Оптимизация маршрутов полета беспилотных летательных аппаратов при местоопределении источника радиоизлучения по оценкам угловых координат с их бортов

Автор: Разиньков С.Н., Богословский А.В.
Журнал: Физика волновых процессов и радиотехнические системы @journal-pwp
Статья в выпуске: 4 т.18, 2015 года.
Бесплатный доступ
Исследованы возможности оптимизации маршрутов полета беспилотных летательных аппаратов для повышения точности определения местоположения наземных источников радиоизлучения по оценкам угловых координат с их бортов. Найдены правила выбора точек пеленгования сигналов на траектории движения одиночного беспилотного летательного аппарата и курсовых углов двух синхронно барражирующих носителей приемников-пеленгаторов из состава триангуляционной системы, при которых достигается минимум дисперсии местоопределения объектов.
Беспилотный летательный аппарат, приемник-пеленгатор, среднеквадратическая ошибка пеленгования, дисперсия оценки местоположения объекта
Короткий адрес: https://sciup.org/140255944
IDR: 140255944
Optimization of routes of flight of the pilotless flying devices when determining a place of a source of a radio emission by estimates of angular coordinates from their boards
Possibilities of optimization of routes of flight of pilotless aircrafts for the increase of exactness of position-fix of surface sources of радиоизлучения on the estimations of angular coordinates from their sides are investigated. The rules of choice of points of direction-finding of signals are found on the trajectory of motion of single pilotless aircraft and course corners of two synchronously flying carriers of direction receivers-fingers from composition of the angle system, at that a minimum of dispersion of measurement of the coordinates of objects is arrived at.
Текст научной статьи Оптимизация маршрутов полета беспилотных летательных аппаратов при местоопределении источника радиоизлучения по оценкам угловых координат с их бортов
Для повышения достоверности контроля сложной радиоэлектронной обстановки в комплексах мониторинга на беспилотных летательных аппаратах (БЛА) требуется применять высокоточные методы местоопределения источников радиоизлучения [1]. Данные о координатах позволяют выполнять распознавание объектов при реализации мер маскировки, повышенной скрытности работы, использовании сигналов с адаптивно изменяющимися и перекрывающимися по значениям частотно-временными параметрами [1; 2].
Местоположение передатчиков сигналов большой длительности с характерными демаскирующими признаками [2] можно определять по результатам пеленгования в различных точках пространства на маршруте полета БЛА [1; 3]. Для оценки координат источников коротких (сверхкоротких) импульсов и излучателей с малым набором параметров идентификации [2] необходимо применять триангуляционный метод [4] при синхронном функционировании приемников-пеленгаторов, размещенных на бортах двух носителей, барражирующих в заданных позиционных районах [1].
При этом движение БЛА должно осуществляться по траекториям, выбираемым из условия обеспечения требуемой точности местоопре-деления объектов наличии эксплуатационных погрешностей измерения углов прихода сигналов [3].
В предлагаемой работе представлены алгоритмы минимизации среднеквадратической ошибки (СКО) оценки координат наземных источников радиоизлучения за счет выбора точек их пеленгования с бортов одиночного БЛА и двух носителей приемников-пеленгаторов из состава триангуляционной системы.
Цель работы – достижение наилучшей точности местоопределения излучателей за счет оптимизации маршрутов полета БЛА.
-
1. Оптимизация маршрута полета беспилотного летательного аппарата при местоопределении объектов по многократным оценкам угловых координат
Будем полагать, что источник радиоизлучения расположен в начале полярной системы координат ( R , ф ) и в процессе выполнения измерений остается неподвижным; позиции, в которых определяются направления прихода сигналов в последовательные моменты времени t n и t n + i , n = 1, 2, 3 …, характеризуются наклонными дальностями R n и R n + 1, n = 1, 2, 3 ... Величины R n и R n + 1, n = 1, 2, 3 ^, значительно превышают высоту полета БЛА и дистанцию L между точками пеленгования. Полет БЛА на интервале времени © Разиньков С.Н., Богословский А.В., 2015
t n + 1 - t n осуществляется под курсовым углом Y n , n = 1, 2, 3 ..., отсчитываемым от направления на излучатель в момент времени t n , n = 1, 2, 3 …, против часовой стрелки; направление у 1 определяется относительно ф = 0. Пространственное положение приемника-пеленгатора относительно источника радиоизлучения определяется по результатам пеленгования и данным аппаратуры навигационно-временного обеспечения [5] в бортовом решающем устройстве, построенном на основе линейного фильтра [1; 6].
Систематические погрешности фиксации угла места, тангажа и крена БЛА малы относительно СКО пеленгования сигналов ст и ст , n = 1, ф n ф ( П + 1 )
2, 3 …; погрешностями позиционирования приемников-пеленгаторов при определении дисперсии оценки местоположения излучателя ct R можно пренебречь.
Время корреляции траекторной нестабильности БЛА в полете [5] существенно меньше длительности обрабатываемых сигналов, поэтому измерения в бортовых приемниках-пеленгаторах выполняются без аномальных ошибок [3; 6].
Оптимизация маршрута полета БЛА для достижения наилучшей точности местоопределения источника радиоизлучения состоит в нахождении направления движения у n , n = 1, 2, 3 ... в момент времени t n , n = 1, 2, 3 ... по критерию
-
у n = arg min CT r ;
Y n (1)
Y n *п m , n = 1,2,3 ..., m = 0,1,2 ...
Второе уравнение в (1) исключает из рассмотрения направление движения БЛА непосред- ственно на источник радиоизлучения, поскольку его угловые координаты априори неизвестны [3].
Дисперсия оценки местоположения излучате ля имеет вид [4]
22 2 2
-
2 _ стф n R n + СТф ( n + 1 ) R n + 1
CT R = 9 , n = 1, 2, 3 •••, (2)
sin2 9 n где 9 n — угловое расстояние между пеленгами, измеренными в моменты времени tn и tn+1, n = 1, 2, 3 …
Согласно теореме синусов [7], sin 9n = —— sin Yn, n = 1, 2, 3 •••; (3)
R n + 1
в соответствии с теоремой косинусов [7] наклонные дальности Rn и Rn+1, n = 1, 2, 3 ... связаны соотношением
R 2n + 1 = R 2n + L 2 - 2 RnL cos Y n , n = 1, 2, 3 ... (4)
В результате подстановки (3), (4) в (2) находим
2 22 2 2 2
ст R ( стф nRn + стф ( n + 1 ) ( 2 R n + L
-
- 2 RnL cos y n ) ) ( R 2 n + L 2 - 2 RnL cos y n ) / (5)
/ L 2 sin2 Y n
Минимальная дисперсия местоопределения объекта достигается для курсового угла БЛА Y n , n = 1, 2, 3 ..., при котором первая производная (5) обращается в нуль. С учетом условия Y n * п m , n = 1, 2, 3 ..., m = 0, 1, 2 ... при a n = Rn / L >> 1
направление движения в момент времени t n , n = 1, 2, 3 ... удовлетворяет уравнению cos2 Yn - вn cos Yn + 1 = 0, n = 1, 2, 3 ..., (6)
где в n = [( стф n + стф( n + 1)) a n +
+ ( 2 стф n + 5 стф ( n + 1 ) ) a 2 n + стф ( n + 1 ) ] /
/ [ ( стф n + 2 стф ( n + 1 ) ) a 3 n + 2 стф ( n + 1 ) a n n = 1, 2, 3 _
На основе решения (6) имеем:
Y n = ± arccos
i n __ Ve n 4 2
V 7
+ 2п m ,
n = 1, 2, 3 .„, m = 0,1, 2.„
Знак обратной тригонометрической функции и число m выбираются таким образом, чтобы угол Y n , n = 1, 2, 3 ^ принадлежал полупространству с вертикальной границей вдоль продольной строительной оси БЛА, в котором расположен пеленгуемый источник радиоизлучения. На практике неоднозначность решения (8) устраняется путем селекции направлений прихода сигналов по бортам носителя в многошкальных измерителях с неэквидистантными антенными решетками или пеленгаторов с секторными антеннами [8].
Из (7) следует, что при равных значениях СКО пеленгования сигналов в моменты времени tn и tn + 1 , n = 1, 2, 3 ^ курсовой угол БЛА определяется выражением (8), в котором [3]
2a n + 7a n + 1 a n ( 3a n + 2 )
n = 1, 2, 3 _
На рис. 1 приведены найденные с использованием (7), (8) траектории движения БЛА относительно объекта при исходном значении наклонной дальности R 1 = 30 км, при СКО пе-
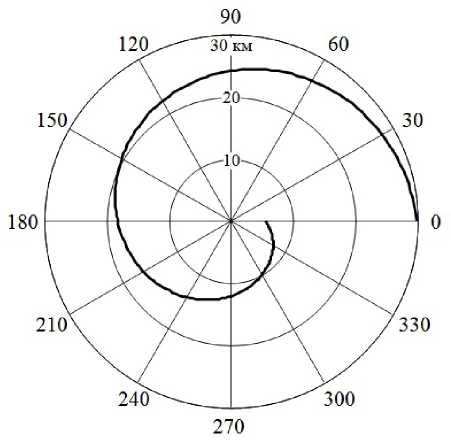
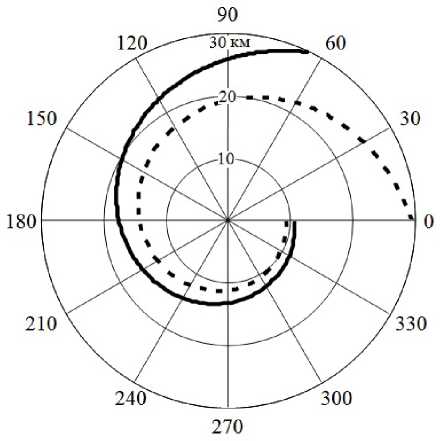
Рис. 3. Маршрут полета БЛА при дисперсии оценки угловых координат объекта о , n = о , ( n + 1 ) , n = 1, 2, 3 —
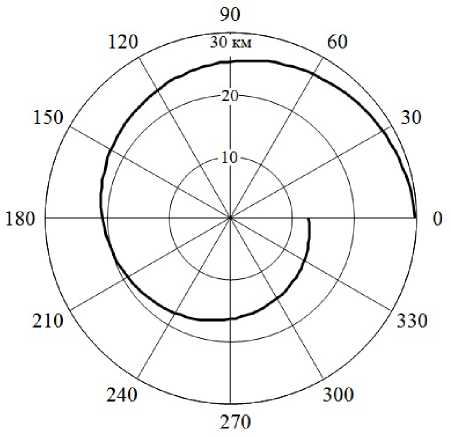
Рис. 1. Маршрут полета БЛА при изменении дисперсии оценки угловых координат объекта по закону о , n / о , ( n +ц = 2, n = 1, 2, 3 —
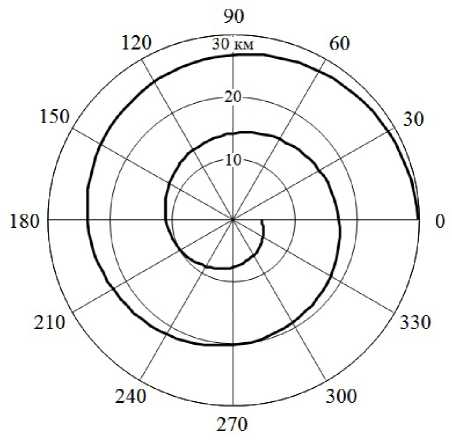
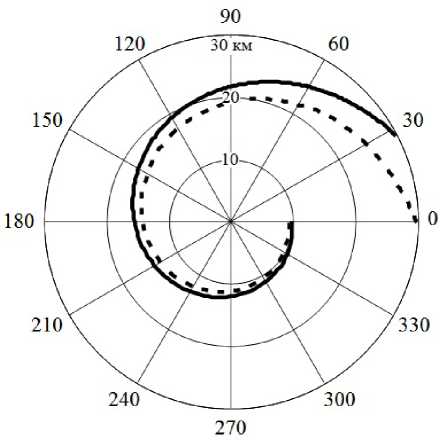
Рис. 2. Маршрут полета БЛА при изменении дисперсии оценки угловых координат объекта по закону о , ( n + 1 ) / о , n = 2, n = 1, 2, 3 —
ленгования сигналов о , 1 = 10° с тенденцией изменения точности последующих измерений о, n / о, ( n + 1 ) = 2, n = 1, 2, 3 - На Рис. 2 пРеД— ставлены результаты, полученные при о , 1 = 1° и закономерности увеличения дисперсии оценки угловых координат источника радиоизлучения вида о , ( n + 1 ) / о , n = 2, n = 1, 2, 3 — Снижение точности пеленгования при подлете к объекту возможно вследствие уменьшения уровня боковых лепестков диаграммы направленности его антенны, по которым осуществляется перехват сигналов в точках пространства, разнесенных в азимутальной плоскости на угол у n , n = 1, 2, 3 —
Анализ приведенных результатов показывает, что наилучшая точность определения местоположения источника радиоизлучения достига- ется при движении носителя приемника-пеленгатора по траектории в виде спирали. Изменение курсового угла, определяемое значениями дисперсии оценки угловых координат излучателя, возрастает относительно начального значения по мере уменьшения наклонной дальности Rn , n = 1, 2, 3 — За счет повышения точности пеленгования при приближении к объекту сжатие спирали уменьшается. При этом протяженность маршрута полета БЛА на рис. 2 превышает длину траектории движения на рис. 1 примерно в 1,7 раза.
На рис. 3 приведен маршрут полета БЛА, проложенный с использованием (8), (9), при равной точности пеленгования излучателя в моменты времени tn , n = 1, 2, 3 — Согласно (9), траектория движения БЛА не зависит от СКО оценки угловых координат излучателя; точность оценки 22
его местоположения при о , n = о , ( n + 1 ) , n = 1, 2, 3 …, определяется дальностью до приемно-пеленгационного поста. При уменьшении СКО пеленгования сигналов с 10° до 1° протяженность маршрута полета БЛА сокращается в 1,4 раза.
На рис. 4 представлены траектории движения БЛА при местоопределении излучателя по оценкам его угловых координат с СКО о , n = 1° в секторе углов , е [0; 180°) и о , n = 10° в секторе углов , е [180°; 360°), n = 1, 2, 3 —, а на рис. 5 - результаты при о , n = 10° в секторах углов , е [0; 180°) и о , n = 1° в секторе углов , е [180°; 360°), n = 1, 2, 3 …
Согласно приведенным зависимостям, маршрут полета БЛА существенно зависит от дисперсии ошибки оценки угловых координат объекта в начальный момент времени. При этом, несмо-
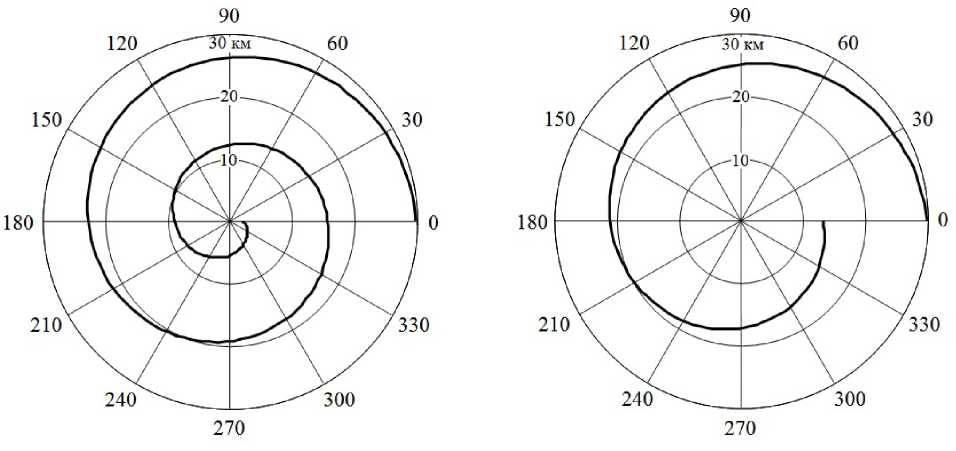
Рис. 5. Маршрут полета БЛА при СКО пеленгования объекта С ф n = 10 ° в секторе углов фе [0; 180 ° ) и С ф n = 1 ° в секторе углов ф е [180 ° ; 360 ° )
Рис. 4. Маршрут полета БЛА при СКО пеленгования объекта С ф n = 1 ° в секторе углов ф е [0; 180 ° ) и С ф n = 10 ° в секторе углов ф е [180 ° ; 360 ° )
тря на различие точности измерений в секторах углов, для траектории движения нехарактерна значительная асимметрия ввиду свойства спирали восстанавливать свою форму после воздействий [9].
Q n = arctg
f — 1 . 2p n ,
+ n m, p n
R n d ,
n = 1, 2, 3 ..., m = 0, 1, 2 ...;
2. Оптимизация маршрутов полета двух беспилотных летательных аппаратов при местоопределении объектов по результатам синхронного пеленгования
угловое расстояние относительно центра системы координат между точками пеленгования
<) = 9 n +(-1)k+1 Q n +(-1)k Q n+1, n = 1, 2, 3 ..., а дистанция
Будем полагать, для местоопределения источника радиоизлучения выполняются синхронные измерения его угловых координат с бортов двух БЛА, барражирующих на удалении d друг от друга, в моменты времени t n , n = 1, 2, 3 ^ Наклонная дальность Rn , n = 1, 2, 3 ^ определяется как расстояние между объектом и центральной точкой пеленгационной базы; ее величина значительно превышает d , смещение центра пеленгационной базы L и дистанцию L ( k ) , преодолеваемую к- м носителем, к = 1, 2, за интервал времени t n + 1 - t n , n = 1, 2, 3 ^
Для минимизации дисперсии оценки координат излучателя c R пеленгационная база ориентирована перпендикулярно линии, по которой измеряется наклонная дальность. При этом курсовые углы БЛА y nk ) , к = 1, 2, n = 1, 2, 3 ^ определяются на удалении от объекта
L ( k ) = V R 2n + R 2n + 1 - 2 R n R n + 1 cos 9 n ) , к = 1,2, n = 1,2,3
Ввиду того, что a n >> 1, n = 1, 2, 3 ...,
траек-
тория движения центра пеленгационной базы удовлетворяет (8). Курсовые углы носителей приемников-пеленгаторов у^ ) , к = 1, 2, n = 1, 2, 3 … по аналогии с (3) удовлетворяют соотношению
sin Y nk )
к = 1, 2,
Из (12),
R n
Rn , cos Qn
где
/-V
Rn+1 ( k )
L ( к ) s 9 n ,
n = 1, 2, 3 ...
(13) с учетом (10), (11) находим, что
направление движения k-го БЛА, к = 1, 2 в момент времени t n, n = 1, 2, 3 ... соответствует главному значению аргумента функции ctg Ynk) =
sin (9n +(-1)k+1 Q n +(-1)k Q n+1)
R n cos Q n + 1 x ----------- +
Rn + 1 cos Q
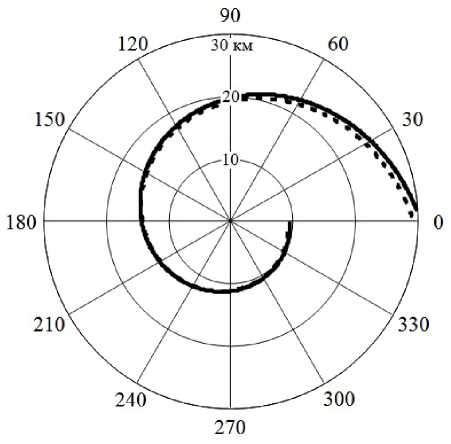
Рис. 6. Маршруты полета БЛА при местоопределении объектов триангуляционной системой с пеленгационной базой d = 2 км —
+ ctg ( э n + ( -1 ) k + 1 Q n + ( -1 ) k Q n + 1 ) .
Правило выбора знака перед первым слагаемым аналогично использованному при устранении неопределенности решения (8); знаки «–» и «+» перед функцией ctg ( ... ) определяют траектории движения БЛА, смещенные относительно центра пеленгационной базы на - d 2 и d /2 соответственно.
На рис. 6 приведены маршруты полета БЛА при триангуляционном местоопределении излучателей с пеленгационной базой d = 2 км; на рис. 7 — с базой, при которой a n = 10 ( а ) и а n = 5 ( б ). Штриховой линией представлены траектории, построенные при выборе перед функцией ctg ( ... ) знака «—», сплошной — знака «+».
Из представленных результатов следует, что существенное различие маршрутов полета БЛА при постоянной и варьируемой пеленгационной базе наблюдается на значительном (свыше 20 км) удалении от источника радиоизлучения. По мере приближения к объекту влияние размеров базы на траектории движения БЛА, определяемые по критерию (1), снижается.
Заключение
Таким образом, проведена оптимизация маршрутов полета БЛА с бортовыми приемниками-пеленгаторами, для обеспечения наилучшей точности местоопределении наземных источников радиоизлучения при различных СКО измерений углов прихода сигналов в точках пространства выполнена оптимизация. Найдены правила выбора позиций пеленгования объектов и проведен
а )
б )
Рис. 7. Маршруты полета БЛА при местоопределении объектов в триангуляционной системе с параметром a n = 10 ( а ) и а n = 5 ( б )
анализ траекторий движения одиночного БЛА и курсовых углов двух синхронно барражирующих носителей приемников-пеленгаторов из состава триангуляционной системы.
Список литературы Оптимизация маршрутов полета беспилотных летательных аппаратов при местоопределении источника радиоизлучения по оценкам угловых координат с их бортов
- Радзиевский В.Г., Сирота А.А. Теоретические основы радиоэлектронной разведки. М.: Радиотехника, 2004. 432 с.
- Иванкин Е.Ф., Понькин В.А. Теоретические основы получения и защиты информации об объектах наблюдения. М.: Горячая линия-Телеком, 2008. 386 с.
- Пономарев А.А., Межуев А.М. Оптимизация маршрута летательного аппарата, определяющего местоположение цели по ее угловым координатам // Обнаружение, распознавание и определение параметров образов объектов. Методы и алгоритмы / под ред. А.В. Коренного. М.: Радиотехника, 2012. С. 21-29.
- Кондратьев В.С., Котов А.В., Марков Л.Н. Многопозиционные радиотехнические системы / под ред. В.В. Цветнова. М.: Радио и связь, 1986. 264 с.
- Методы анализа и синтеза в прикладных задачах навигации, связи и управления / под ред. А.В. Коренного. М.: Радиотехника, 2015. 162 с.
- Осипов Е.Б. Способ вывода летательного аппарата на радиоизлучающий объект с использованием оптимальной обработки результатов многократного пеленгования // Вестник Воронежского государственного технического университета. Сер.: Системы автоматизированного проектирования и системы автоматизации производства. 2003. Вып. 3.3. С. 21-25.
- Выгодский М.Я. Справочник по элементарной математике. М.: Наука, 1966. 424 с.
- Рембовский А.М., Ашихмин А.В., Козьмин В.А. Радиомониторинг: задачи, методы, средства / под ред. А.М. Рембовского. М.: Горячая линия-Телеком, 2012. 356 с.
- Савелов А.А. Плоские кривые. Систематика, свойства, применение / под ред. А.П. Нордена. М.: Наука, 1960. 293 с.
