики траекторий переменных y 1, y 2 численного решения понижаемой системы и траекторий переменных x 1, x 2 численного решения идентифицируемой системы (15):
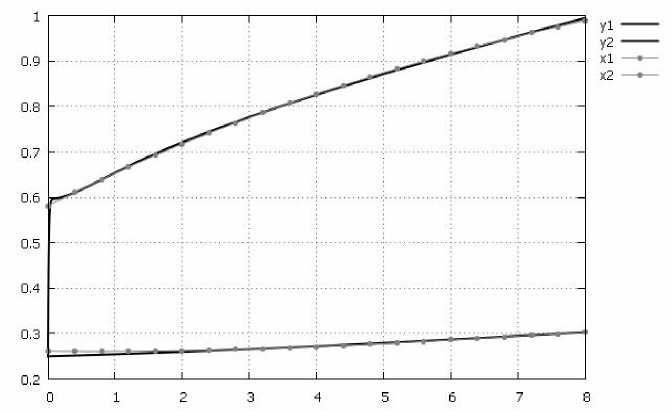
Рис. 1. y ( t ) — решение «понижаемой» системы, x ( t ) — полученное решение
Сравнительный анализ достигнутых расчетных значений целевой функции с известными данными о минимальной среднеквадратичной ошибке, полученными градиентными методами в [1], показал значительно лучшую эффективность метода неподвижных точек.
Предлагаемый метод неподвижных точек продемонстрировал в рамках расчета модельной задачи достаточно широкую область сходимости итерационного алгоритма по начальному приближению, удобство и простоту экспериментальной настройки скалярного проекционного параметра для регулирования качества и скорости сходимости итерационного процесса.
Заключение
Построенный метод неподвижных точек для улучшения управления в рассматриваемом классе нелинейных задач идентификации характеризуется свойством нелокальности, обусловленной фиксированностью параметра проектирования и отсутствием процедуры варьирования улучшающего управления в достаточно малой окрестности улучшаемого управления, характерной для градиентных методов. Предлагаемый метод обладает потенциальной возможностью строгого улучшения неоптимальных экстремальных управлений, удовлетворяющих дифференциальному принципу максимума. Такая возможность появляется в случае неединственности решения задачи о неподвижной точке. Градиентные методы такой возможностью не обладают.
Одно из основных отличий разработанного проекционного метода неподвижных точек от стандартного метода проекции градиента состоит в том, что параметр проектирования a > 0 фиксируется в итерационном процессе последовательных приближений. В методе проекции градиента этот параметр варьируется на каждой итерации приближений для обеспечения улучшения управления.
Указанные свойства предлагаемого метода неподвижных точек являются важными факторами повышения вычислительной и качественной эффективности решения задач идентификации нелинейных динамических систем и определяют перспективное направление развития методов идентификации.
Список литературы Об одном методе решения задачи идентификации динамических систем
- Габасов Р., Кириллова Ф. М. Качественная теория оптимальных процессов. М.: Наука, 1971. 508 с.
- Ащепков Л. Т., Новосельский А. В., Тятюшкин А. И. Идентификация динамических систем как задача управления параметрами // Автоматика и телемеханика. 1975. № 3. С. 178-182.
- Булдаев А. С. Хишектуева И.-Х. Д. Метод неподвижных точек в задачах параметрической оптимизации систем // Автоматика и телемеханика. 2013. № 12. C. 5-15.
- Булдаев А. С. Методы неподвижных точек на основе операций проектирования в задачах оптимизации управляющих функций и параметров динамических систем // Вестник Бурятского государственного университета. Математика, информатика. 2017. № 1. С. 38-54.
- Срочко В. А. Итерационные методы решения задач оптимального управления. М.: Физматлит, 2000. 160 с.
- Булдаев А. С. Методы возмущений в задачах улучшения и оптимизации управляемых систем. Улан-Удэ: Изд-во Бурят. гос. ун-та, 2008. 260 с.
- Самарский А. А., Гулин А. В. Численные методы. М.: Наука, 1989. 432 с.
