Определение локации в корпоративных Wi-Fi сетях

Автор: Малодушев Сергей Викторович, Рогов Александр Александрович
Рубрика: Программирование
Статья в выпуске: 1 т.9, 2016 года.
Бесплатный доступ
В статье рассмотрены существующие алгоритмы расчета локации, модели распространения радиосигнала внутри помещений, а также существующие ограничения, связанные с их применением для решения задачи локализации внутри помещений. Предложен способ для расчета локации в корпоративных Wi-Fi сетях с динамически меняющимися характеристиками на основе данных об уровне сигнала, регистрируемого базовыми станциями. Данный способ не требует предварительной настройки и калибровки мобильных устройств, что позволяет использовать его при отсутвии сервисов локации. Такая особенность предлагаемого способа решения не накладывает каких-либо ограничений на его применение в любой Wi-Fi сети, где базовые станции способны регистрировать данные об уровне сигнала мобильных устройств. Локация мобильного устройства определяется относительно отрезка, соединяющего две базовые станции. Количество базовых станций для расчета локации должно быть не менее двух. Критерии выбора соответствующего отрезка также описаны в данной работе. В основу предложенного метода положена модель, рекомендованная Международным союзом электросвязи (ITU-R 1238) для определения потерь мощности сигнала внутри зданий и помещений. В статье приведены результаты экспериментов по расчету локации мобильных устрйств.
Алгоритмы локации, динамические характеристики
Короткий адрес: https://sciup.org/147159359
IDR: 147159359 | УДК: 004.021 | DOI: 10.14529/mmp160107
Determination of locations in corporate Wi-Fi networks
First of all, the article examines three issues: the existing algorithms for localizing mobile devices; indoor wireless propagation models; and limitations of applying these algorithms and models to mobile device localization. Secondly, it suggests a method for localizing mobile devices within corporate Wi-Fi networks with dynamic properties. The method is based on the ITU R 1238 indoor radio path loss model. Mobile devices are localized through their signal level registered by base stations. The localization is performed relative to the edge connecting two base stations. This is why such localization requires a minimum number of base stations. The criteria for selecting the necessary edge are described in the article. Previous settings and calibration of mobile devices are not required. For this reason, the method can be used without location-based services. Furthermore, it is applicable to any Wi-Fi networks whose base stations can measure the signal level of mobile devices. The tests show that the method successfully localizes mobile devices in a number of cases.
Текст научной статьи Определение локации в корпоративных Wi-Fi сетях
В системах локального позиционирования используются различные модели и алгоритмы для определения позиции мобильного устройства. Большинство решений основаны на наличии информации о характеристиках как базовых станций, так и мобильных устройств. В основном, алгоритмы определения позиции мобильного устройства. не учитывают возможности динамического изменения характеристик базовых станций, а. также предполагают однотипность мобильных устройств, что не характерно для корпоративных Wi-Fi сетей. В данной работе рассмотрены существующие методы определения позиций мобильных устройств, модели распространения радиосигнала, исследована, проблема, определения позиций мобильных Wi-Fi устройств в случае, когда, их характеристики не известны, но при этом могут быть различного типа, а. базовые станции могут динамически изменять свои свойства, такие как несущая частота, и выходная мощность. Предлагаемый нами способ позиционирования позволяет определять возможные позиции мобильных устройств путем сравнения значений мощности сигнала, регистрируемых базовыми станциями как от мобильных устройств, так и от соседних базовых станций. В основу предлагаемого способа, положена модель, рекомендованная Международным союзом электросвязи (ITU-R 1238) для определения потерь мощности сигнала внутри зданий и помещений. Результаты экспериментов подтверждают возможность применения данной модели для решения задачи определения локации в Wi-Fi сетях.
1. Анализ проблемы
В статье рассматривается проблема определения месторасположения мобильного устройства в Wi-Fi сетях. Наибольшую сложность в неподготовленных для локализации Wi-Fi сетях составляет динамика изменения свойств таких сетей и недостаточное для локализации количество базовых станций. Примером беспроводной сети с динамически меняющимися свойствами может выступать любая корпоративная Wi-Fi сеть, базовые станции которой способны менять несущую частоту и выходную мощность сигнала, а мобильные устройства не однотипны. Так как мобильные устройства в Wi-Fi сетях могут меняться очень часто, например, посетители торгового центра, то будем рассматривать проблему, основываясь на предположении, что мобильные устройства не настроены на работу с сервисами локального позиционирования (LBS - Location Base Services). В большинстве случаев основными параметрами, посредством которых возможно определить их вероятное местонахождение и которые регистрируются базовыми станциями, являются:
-
• Мощность сигнала (RSS - Recived Signal Strength);
-
• Точка подключения - базовая станция, к которой подключен беспроводной клиент.
В современных системах локального позиционирования для уточнения локации часто используются встроенные сенсоры, такие как акселерометр, магнитометр и гироскоп. Посредством встроенных сенсеров формируется траектория движения мобильного объекта [1]. В массовом производстве не все Wi-Fi устройства оснащены необходимыми сенсерами. Существует множество научных работ, посвященных локации в Wi-Fi сетях, в большинстве из которых рассматриваются следующие алгоритмы и методы:
-
• метод ближайших соседей (KNN - К-Nearest Neighbor);
-
• метод ближайших соседей с учетом весов (WKNN - Weighted KNN);
-
• центроид (Centroid):
-
• центр масс (Weighted Centroid);
-
• метод радиоотпечатков или сопоставление с образцом (Fingerprinting);
-
• латерация (Lateration);
-
• дифференциальная латерация (Differential lateration).
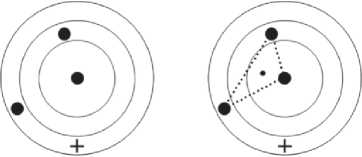
Целью поиска в методе ближайших соседей (KNN - К-Nearest Neighbor) являются к ближайших объектов по отношению к текущей предполагаемой геопозиции. Он используется в системах геолокации, например, google-карты. Локация мобильного объекта может быть определена на основании точно известной геопозиции ближайших объектов (POI - Point of interest), представляющих наибольший интерес для LBS. При использовании алгоритма KNN возможной локацией является некое предполагаемое пространство, в пределах которого находится мобильный объект [2]. Принцип работы метода ближайших соседей представлен на рис. 1А. Мобильный объект находится в области слышимости всех базовых станций, ввиду чего окружность с наибольшим радиусом представляет предполагаемую область локации. Основной недостаток данного метода - низкая точность.
а в
4- ■ Фактическая позиция • - Локация объекта
♦ - Базовая станция .....Область локации
Рис. 1. Принцип работы методов KNN и Centroid
Метод Centroid является модификацией метода ближайших соседей и при одинаковых входных данных представляет более точную информацию о местонахождении мобильного устройства. Принцип работы данного метода показан на рис. 1В. Область предполагаемой локации сокращается до геометрической фигуры, которую образуют базовые станции, при этом позицией мобильного объекта считается взвешенный центр масс полученной фигуры [3]. Один из недостатков данного метода заключается в том, что мобильный объект в действительности может находиться за пределами обозначенной геометрической фигуры.
Оба рассмотренных метода имеют расширения в виде методов WKNN и Weighted Centroid, использующих дополнительные весовые критерии. В Wi-Fi сетях в качестве весовых критериев выступают значения RSS, регистрируемые либо на стороне мобильного устройства, либо на стороне базовых станций. При использовании WKNN позицией мобильного объекта считается позиция базовой станции с наибольшим значением RSS. В случае использования центра масс координаты мобильного устройства рассчитываются по формуле [3]:
N
X 0 = ^T^ i X i , i =1
N
Y ) = ^T^ i Y i , i =1
“ Pp ‘ I P)
В данном случае характеристикой веса является значение ^ i , соответствующее регистрируемым значениям RSS. Значения X о и Y 0 соответствуют координатам мобиль ного устройства. X i 11 Y i - кооряппаты г -п базовой станции.
Метод радиоотпечатков обладает более высокой точностью в сравнении с методами WKNN и Weighted Centroid. Этот метод предполагает работу с радиокартами и основан на сравнении значений RSS в текущей позиции со значениями, хранимыми в радиокартах. Метод делится на две фазы:
-
• фазу обучения (оффлайн);
-
• фазу локализации (онлайн).
На фазе обучения в определенных опорных точках формируются вектора значений RSS от каждой базовой станции (радиоотпечатки), на основе которых создаются радиокарты. На фазе локализации определяется позиция мобильного устройства посредством сопоставления текущих показаний RSS от базовых станций со значениями, хранимыми в радиокартах. Для сопоставления применяется модифицированный метод ближайших соседей, рассмотренный авторами в работе [4]. В своей работе авторы исследуют различные метрики определения расстояния:
-
• Евклидову метрику;
-
• Манхэттенское расстояние;
-
• метрику Чебышева.
Наилучшего результата авторам удалось достигнуть при использовании Манхэттенского расстояния. Средняя ошибка позиционирования составила 1,49 м, максимальная - 4,89 м.
С целью достижения наибольшей точности позиционирования, плотность размещения базовых станций в системах локального позиционирования должна быть выше, чем в обычных Wi-Fi-сетях [5], ввиду чего количество хранимых радиокарт будет большим, а их обработка ресурсоемкой. Значения RSS, регистрируемые различными типами устройств в одних и тех же координатах, будут иметь различное усреднение - эта проблема также оказывает существенное влияние на точность локации и может быть решена путем введения дополнительной фазы калибровки [6], что еще больше усложняет эксплуатацию систем локального позиционирования, основанных на методе радиоотпечатков. В работе [7] авторами рассматривается такая проблема использования метода радиоотпечатков как недостаточность показаний RSS, регистрируемых мобильными устройствами. Причиной этого является слабая чувствительность приемной антенны мобильного устройства в сравнении с эталонным устройством, посредством которого создавались радиокарты.
Таким образом, метод радиоотпечатков в большинстве случаев не применим для решения обозначенной в статье проблемы, так как для локализации мобильных объектов требуется их однотипность, а также достаточное количество измерений RSS. Одним из основных недостатков использования метода радиоотпечатков является ресурсоемкая фаза обучения. В случае изменения конфигурации базовых станций потребуется повторное создание радиокарт, что усложняет эксплуатацию подобных систем локации.
Метод латерации предполагает преобразование фиксируемых значений RSS в расстояния с помощью модели распространения радиосигнала и дальнейшее определение позиции мобильного объекта посредством полученных растояний. Данный метод иногда называют методом трилатерации, так как для определения позиции мобильного объекта требуется зафиксировать значения RSS не менее, чем от трех базовых станций. Принцип работы метода трилатерации представлен на рис. 2.
В работе [3] авторами рассматривается круговая (см. рис. 2) и гиперболическая латерации. Гиперболическая латерация основана на разнице расстояний между мобильным устройством и базовыми станциями, т.е. для применения данного метода требуются значения показаний RSS, регистрируемых как мобильным клиентом, так и базовой станцией, либо непосредственно измеренные расстояния обеими сторонами.
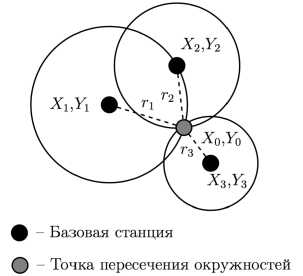
Рис. 2. Принцип работы метода Lateration
Для решения обозначенной в статье проблемы метод гиперболической латерации в большинстве случаев не применим. Метод круговой латерации может быть использован в случае, если три и более базовых станций могут единовременно регистрировать показания RSS от мобильного клиента, либо непосредственно осуществлять замеры расстояний до мобильного объекта (в массовом производстве Wi-Fi-устройства не измеряют расстояния). Зная расстояния r i до базовых станций, координаты мобильного объекта можно вычислить с помощью следующей системы уравнений [8]:
r 1 — r 2 — r 2 —
( X 1 - X 0)2 + ( Y 1 - Y о)2 , ( X 2 — X 0 )2 + ( Y 2 — Y 0)2 , ( X з — X о)2 + ( Y з — Y о)2 •
Так как рассматриваемая проблема предполагает определение позиции мобильного объекта внутри помещений, то для расчета дистанции от мобильного объекта до базовой станции необходимо использовать модель распространения радиосигнала в условиях непрямой видимости. В работе [9] в качестве такой модели авторами рассматрена модель Окумара-Хата:
log( r )— 11 n ( P TX
— P RX + G TX + G RX — X a + 20 log( X ) — 20 log(4 п )) ,
также часто используется логарифмическая модель затухания (log-normal shadowing -LNS):
PL ( r ) — PL о + 10 n 1g r^ + X a ,
где r - расстояние от мобильного объекта до базовой станции, PL - потеря мощности сигнала на расстоянии r, PL0 - потеря мощности сигнала на расстоянии одного метра, PTX (дБм) - мощноеть передатчика, PX (дБм) - мощность приемника, GTX (дБи) - усиление передающей антенны, GRX (дБи) - усиление приемной антенны, X (м) -длина радиоволны (для диапазона 2,4 ГГц X = 0,125 м), n коэффициент распространения сигнала в среде (для условий непрямой видимости наиболее оптимальным является значение от 4 до 5), Xa - нормально распределенная случайная переменная со стандартным отклонением а. Для преобразования значений RSS в расстояния потребуется информация о значениях PTX и GTX для выражения 3 и значение PL0 для выражения 4, которые могут существенно отличаться при использовании различных типов мобильных устройств, что затрудняет применение данных моделей при использовании метода трилатерации. В работах [10,11] авторами рассмотрены более сложные модели распространения радиосигнала внутри помещений, которые также требуют знания параметров PTX и GTX. В работах [3,12,13] рассматривается модель затухания сигнала, выраженная следующей формулой:
P ( r ) = P о — 10 n lg( r ) , (5)
где r - расстояние от мобильного объекта до базовой станции, P 0 - значение мощности сигнала при r = 1 м. В рассматриваемом случае значения P 0 и n неизвестны. Для устранения данных неизвестных используют дифференциальную латерацию, рассмотренную в работах [3,13] и использующую алгоритмы на основе:
• минимизации отношения коэффициентов затухания сигнала;
• оценки коэффициентов затухания сигнала;
• минимизации разности значений затухания сигнала.
2. Локализация устройств между двумя базовыми станциями
Перечисленные алгоритмы аппроксимируют выражение 5 путем перебора возможных координат мобильного устройства, но при этом предполагается, что значение r известно.
Таким образом, для применения метода трилатерации необходимо знание расстояний от мобильного устройства до базовых станций. Рассмотренные модели распространения сигнала предполагают калибровку системы перед использованием, что затрудняет применение метода трилатерации для решения рассматриваемой задачи. В ряде случаев количество базовых станций, регистрирующих сигнал от мобильного устройства может быть менее трех.
В работе [14] авторами произведена оценка эффективности различных алгоритмов локации, использующих радиокарты, нейронные сети, вероятности и информацию о ближайших соседях. В качестве ключевых критериев оценки авторы выделили точность позиционирования, время вычисления локации и энергопотребление. По результатам описанных авторами экспериментов большинство из рассмотренных ими алгоритмов позволяют достигать точности позиционирования до 2,5 метров, включая алгоритмы на основе методов KNN и WKNN. Для расчета локаций авторами использовалось помещение площадью 560 м2, в пределах которого было установлено 9 базовых станций, а также 64 базовых станции в других частях здания, показания RSS от которых можно было регистрировать в различных частях тестовой площадки. Из экспериментальных данных, полученных в работе [13], автор делает заключение, что недостатком метода WKNN является небольшая разница в регистрируемых значениях RSS при большом количестве базовых станций, что приводит к существенным погрешностям при вычислении локации. Автор не рекомендует располагать базовые станции близко друг к другу, что характерно для LBS.
Основными проблемами для расчета локации в корпоративных Wi-Fi сетях являются динамика изменения свойств таких сетей, недостаточное для расчета локации количество базовых станций, а также отсутствие информации, необходимой для вычисления расстояний между мобильным устройством и базовыми станциями.
Рассмотрим модель, рекомендованную Международным союзом электросвязи (ITU-R 1238) для расчетов потерь сигнала внутри зданий и помещений:
L total = 20lg( f ) + N lg( r ) + Lf ( n ) - 28 дБ , (6)
где N - листаипиоипый коэффициент потерь мощности, f - частота. (МГн), r - расстояние в метрах между мобильным устройством и базовой станцией, Lf - коэффициент потерь за счет прохождения сигнала через пол, n - количество этажей между базовой станцией и мобильным устройством. В пределах этажа предполагается расчет локации на основе информации от базовых станций того же этажа, в связи с чем параметром Lf ( n ) можно пренебречь. В работе [15] автор экспериментальным путем подтвердил, что данная модель одна из наиболее эффективных для планирования беспроводных сетей. Рассмотрим ситуацию, когда две базовые станции фиксируют показания RSS от мобильного устройства, а также друг от друга. Поскольку расстояние между базовыми станциями известно, то можно вычислить значение коэффициента потерь мощности N. Для примера, на рис. 3 базовая станция B 1 фиксирует значение RSS2 от базовой станции B 2, а базовая станция B2 фиксирует значение RSS 1 от базовой станции B 1.
И Ml г2 Si ф------------>i.........[...........ь----------------#в2
ф - Базовая станция
Рис. 3. Принцип работы предлагаемого метода
Значения выходной мощности обеих базовых станций известны, поэтому можно установить фактические значения потерь мощности сигнала от обеих базовых станций, как L i = RSS TX i — RSS RX i, г де i - номер базовой станции, RSS TX соответствует выходному сигналу без потерь, a RSS RX - мощности зарегистрированного удаленной стороной сигнала. Таким образом, значение N i можно определить как:
N i = ( L i — 20lg( f ) + 28) / (lg( D j )) , (7)
где j - идентификатор расстояния между базовыми станциями, на рис. 3 данному расстоянию соответствует длина отрезка D 1 , j = 1. Очевидно, что потери сигнала между базовыми станциями будут динамически меняться, а следовательно значение N i является переменным. Используем полученное значение N i для вычисления расстояния между i -й базовой станцией и мобильным устройством:
LMi - 20lg( fi ) + 28
гг = 10 Ni , (8)
где LM i - потери мощности сигнала от мобильного устройства. Поскольку выходная мощность сигнала мобильного устройства не известна, то в качестве исходного значения мощности сигнала мобильного устройства принимается фиксированное значение RSS TX M = 0 дБм. на, основании чего рассчитываются предварительные значения r i и A j (см. рис. 3). Так как точке M j соответствует значение A j, равное нулю, то для приближения A j к нулю необходимо подобрать максимально точное значение выходного сигнала мобильного устройства, либо определить значения xi. В первом случае можно воспользоваться методом перебора вариантов значений мощности сигнала мобильного устройства RSS TX M для определения r i , при которых A j близок к нулю. Во втором случае значение A j может иметь также отрицательное значение, что соответствует пересечению отрезков r i и r i +i. Рассмотрим второй случай более подробно. Затухание радиосигнала пропорционально логарифму, поэтому можно представить значения x i в качестве зависимости x i = X j • lg( r i ), г де X j некоторая фиксированная величина, которая определяется следующим выражением:
X j = (A , ) / (£ lg( rt )) , (9)
где значение A j = D j — ^r i. Затем можно вы числить значения R i, сумма которых соответствует значению D j, а точка M j их границе, как R i = x i + r i.
В предлагаемом способе локализации возможная позиция мобильного устройства определяется на отрезке Dj, соединяющем две базовые станции. При этом можно использовать различные типы мобильных устройств, а базовые станции могут изменять характеристики. В случае, если сигнал от мобильного устройства регистрируют более, чем две базовые станции, встает задача выбора наиболее оптимальной для расчета локации пары базовых станций. В исследовании в качестве такой пары выбирались базовые станции, суммарная мощность сигнала которых, включая сигнал от мобильного устройства, максимальна, что свидетельствует о меньшем количестве помех на пути распространения радиосигнала между данными базовыми станциями и мобильным устройством и, как следствие, меньшему среднему отклонению регистрируемых значений RSS.
3. Описание эксперимента
Эксперимент проходил в здании Петрозаводского государственного университета (рис. 4). В 11 опорных точках проводилось порядка 20 замеров с интервалом 3 ми-
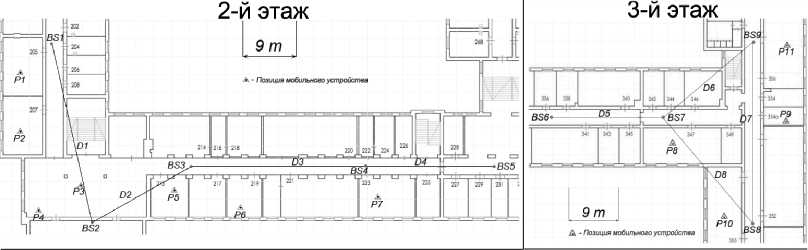
Рис. 4. Тестовые площадки на втором и третьем этаже нуты. Позиции базовых станций обозначены как BS1 - BS9. Соединяющие базовые станции отрезки обозначены как DI - D7, а позиции мобильного устройства, как Р1 — Р11. Соединяющие базовые станции отрезки образуют граф «слышимости». Перечень использованного в эксперименте оборудования представлен в таблице. Планшет 1 был использован во всех опорных точках.
Таблица
Перечень использованного оборудования
|
Модель |
Описание |
|
Контроллер |
Модель Cisco 5508, версия ОС - 7.4.110.0 |
|
Базовая станция (BS2) |
Модель Cisco AIR LAP1042N, ТХ PWR - 20 дБм, 2x4 дБи Стандарт беспроводной связи - 802.Пн (2,4/5 ГГц) |
|
Базовая станция (BS1, BS3-9) |
Модель Cisco AIR LAP1240, ТХ PWR - 17 дБм, 2x2,2 дБи Стандарт беспроводной связи - 802.11g/a (2,4/5 ГГц) |
|
Ноутбук |
MacBook Pro, Core i5 2,4 ГГц, 4ГБ ОЗУ, WiFi 802.Пн (Broadcom), Mac OS X 10.7.5, 64-bit |
|
Планшет 1 |
Asus Nexus 7 (2013), Android 4.4, Qualcomm Snapdragon APQ8064 1500 МГц, 2ГБ ОЗУ, WLAN 802.11 a/b/g/n@2.4GHz/ 5GHz |
|
Планшет 2 |
iPad mini, iOS 8.1.2, Apple A5 1000 МГц, 512 МБ ОЗУ, WLAN 802.lln (2,4 / 5 ГГц) |
4. Анализ результатов
При расчете локации на отрезке возможны 2 случая. В первом, от позиции мобильного устройства проведен перпендикуляр к отрезку, относительно которого рассчитывается локация, во втором - данный перпендикуляр отсутствует. На рис. 5 показан пример отклонения для отрезка D2. Точка пересечния перпендикуляра от по-
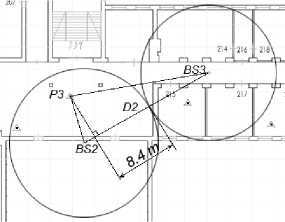
Рис. 5. Отклонение на отрезке зиции РЗ до отрезка D2 принимается за фактическую точку нахождения на отрезке, а расстояние между фактической и рассчитанной позицией на отрезке принмается за отклонение.
Рассмотрим результаты для планшета 1, представленные на рис. 6. Диаграммы соответствует первому и второму случаю.
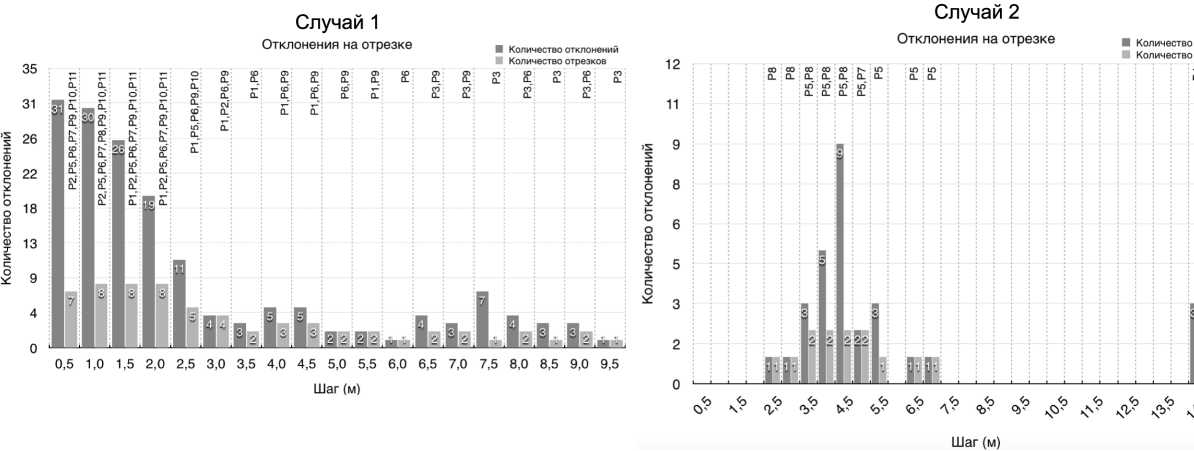
Рис. 6. Результаты отклонений на отрезке
На диаграммах отображено количество отклонений на отрезке для всех позиций, например, для первого случая в 30 измерениях отклонение на отрезке изменялось в интервале от 0,5 до 1-го м. Кроме того, на рисунке представлено количество отрезков и список опорных точек, соответствующих представленным отклонениям. Из результатов видно, что дополнительные базовые станции требуются на участках пересечения разных блоков здания, что также позволит минимизировать наличие второго случая. Локация устройства на отрезке в первом случае рассчитывается достаточно точно, что подтверждает разброс отклонений, большая часть которых находится в диапазоне значений до 3-х метров.
В позиции Р7 были получены замеры для всех типов мобильных устройств, перечисленных в таблице. Максимальное отклонение до 3 метров получилось для ноутбука, при этом большая часть отклонений не превысила 2 м, что позволяет достаточно точно определить позицию мобильного устройства на отрезке вблизи рассмотренной позиции. Первому случаю соответствовало большинство измерений - 74,5%.
Заключение
Полученные результаты подтверждают выдвинутую гипотезу о возможном определении позиций мобильных объектов в Wi-Fi сетях с динамически меняющимися свойствами. Устройства в таких сетях могут иметь различные характеристики и не требуют каких-либо дополнительных предустановок и настроек. Рассмотренный способ расчета локации не требует фаз обучения и калибровки, что позволяет использовать его для определения позиций внутри зданий мобильных объектов различных типов. В ряде случаев для определения позиции на отрезке требуется установка дополнительных базовых станций. Полученные результаты позволяют сделать вывод о применимости предложенного способа локализации в случаях, когда определить более точные позиции людей не представляется возможным.
Работа проводилась при финансовой поддержке программы стратегического развития ПетрГУ в рамках реализации комплекса мероприятий по развитию научноисследовательской деятельности.
Список литературы Определение локации в корпоративных Wi-Fi сетях
- Задача привязки траектории объекта к плану помещения/Р.В. Воронов, А.С. Галов, А.П. Мощевикин, А.М. Воронова//Ученые записки Петрозаводского государственного университета. -2015. -№ 2. -С. 87-91.
- Karimi, H.A. Advanced Location-Based Technologies and Services/H.A. Karimi. -CRC Press, 2013. -354 p.
- Миниахметов, Р.М. Обзор алгоритмов локального позиционирования для мобильных устройств/Р.М. Миниахметов, А.А. Рогов, М.Л. Цымблер//Вестник ЮУрГУ. Серия: Вычислительная математика и информатика. -2013. -Т. 2, № 2. -С. 83-96.
- Ассур О.С., Филаретов Г.Ф. Исследование точности системы wi-fi позиционирования, построенной с использованием метода k-ближайших соседей //Вычислительные сети, теория и практика. -2013. -№ 2. -URL: http://network-journal.mpei.ac.ru/cgi-bin/main.pl?l=ru&n=23&pa=7&ar=1 (дата обращения: 27.03.2015).
- Воронов, Р.В. Динамическое создание карт уровня Wi-Fi-сигналов для систем локального позиционирования/Р.В. Воронов, С.В. Малодушев//Системы и средства информатики. -2014. -Т. 24, № 1. -С. 80-92.
- Малодушев С.В. Исследование зависимостей RSS различных WIFI-устройств в условиях прямой видимости //Современные проблемы науки и образования. -2014. -№ 5. -URL: http://www.science-education.ru/ru/article/view?id=15038 (дата обращения: 29.03.2015).
- So, J. An Improved Location Estimation Method for Wi-Fi Fingerprint-based Indoor Localization/J. So, J. Lee, C. Yoon, H. Park//International Journal of Software Engineering and Its Applications. -2013. -V. 7, № 3. -P. 77-86.
- Pathak, O. Wi-Fi Indoor Positioning System Based on RSSI Measurements from Wi-Fi Access Points -A Tri-lateration Approach/O. Pathak, P. Palaskar, R. Palkar, M. Tawari//International Journal of Scientific & Engineering Research. -2014. -Т. 5, № 4. -P. 1234-1238.
- Bose, A. A Practical Path Loss Model For Indoor WiFi Positioning Enhancement/A. Bose, C.H. Foh//Information, Communications & Signal Processing. (10-13 dec. 2007). -Singapore, 2007. -P. 1-5.
- Sadiki, T. Modelling New Indoor Propagation Models for WLAN Based on Empirical Results/T. Sadiki, P. Paimblanc//11th International Conference on Computer Modelling and Simulation. (25-27 mar. 2009). -Cambridge, 2009. -P. 585-588.
- Japertas, S. Investigation of Wi-Fi Indoor Signals under LOS and NLOS Conditions/S. Japertas, S. Orzekauskas//International Journal of Digital Information and Wireless Communications (IJDIWC). -2012. -Т. 2, № 1. -P. 26-32.
- Japertas, S. Research of IEEE 802.11 Standard Signal Propagation Features in Multi Floor Buildings/S. Japertas, R. Slanys//Электротехника и электроника. -2013. -T. 19, № 8. -С. 101-104.
- Салех, Х.М. Мобильные системы предоставления информационных сервисов позиционирования объектов: дис. канд. тех. наук. -2013, Владимир. -132 с.
- Low-Effort Indoor Radiomap Data Collection and Geolocation on Smartphones/T. Constambeys, C. Laoudias, D. Zeinalipour, C. Panayiotou//International Conference on Indoor Positioning and Indoor Navigation. (27-30 oct. 2014). -Korea, 2014. -Session 7D. -P. 4.
- Старцев, С.С. Модели распространения радиосигнала Wi-Fi //Информационная система Конференции. -2013. -URL: http://conf.nsc.ru/files/conferences/MIT-2013/fulltext/146127/151267/Startsev.pdf (дата обращения: 01.02.2015).
