Операторные методы поиска вырожденных экстремальных управлений в линейных по управлению задачах оптимального управления

Автор: Булдаев Александр Сергеевич, Казьмин Иван Дмитриевич
Журнал: Вестник Бурятского государственного университета. Математика, информатика @vestnik-bsu-maths
Рубрика: Управляемые системы и методы оптимизации
Статья в выпуске: 2, 2022 года.
Бесплатный доступ
Рассматриваются новые методы поиска экстремальных управлений в классе линейных по управлению задач оптимального управления с вырожденными условиями принципа максимума. Предлагаемый подход основывается на специальных формах принципа максимума, имеющих вид операторных задач о неподвижной точке в пространстве управлений, которые эквивалентны известному условию принципа максимума в рассматриваемом классе задач оптимального управления. Рассматриваемые операторные формы условий принципа максимума позволяют получать новые эквивалентные формулировки известных условий вырожденности принципа максимума и конструировать новые алгоритмы поиска экстремальных управлений в вырожденных задачах рассматриваемого класса. Проводится сравнительный анализ эффективности новых алгоритмов для поиска экстремальных управлений на примере известной модельной задачи оптимизации квантовой системы, которая характеризуется вырожденностью принципа максимума.
Задача оптимального управления, операторные условия принципа максимума, вырожденная задача оптимального управления, итерационные алгоритмы
Короткий адрес: https://sciup.org/148325416
IDR: 148325416 | УДК: 517.977 | DOI: 10.18101/2304-5728-2022-2-23-41
Operator methods for searching degenerate extremal controls in optimal control problems linear in control
New methods of searching for extremal controls in the class of optimal control problems linear in control with degenerate conditions of the maximum principle are considered. The proposed approach is based on special forms of the maximum principle, which have the form of operator problems on a fixed point in the space of controls, which are equivalent to the well-known condition of the maximum principle in the considered class of optimal control problems. The considered operator forms of the maximum principle make it possible to obtain new equivalent formulations of the known conditions for the degeneracy of the maximum principle and to construct new algorithms for searching for extremal controls in degenerate problems of the class under consideration. A comparative analysis of the effectiveness of new algorithms for finding extremal controls is carried out on the example of a well-known model optimization problem for a quantum system, which is characterized by the degeneracy of the maximum principle.
Текст научной статьи Операторные методы поиска вырожденных экстремальных управлений в линейных по управлению задачах оптимального управления
Распространенным подходом к решению задач оптимального управления является поиск экстремального решения, т. е. удовлетворяющего необходимым условиям оптимальности. Классическим подходом является поиск решения краевой задачи принципа максимума [1-3] с общеизвестными трудностями. Альтернативный подход состоит в построении итерационных процессов улучшения управления, сходящихся в том или ином смысле к экстремальному решению. Здесь наиболее известны градиентные методы [2; 3]. В последние десятилетия активно развиваются методы нелокального улучшения управления [4].
В работах [5; 6] рассматривается новый подход к поиску экстремального решения, основывающий на представлении необходимых условий оптимальности управления в форме операторных задач о неподвижной точке в пространстве допустимых управлений. Такое представление дает возможность применить и модифицировать известные методы неподвижных точек для поиска экстремальных решений. Подход неподвижных точек для конструирования условий оптимальности и улучшения управления развивается более десяти лет для различных классов непрерывных, дискретных и дискретно-непрерывных задач оптимального управления, в том числе включающих терминальные и фазовые ограничения, смешанные управляющие функции и параметры, нефиксированное время окончания процесса управления и другие особенности.
Поиск экстремальных решений существенно усложняется в вырожденных задачах оптимального управления, в которых необходимые условия оптимальности в форме классического принципа максимума не позволяют определять экстремальные решения. В частности, метод краевой задачи принципа максимума и градиентные методы становятся не эффективными в вырожденных задачах.
В настоящей работе в классе линейных по управлению задач оптимального управления рассматриваются методы поиска экстремальных управлений, удовлетворяющих операторным формам принципа максимума в виде задач о неподвижной точке. Для рассматриваемого класса задач характерным является свойство вырожденности классического принципа максимума во многих физико-технических, эколого-экономических и других актуальных приложениях.
Целью работы является анализ рассматриваемых методов поиска вырожденных экстремальных управлений, удовлетворяющих операторным формам принципа максимума. Анализируются и сравниваются с известными понятиями условия вырожденности экстремальных управлений на основе рассматриваемых операторных форм принципа максимума. Проводится сравнительный анализ предлагаемых операторных методов принципа максимума с известными методами. Исследуется сравнительная эффективность предлагаемых операторных методов принципа максимума на модельном примере вырожденной задачи рассматриваемого класса.
1 Вырожденные экстремальные управления
Рассматривается класс линейных по управлению задач оптимального управления:
Ф(и) = ф(x(t,)) + J F(x(t),и(t),t)dt ^ inf,(1)
Tu
x(t) = f (x(t),и(t),t), x(10) = x°, и(t) e U c Rm, t e T = [t0,t1],(2)
в котором функция ф(x) непрерывно-дифференцируема на Rn, функции f (x,и,t) и F(x, и,t) непрерывно-дифференцируемы по переменной x, линейны по переменной u и непрерывны по переменной t на множестве Rn х U x T. В качестве допустимых управлений и(t) = (и 1(t),...,ит (t)) рассматривается множество V кусочно-непрерывных функций на интервале T со значениями в компактном и выпуклом множестве U c Rm. Начальное состояние x0 и интервал T фиксированы. Используется общее обозначение линейных по управлению функций f (x,и,t) и F(x, и,t) для удобства и простоты представления конструкций операторных методов принципа максимума.
Функция Понтрягина и стандартная сопряженная система с сопряженной переменной у в задаче (1), (2) соответственно представляются в следующей форме:
Н ( у , x , и , t ) = < у , f ( x , и , t ) >- F ( x , и , t ), у e R n ;
у ( t ) = - H x ( У ( t ). x ( t ). и ( t ). t ), t e T , у ( t i ) = -ф х ( x ( t ^. (3)
Обозначим x ( t , v ), t e T — решение системы (2) для допустимого управления v e V ; у ( t , v ), t e T — решение стандартной сопряженной системы (3) при x ( t ) = x ( t , v ), и ( t ) = v ( t ) .
Известное [1-4] необходимое условие оптимальности (принцип максимума) для управления и e V в классе задач (1), (2) можно записать в форме:
и ( t ) = arg max ( Ня ( у ( t , и ), x ( t , и ), и ( t ), t ), w ^, t e T . (4)
w ∈ U
С помощью отображения и *, определяемого соотношением и * (у, x, t) = argmax H (у, x, w, t), у e Rn, x e Rn, t e T, w∈U условие (4) можно представить в следующем виде:
и ( t ) = и * ( у ( t , и ), x (t , и ), t ), t e T .
Условие (4) с помощью операции проектирования можно записать в эквивалентной форме с параметром a > 0 :
и ( t ) = P U ( и ( t ) + аНи ( у ( t , и ), x ( t , и ), и ( t ), t ) ) , t e T . (5)
Определим отображение и а с параметром a > 0 на основе соотношения:
и а ( у,x , w , t ) = P U ( w + аНи ( у , x , w , t ) ) , x e R n , у e R n , w e U , t e T .
С помощью отображения u a принцип максимума в проекционной форме (5) можно записать в виде:
u ( t ) = u a (у(t , u ), x ( t , u ), u ( t ), t ), t e T .
Управление u e V , удовлетворяющее необходимым условиям оптимальности (4) и (5), называется экстремальным.
Рассмотрим функцию переключения g ( у , x , t ) = Hu ( у , x , u , t ).
Управление u e V называется вырожденным, если для этого управления существует интервал времени [ # , , 0 2 ] с T ненулевой меры, на котором выполняется условие g(у(t , u ), x ( t , u ), t ) = 0.
Для вырожденного управления условия (4) и (5) на интервале вырожденности выполняются тривиально и не могут служить для определения экстремального управления на интервале вырожденности. В этом смысле условия принципа максимума (4) и (5) вырождаются на вырожденном экстремальном управлении.
Задача (1), (2) называется вырожденной, если существует хотя бы одно вырожденное экстремальное управление.
В соответствии с работой [6] определим отображения X , Т , V * , V a , a > 0 :
X ( u ) = x , u e V , x ( t ) = x ( t , u ), t e T ,
T ( u ) = у , u e V , у ( t ) = у ( t , u ), t e T ,
V * ( у , x ) = v * , у e C ( T ), x e C ( T ), v * ( t ) = u * ( у ( t ), x ( t ), t ), t e T ,
V a ( у , x , u ) = v a , у e C (T ), x e C ( T ), u e V , v a ( t ) = u a ( у ( t ), x(t ), u (t ), t ), t e T , где C ( T ) — пространство непрерывных на T функций.
Рассмотрим оператор X * :
X * ( у ) = x , у e C (T ), где x ( t ), t e T — решение задачи Коши:
x ( t ) = f ( x ( t ), u * ( у ( t ), x ( t ), t ), t ), x ( t o ) = x 0.
Для a > 0 рассмотрим оператор X a :
Xa (у, u) = xa, у e C(T), u e V , где xa (t), t e T — решение задачи Коши:
^x ( t ) = f ( x ( t ), ua (у(t ), x ( t ), u ( t ), t ), t ), x ( 1 0 ) = x 0.
Введем оператор Т ' :
Т * ( x ) = у , x e C ( T ), где у ( t ), t e T — решение сопряженной задачи Коши:
у ( t ) = - H x ( у ( t ), x ( t ), u * ( у ( t ), x ( t ), t ), t ), у (1 1 ) = - y x ( x ( 1 1 )) .
Для a > 0 введем оператор T a :
Т a (x, u) = ya , x e C (T), u e V , где va (t), t e T — решение сопряженной задачи Коши:
V ( t ) = - H x (у ( t ), x ( t ), u a (v(t ), x ( t ), u ( t ), t ), t ), у ( 1 1 ) = -Фх ( x ( t , )) .
В соответствии с [6] следующие операторные задачи о неподвижной точке являются эквивалентными условиям принципа максимума (4) и (5):
u = V * (Т( u ), X (u)), u = V * (Т( u), X * (Т( u))),(7)
u = V * (T* (X (u)), X (u)), u = V a (T( u), X (u), u),(9)
u = V a (T( u), X a (T(u), u), u),(10)
u = V a (Ta (X (u), u), X (u), u).(11)
Вырожденность операторных форм принципа максимума (6)-(11) определяется на основе соответствующих эквивалентных поточечных форм этих условий.
Очевидно, что поточечными формами операторных принципов максимума (6) и (9) являются условия (4) и (5) соответственно, вырожденность которых определяется выше на основе функции переключения g ( у , x , t ).
Операторный принцип максимума (7) в поточечной форме имеет следующий вид:
u ( t ) = u * ( у ( t , u ), x ( t ), t ), t e T , где x ( t ), t e T является решением специальной задачи Коши:
x ( t ) = f ( x ( t ), u * ( у ( t , u ), x ( t ), t ), t ), x ( t o ) = x 0. (12)
Введем функцию переключения g 1 ( x , t ) = g( у ( t , u ), x , t ).
Если для управления u e V существует интервал времени [ У , , 0 2 ] с T ненулевой меры, на котором выполняется условие g 1 ( x ( t ), t ) = 0 , где x ( t ) является решением специальной задачи Коши (12), то это управление назовем вырожденным в смысле функции g 1 ( x , t ).
Для вырожденного управления в смысле функции g 1 ( x , t ) соотношение u ( t ) = u * ( у ( t , u ), x ( t ), t ) не может служить для определения экстремального управления, входящего в правую часть системы (12) на интервале вырожденности. В этом смысле принцип максимума (7) вырождается на таком вырожденном экстремальном управлении.
Покажем, что понятия вырожденности экстремальных управлений, удовлетворяющих условию (4) на основе функции g(у,x,t) и удовлетво- ряющих условию (7) на основе функции g1(x, t), являются эквивалентными. Имеет место следующее утверждение.
Предложение 1. Вырожденное экстремальное управление u е V на основе функции переключения g ( у , x , t ) является вырожденным экстремальным управлением на основе функции переключения g 1 ( x , t ) и наоборот. При этом соответствующие интервалы вырожденности совпадают.
Действительно, пусть экстремальное управление и е V является вырожденным на основе функции переключения g ( у , x , t ), т. е. g(у(t , и ), x ( t , и ), t ) = 0, t е [ Д 1 , Д 2] с T . В силу экстремальности управления и е V имеем и ( t ) = и * ( у ( t , и ), x ( t , и ), t ), t е T . Следовательно, функция x ( t ) = x ( t , и ), t е T удовлетворяет задаче Коши:
x( t ) = f ( x ( t ), и * ( у ( t , и ), x ( t ), t ), t ), x ( t o ) = x 0.
Отсюда получаем, g 1 ( x ( t ), t ) = g(у(t , и ), x ( t , и ), t ) = 0, t е [ 0 1 , 0 2] с T .
Обратно, пусть экстремальное управление и е V является вырожденным на основе функции переключения g 1 ( x , t ), т. е.
g j ( x ( t ), t ) = g (у( t , и ), x ( t ), t ) = 0, t е [ Д 1 , Д 2] с T , где x ( t ), t е T является решением задачи Коши (12). В силу системы (12) и условия экстремальности и ( t ) = и * ( у ( t , и ), x ( t ), t ) имеем x ( t ) = x ( t , и ), t е T . Следовательно, получаем 0 = g , ( x ( t ), t ) = g ( у ( t , и ), x ( t , и ), t ), t е [ 0 , , 0 2 ] с T .
Аналогично функция g 1 ( x , t ) определяет вырожденность поточечной формы операторного принципа максимума (10):
и ( t ) = и а ( у ( t , и ), x ( t ), и ( t ), t ) , t е T , где x ( t ), t е T является решением специальной задачи Коши:
;x ( t ) = f ( x ( t ), иа ( у ( t , и ), x ( t ), и ( t ), t ), t ), x ( 1 0 ) = x 0. (J 3)
Если для управления и е V существует интервал времени [ Д , 0 2 ] с T ненулевой меры, на котором выполняется условие g 1 ( x ( t ), t ) = 0 , где x ( t ) является решением специальной фазовой задачи Коши (J3), то это управление назовем вырожденным в смысле функции g 1 ( x , t ).
Имеет место аналогичное Предложению j утверждение.
Предложение 2 . Вырожденное экстремальное управление на основе функции g(у,x , t ), удовлетворяющее условию (5), является вырожденным экстремальным управлением на основе функции g 1 ( x , t ), удовлетворяющим условию (j0), и наоборот. При этом соответствующие интервалы вырожденности совпадают.
Определим вырожденность операторного принципа максимума (8) с соответствующей поточечной формой, имеющей вид:
и (t) = и * (у( t), x (t, и), t), t е T, где у(t), t е T является решением специальной сопряженной задачи Коши:
у ( t ) = - H x (у ( t ), x ( t,u ), u * ( у ( t ), x ( t,u ), t ), t ), у ( t J = -ф х ( x ( t 1 , u )). (14)
Введем функцию переключения g2( у ,t ) = g( у ,x ( t , u ), t ).
Если для управления u е V существует интервал времени [ 0 1 , 0 2 ] с T ненулевой меры, на котором выполняется условие g2(у(t ), t ) = 0, где у ( t ) является решением специальной сопряженной задачи Коши (14), то это управление назовем вырожденным в смысле функции g 2( у , t ).
Для вырожденного управления в смысле функции g2( у ,t ) соотношение u ( t ) = u * ( у ( t ), x ( t , u ), t ) не может служить для определения экстремального управления, входящего в правую часть системы (14) на интервале вырожденности. В этом смысле принцип максимума (8) вырождается на таком вырожденном экстремальном управлении.
Предложение 3 . Вырожденное экстремальное управление u е V на основе функции переключения g ( у , x , t ), удовлетворяющее условию (4), является вырожденным экстремальным управлением на основе функции переключения g 2( у , t ), удовлетворяющим условию (8), и наоборот. При этом соответствующие интервалы вырожденности совпадают.
Действительно, пусть экстремальное управление u е V , удовлетворяющее условию (4), является вырожденным на основе функции переключения g ( у , x , t ), т. е. g(у(t , u ), x ( t , u ), t ) = 0, t е [ 0 , , 0 2] с T . В силу экстремальности управления u е V имеем u ( t ) = u * ( у ( t , u ), x(t , u ), t ), t е T . Следовательно, функция у ( t ) = у ( t , u ), t е T удовлетворяет сопряженной задаче Коши:
у ( t ) = - H x (у ( t ), x ( t , u ), u * ( у ( t ), x ( t , u ), t ), t ), у ( 1 1 ) = - ф x ( x ( 1 1 , u )).
Отсюда получаем g 2( у ( t ), t ) = g(у(t , u ), x ( t , u ), t ) = 0, t е [ 0 1 , 0 2] с T .
Обратно, пусть экстремальное управление u е V , удовлетворяющее условию (8), является вырожденным на основе функции переключения g 2 ( у , t ), т. е. g 2 (у( t ), t ) = g (у( t ), x ( t , u ), t ) = 0, t е [^Д] с T , где у ( t ), t е T является решением задачи Коши (14). В силу сопряженной системы (14) и условия экстремальности u ( t ) = u * ( у ( t ), x ( t , u ), t ) имеем у ( t ) = у ( t , u ), t е T . Следовательно, получаем:
0 = g 2 ( у ( t ), t ) = g(у(t , u ), x ( t , u ), t ), t е [ 0 1, 0 2 ] с T .
Аналогично функция g 2( у , t ) определяет вырожденность поточечной формы операторного принципа максимума (11):
u ( t ) = u a (у(t ), x ( t , u ), u ( t ), t ) , t е T , где у ( t ), t е T является решением специальной сопряженной задачи Коши:
У ( t ) = - H x (у ( t ), x ( t , u ), u a ( у ( t ), x ( t , u ), u ( t ), t ), t ), у ( t У = -Ф х ( x ( t„u )). (15)
Если для управления u e V существует интервал времени [ 0 1 , 0 2 ] с T ненулевой меры, на котором выполняется условие g 2( у ( t ), t ) = 0, где у ( t ) является решением специальной сопряженной задачи Коши (15), то это управление назовем вырожденным в смысле функции g 2( у , t ).
Также имеет место аналогичное Предложению 3 утверждение.
Предложение 4 . Вырожденное на основе функции g(у,x , t ) экстремальное управление, удовлетворяющее условию (5), является вырожденным на основе функции g2( у ,t ) экстремальным управлением, удовлетворяющим условию (11), и наоборот. При этом соответствующие интервалы вырожденности совпадают.
Таким образом, для поиска вырожденных в классическом смысле (на основе функции переключения g(у,x , t )) экстремальных управлений, удовлетворяющих условиям классического принципа максимума (условия (4) и (5)), можно применять методы, основанные на операторных формах принципа максимума (6)-(11).
2 Операторные методы принципа максимума
Следуя работе [6], для поиска вырожденных экстремальных управлений рассмотрим итерационные процессы метода простой итерации с индексом к > 0 с заданным начальным управлением u 0 e V при к = 0 для численного решения соответствующих задач о неподвижной точке (6)-
(11):
uk+1 = V * (^( uk), X (uk)), uk+1 = V * (^( uk), X * (^( uk))),(17)
uk+1 = V* (^* (X(uk)),X(uk)),(18)
uk+1 = Va (Щ( uk), X (uk), uk), uk+1 = Va (Щ( uk), X a (^(uk), uk), uk),(20)
uk+1 = Va (Щa (X(uk),uk),X(uk),uk).(21)
Сходимость указанных итерационных процессов можно анализировать на основе известного принципа сжимающих отображений, принципа возмущений и принципа продолжения решения по параметру аналогично работам [5; 6].
Процесс (16) в поточечной форме имеет вид:
uk + 1( t ) = u * ( у ( t , uk ), x ( t , uk ), t ) , t e T . (22)
Этому процессу в пространстве управлений эквивалентно соответствует известный метод последовательных приближений Крылова — Черноусько в пространстве фазовых и сопряженных состояний для решения краевой задачи принципа максимума. Отметим, что таким образом возникает возможность анализа сходимости метода
Крылова — Черноусько с помощью анализа сходимости итерационного процесса (22).
Процесс (19) в поточечной форме имеет вид:
u k + 1( t ) = u a ( у ( t , u k ), x ( t , u k ), u k ( t ), t ) , t e T . (23)
В отличие от известного метода проекции градиента [2; 3] на каждой итерации процесса (23) не производится варьирование полученного приближения управления u k + 1( t ) с целью улучшения значения функционала Ф ( u k ). Это является существенным фактором повышения вычислительной эффективности итерационного процесса (23), оцениваемой суммарным количеством расчетных фазовых и сопряженных задач Коши, по сравнению с методом проекции градиента. Сходимость процесса (23) к экстремальному управлению можно обосновать при достаточно малых значениях параметра проектирования a > 0 аналогично [5; 6].
Процесс (17) на основе операции максимизации в поточечной форме имеет вид:
u k ( t ) = u * ( у ( t , u k ), x ( t ), t ) , t e T , где x ( t ), t e T является решением специальной задачи Коши: x ( t ) = f ( x ( t ), u * ( у ( t , u k ), x ( t ), t ), t ), x ( t o ) = x 0.
Процесс (17) в поточечной форме можно записать в неявном виде:
u k + 1( t ) = u * ( у ( t , u k ), x ( t , u k + 1), t ) , t e T . (24)
Процесс (20), являющийся проекционным аналогом процесса (17), в поточечной форме имеет вид:
u k + 1 ( t ) = u a (у ( t , u k ), x ( t ), u k ( t ), t ) , t e T , где x ( t ), t e T является решением специальной задачи Коши:
-
*( t ) = f ( x ( t ), u a ( у ( t , u k ), x ( t ), u k ( t ), t ), t ), x ( t o ) = x 0.
Процесс (20) можно также записать в неявной поточечной форме:
u k + 1( t ) = u a (у(t , u k ), x ( t , u k + 1), u k ( t ), t ) , t e T . (25)
Процесс (18) в поточечной форме имеет вид:
uk+1(t) = u* (у(t),x(t,uk),t), t e T, где у(t), t e T является решением специальной задачи Коши:
у ( t ) = - H x ( у ( t ), x ( t , u k ), u * ( у ( t ), x ( t , u k ), t ), t ), у ( t 1 ) = - ^ x ( x ( t 1 , u k )).
Поточечная форма процесса (21), являющегося проекционным аналогом процесса (18), имеет вид:
u k + 1( t ) = u a (у ( t ), x ( t , u k ), u k ( t ), t ) , t e T , где у ( t ), t e T является решением специальной сопряженной задачи Коши:
У ( t ) = - H x (у ( t ), x ( t , u k ), u a (у(t ), x ( t , u k ), u k ( t ), t ), t ) ,
-
У ( t 1 ) = -Ф x ( x ( t 1 , u k )b
В классе билинейных задач оптимального управления, в котором функция ф ( х ) линейна на R n , функции f ( х , u , t ) и F ( х , u , t ) линейны по переменной x , линейны по переменной u и непрерывны по переменной t на множестве R n х U х T , процессы (18) и (21) в поточечной форме можно соответственно также представить в неявном виде:
u k + 1( t ) = u * ( у ( t , u k + 1), x ( t , u k ), t ), t e T , (26)
u k + 1( t ) = u a (у(t , u k + 1), x ( t , u k ), u k ( t ), t ), t e T . (27)
В указанном классе билинейных задач оптимального управления неявным процессам (24) и (26) соответствуют известные [4] x -метод нелокального улучшения управления и ψ -метод нелокального улучшения управления соответственно. Проекционным неявным процессам (25) и (27) также соответствуют известные [4] проекционные нелокальные методы улучшения.
Таким образом, в классе билинейных задач оптимального управления операторные методы (18)-(21) становятся эквивалентными известным методам нелокального улучшения управления, имеющими возможность строгого улучшения экстремальных управлений, в том числе вырожденных экстремальных управлений. В работе [4] сходимость указанных методов улучшения управления анализируется по невязке принципа максимума.
В нелинейных по состоянию задачах оптимального управления (1), (2) итерационные процессы (18)-(21) не имеют известных или близких аналогов и являются принципиально новыми для поиска экстремальных управлений. При этом на каждой итерации этих процессов улучшение управления не гарантируется.
Трудоемкость реализации одной итерации процессов (16)-(21) составляет две задачи Коши. Последовательные приближения итерационных процессов (16)-(21) характеризуются нелокальностью приближений управления и отсутствием трудоемкой операции варьирования управления для удовлетворения условия строгого улучшения по функционалу. Указанные свойства итерационных процессов (16)-(21) являются важными для повышения эффективности поиска экстремальных управлений.
3 Модельный пример вырожденной задачи
Эффективность операторных методов поиска вырожденных экстремальных управлений в рассматриваемом линейном по управлению классе задач оптимального управления иллюстрируется на примере известной вырожденной модельной задачи управления системой спинов квантовых частиц [7], которая может быть представлена в следующем виде:
Ф ( и ) = 1 - Хх ( t 1 ), Lx ( t 1 )) ^ min , x 1 ( t ) = и ( t ) x 3 ( t ) + x 4 ( t ), x 2 ( t ) = x 3 ( t ) - и ( t ) x 4 ( t ), x 3 ( t ) = - и ( t ) x 1 ( t ) - x 2 ( t ), x 4 ( t ) = - x 1 ( t ) + и ( t ) x 2 ( t ),
Л a ' + b j a 1 a 2 + bb 2 0 a 1 b2 - b 1 a 2
aa + bK a 2 + b 2 a2b. - La. 0
L 1 2 1 2 2 2 2 1 2 1
0 a 2 b 1 - b 2 a 1 b + a j b 1 b2 + a 1 a 2
v a b2 - b1 a 2 0 b1b2 + a a2 b22 + a 2 y x1(0) = ^ x 2(0) = ^, x3(0) = 0, x4(0) = 0, t e T = [0, t1], t1 = 1.5.
a 1 = 0.6, b 1 =- 0.3, a 2 = 0.1, b 2 = 7054.
Вектор x ( t ) описывает состояние квантовой системы, функция
и ( t ) e U = [ - 30,30] характеризует воздействие внешним полем.
Функция Понтрягина в задаче имеет вид:
H ( v , x , и , t ) = v 1 ( ux 3 + x 4) + v 2( x 3 - ux 4) + V 3( - ux1 - x 2) + v 4( - x 1 + ux 2).
Стандартная сопряженная система записывается в виде: V1 (t) = и (t)V3 (t) + V4( t), V 2 (t) = V3 (t) - и (t)V4 (t), t e T,
V 3 ( t ) = - и ( t ) V 1 ( t ) - V 2 ( t ), V 4 ( t ) = и ( t )V 2 ( t ) - V 1 ( t ),
V 1 ( t i ) = 2( a l2 + b 12 ) x i ( t i ) + 2( a l a 2 + b 1 b 2 ) x 2 ( t i ) + 2( a l b 2 - b 1 a 2 ) x 4 ( t i ) , V 2 ( t i ) = 2( a i a 2 + b 1 b 2 ) x i ( t i ) + 2( a 22 + b 22 ) x 2 ( t i ) + 2( a 2 b 1 - b 2 a i ) x 3 ( t 1 ) , V 3( t 1 ) = 2( a 2 b 1 - b 2 a 1 ) x 2( t 1 ) + 2( b 12 + a 12 ) x 3( t 1 ) + 2( b 1 b 2 + a 1 a 2) x 4( t 1 ), V 4 ( t i ) = 2( a i b 2 - b i a 2 ) x i ( t i ) + 2( b 1 b 2 + a i a 2 ) x 3 ( t i ) + 2( b 22 + a 22 ) x 4 ( t i ) .
Условие принципа максимума (4) имеет вид: и ( t ) = и *( v ( t , и ), x ( t , и ), t ), t e T ,
'+30, g(V, x) > 0, и * (v, x, t) = ^-30, g (v, x) < 0,
g ( v , x ) = V 1 x 3 - V 2 x 4 - V 3 x 1 + V 4 x 2 .
, w e U , g ( v , x ) = 0,
Вырожденные интервалы экстремальных управлений определяются тождеством g ( v ( t , и ), x ( t , и )) = 0.
В работе [7] для расчета рассматриваемой задачи оптимального управления применялся глобальный метод Кротова, эффективность которого сравнивалась с известным градиентным методом. В качестве стартового начального приближения управления для указанных методов выбиралось управление, определяемое из физических соображений:
u ( t ) = tg (2 γ (2 t - 1.5)), t ∈ T , γ =- 1 3 arctg ( - 30) .
При этом было получено расчетное приближение экстремального управления с значением целевого функционала Ф ∗ ≈ 0.000952 . Вырожденный интервал расчетного управления равен [0.0667, t 1]. Точность вырождения условия принципа максимума в смысле равенства нулю модуля функции переключения g ( ψ , x ) на итерационных приближениях методов принималась равной значению ε v = 10 -3 .
В рассматриваемых операторных методах принципа максимума численное решение фазовых и сопряженных задач Коши осуществлялось с помощью модуля DIVPRK из библиотеки IMSL языка программирования FortranPowerStation 4.0 [8]. Данный модуль реализует метод Рунге — Кутта — Вернера (5–6) порядка точности. Значения фазовых, сопряженных и управляемых переменных запоминались в узлах заданной равномерной сетки Th с шагом дискретизации h = 10 - 5 . В промежутках между соседними узлами сетки Th значение управления принималось постоянным и равным значению в левом узле.
Итерационные процессы последовательных приближений управления осуществлялись до выполнения следующего критерия остановки:
max{Iuk+1(t) - uk(t)I,t∈Th}≤εm, где εm = 10-3 — заданная точность расчета операторной задачи о неподвижной точке.
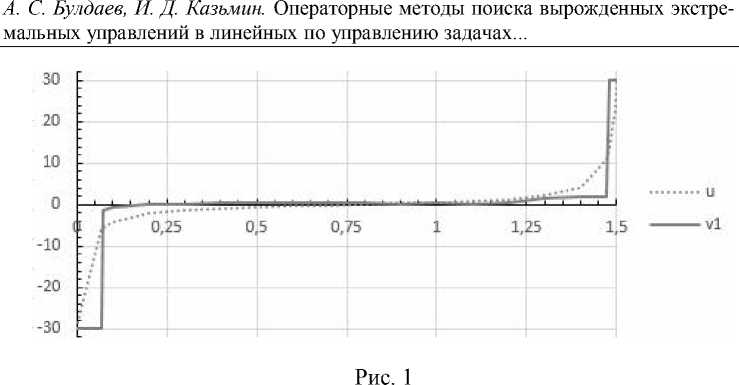
Операторный метод (16) .
Итерационный процесс (16) в поточечной форме при k ≥ 0 имеет вид: uk + 1 ( t ) = u *( ψ ( t , uk ), x ( t , uk ), t ) , t ∈ T .
Для адекватного сравнения эффективности результатов итерационного процесса (16) с результатами, полученными в [7], равенство нулю функции переключения g ( ψ , x ) на итерационных приближениях также оценивалось с точностью ε v = 10 -3 . В этом случае значение управления uk + 1( t ) на вырожденном интервале определялось по правилу дифференцирования тождества g ( ψ ( t , u ), x ( t , u )) ≡ 0 и вычисления вырожденного управления u ( t ) в силу фазовой и сопряженной систем.
На рисунке 1 представлено конечное расчетное управление v 1( t ), t ∈ T , полученное методом (16) с указанного выше начального управления u ( t ) с количеством итераций улучшения, равным 18, и значением функционала Ф ∗ ≈ 0.000989 . Вырожденный интервал конечного управления равен [0.0693, 1.4717].
Операторный метод (17) .
Итерационный процесс (17) в поточечной форме при к > 0 имеет вид: ик+1(t) = и*(^(t, ик), x(t), t), t G T , где x(t), t g T является решением специальной фазовой задачи Коши, получающейся при замене переменной управления на выражение и*(у(t, ик), x(t), t) в правой части фазовой системы.
Для адекватного сравнения эффективности результатов итерационного процесса (17) с результатами, полученными в [7], равенство нулю функции переключения g 1 ( x ) = g ( ^ ( t , ик ), x ) на итерационных приближениях также оценивалась с точностью e v = 10 -3 . В этом случае значение управления ик + 1( t ) на вырожденном интервале определялось по правилу дифференцирования тождества g 1 ( x ( t , и )) ^ 0 и вычисления вырожденного управления и ( t ) в силу фазовой системы.
На рисунке 2 представлено конечное расчетное управление v 2( t ), t g T , полученное методом (17) с указанного выше начального управления и ( t ) с количеством итераций улучшения, равным 24, и значением функционала Ф * ® 0.000552 . Вырожденный интервал конечного управления равен [0.0857, 1.4463].
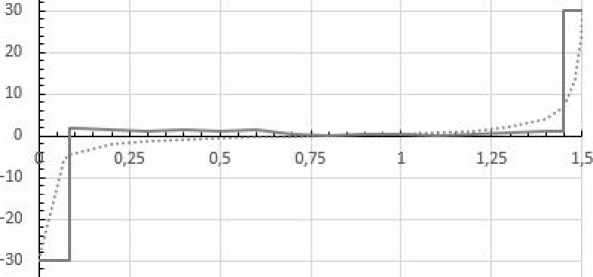
Рис. 2
Проекционный операторный метод (19).
Для заданного a > 0 итерационный процесс (19) в поточечной форме при k > 0 принимает вид:
uk + 1 ( t ) = P U ( uk ( t ) + ag(у(t , uk ), x ( t , uk ))), t e T.
На рисунке 3 представлено конечное расчетное управление v 3( t ), t e T , полученное методом (19) с указанного выше начального управления u ( t ) при a = 10 - 2 с количеством итераций улучшения, равным 14, и значением функционала Ф * ® 0.001421 . Вырожденный интервал конечного управления в смысле функции g(у, x ) равен [0.0698, 1.4609].
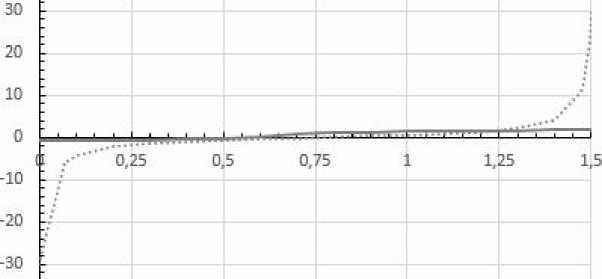
Рис. 3
Проекционный операторный метод (20).
Для заданного a > 0 итерационный процесс (20) в поточечной форме при k > 0 принимает вид:
uk+1(t) = Pu (uk (t) + ag(у(t,uk),x(t))), t g T, где x(t), t g T является решением специальной фазовой задачи Коши, получающейся при замене переменной управления на выражение PU (uk (t) + ag(у(t,uk),x(t))) в правой части фазовой системы.
На рисунке 4 представлено конечное расчетное управление v 4( t ), t g T , полученное методом (20) с указанного выше начального управления u ( t ) при a = 10 - 2 с количеством итераций улучшения, равным 26, и значением функционала Ф * ® 0.000704 . Вырожденный интервал конечного управления в смысле функции g 1( x ) равен [0.0751, 1.4512].
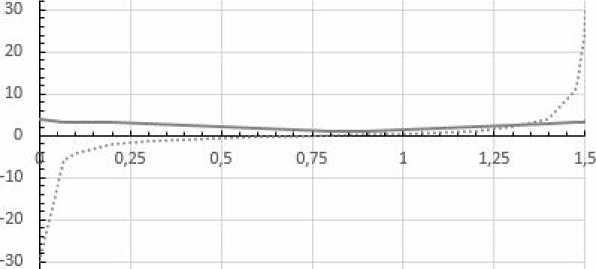
Рис. 4
Проекционный операторный метод (21) .
Для заданного a > 0 итерационный процесс (21) в поточечной форме при k > 0 принимает вид:
uk+1(t) = Pu (uk (t) + ag(у(t),x(t,uk))), t G T, где у(t), t g T является решением специальной сопряженной задачи Коши, получающейся при замене переменной управления на выражение PU(uk(t) + ag(у(t),x(t,uk))) в правой части сопряженной системы и переменной x(t1) на выражение x(t1, uk) в правой части начального условия в момент времени t1 .
На рисунке 5 представлено конечное расчетное управление v 5( t ), t g T , полученное методом (21) с указанного выше начального управления u ( t ), c a = 10 - 2 и с количеством итераций улучшения, равным 17, и значением функционала Ф * ® 0.000676 . Вырожденный интервал конечного управления в смысле функции переключения g 2( V ) = g(V,x ( t , u k )) равен [0.0799, 1.4485].
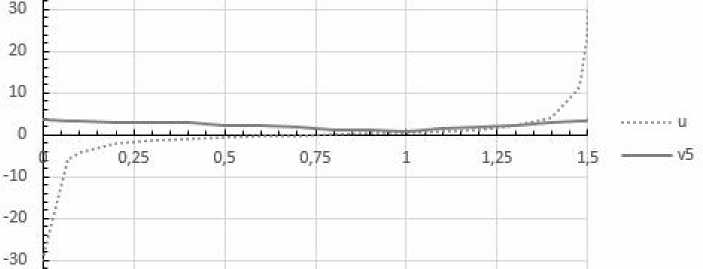
Рис. 5
Комбинированный операторный метод
В отличие от оптимального управления расчетные приближения экстремального управления, полученные проекционными операторными методами, не принимают граничных значений управления вне интервалов вырожденности управления. Поэтому указанные расчетные приближения в целях лучшего приближения к оптимальному управлению можно уточнять операторными методами на основе операции максимизации, позволяющими получать граничные значения управления вне интервалов вырожденности.
На рисунке 6 представлено конечное расчетное управление v 6( t ), t g T , полученное методом (17) с указанного выше расчетного управления v 5( t ), t g T , полученного проекционным методом (21), при a = 10 - 2 с количеством итераций улучшения, равным 3, и значением функционала Ф * ® 0.000598 . Вырожденный интервал конечного управления равен [0.0799, 1.4485].
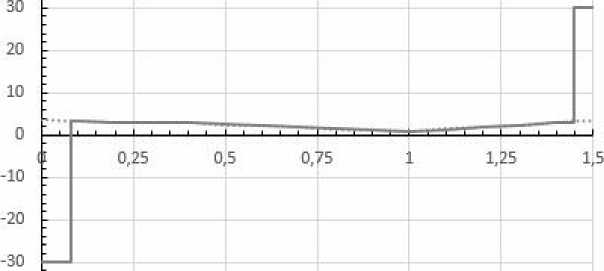
Рис. 6
В результате получаем, что вырожденные интервалы расчетных управлений v 5 и v 6 совпадают и на вырожденном интервале уточненное расчетное управление v 6 практически не отличается от расчетного приближения v 5 экстремального управления, полученного проекционным методом.
Проведенные расчеты в рамках модельной задачи показывают высокую эффективность рассматриваемых операторных методов принципа максимума для поиска вырожденных экстремальных управлений, позволяющих получать лучшие значения критерия оптимальности по сравнению с известным глобальным методом Кротова. При этом существенно более простой в вычислительной реализации проекционный операторный метод по сравнению с операторным методом на основе операции максимизации позволяет достаточно точно рассчитывать вырожденные интервалы экстремальных управлений.
Заключение
В классе нелинейных задач оптимального управления на основе рассматриваемых операторных форм принципа максимума рассмотрены модельно-ориентированные итерационные алгоритмы, позволяющие находить вырожденные экстремальные управления.
Разработанные операторные методы поиска вырожденных экстремальных управлений характеризуются следующими свойствами:
-
1) нелокальность последовательных приближений управления на каждой итерации, получаемых расчетом двух задач Коши для фазовых и сопряженных переменных;
-
2) численное решение задач Коши без определения специальных вспомогательных функций переключения Кротова на каждой итерации в отличие от известного глобального метода Кротова ;
-
3) вычислительная устойчивость, которой не обладают стандартные методы решения краевой задачи принципа максимума;
-
4) отсутствие трудоемкой процедуры игольчатого или выпуклого варьирования управления в малой окрестности рассматриваемого приближения, свойственной градиентным методам.
Указанные свойства предлагаемых операторных методов являются важными для повышения эффективности поиска вырожденных экстремальных управлений в рассматриваемом классе линейных по управлению задач оптимального управления.
Список литературы Операторные методы поиска вырожденных экстремальных управлений в линейных по управлению задачах оптимального управления
- Математическая теория оптимальных процессов / Л. С. Понтрягин, В. Г. Болтянский, Р. В. Гамкрелидзе, Е. Ф. Мищенко. Москва: Наука, 1976. 392 с. Текст: непосредственный.
- Васильев Ф. П. Численные методы решения экстремальных задач. Москва: Наука, 1980. 518 с. Текст: непосредственный.
- Васильев О. В. Лекции по методам оптимизации. Иркутск: Изд-во ИГУ, 1994. 340 с. Текст: непосредственный.
- Срочко В. А. Итерационные методы решения задач оптимального управления. Москва: Физматлит, 2000. 160 с. Текст: непосредственный.
- Булдаев А. С. Методы возмущений в задачах улучшения и оптимизации управляемых систем. Улан-Удэ: Изд-во Бурят. гос. ун-та, 2008. 260 с. Текст: непосредственный.
- Булдаев А. С. Операторные уравнения и алгоритмы принципа максимума в задачах оптимального управления // Вестник Бурятского госуниверситета. Математика, информатика. 2020. № 1. С. 35-53. Текст: непосредственный.
- Батурина О. В., Моржин О. В. Оптимальное управление системой спинов на основе метода глобального улучшения // Автоматика и телемеханика. 2011. № 6. С. 79-86. Текст: непосредственный.
- Бартеньев О. В. Фортран для профессионалов. Математическая библиотека IMSL. Москва: Диалог-МИФИ, 2001. Ч. 3. 368 с. Текст: непосредственный.
