Особенности мехатронных принципов проектирования безреверсных манипуляторов

Автор: Никифоров С.О., Битуев И.К., Никифоров Б.С.
Журнал: Вестник Бурятского государственного университета. Математика, информатика @vestnik-bsu-maths
Рубрика: Математическое моделирование и обработка данных
Статья в выпуске: 2, 2025 года.
Бесплатный доступ
Рассмотрены особенности и преимущества модульного построения безреверсных мехатронных манипуляторов, а также классификация безреверсных манипуляторов, особенности формирования их движения, разновидности компоновочных структур и способов управления. Приведён алгоритм мехатронного проектирования безреверсных манипуляторов, показаны преимущества модульной сборки.
Безреверсные манипуляторы, модульные системы, системы управления, мехатронное моделирование, компоновка, преимущества
Короткий адрес: https://sciup.org/148331885
IDR: 148331885 | УДК: 681.5 | DOI: 10.18101/2304-5728-2025-2-50-62
Features of mechatronic design principles of non-reversible manipulators
The features and advantages of the modular construction of nonreversible mechatronic manipulators are considered. The classification of nonreversible manipulators, the features of their motion formation, the types of layout structures and control methods are considered. The algorithm of mechatronic design of non-reversible manipulators and the advantages of modular assembly are given.
Текст научной статьи Особенности мехатронных принципов проектирования безреверсных манипуляторов
Разработка новых производственных объектов (техники) осуществляется двумя методами: алгоритмизированным и интуитивным [1]. Алгоритмизированный метод предполагает наличие определённого набора стандартных инженерных решений и готовых компонентов. Этот способ даёт возможность инженеру среднего уровня подготовить необходимое оборудование в установленный срок. Такой подход используется пре-50
имущественно при единичном производстве оборудования согласно индивидуальному заказу с соблюдением конкретных технических условий и временных рамок. Если же целью является создание абсолютно уникальных образцов техники либо продукции серийного производства для широкого рынка потребителей, предпочтение отдаётся интуитивному подходу. Здесь основная задача заключается в максимальном снижении себестоимости изделия путём нахождения оригинальных конструкторских и технологических решений, одновременно увеличивающих функциональность продукта. Время разработки в данном случае возрастает, однако большая экономическая выгода обеспечивается благодаря массовому производству и реализации новинки.
Такой подход подразумевает привлечение инженеров с высоким уровнем профессиональной подготовки, обладающих обширными познаниями и глубокими техническими знаниями, позволяющими применять методы интуитивного конструирования. Принципы мехатроники представляют собой дальнейшее развитие именно такого типа проектирования, хотя их использование возможно также и в рамках алгоритмического метода .
-
1 Безреверсные манипуляторы и особенности их мехатронного проектирования
На рисунке 1 представлена принципиальная схема мехатронного устройства высокого уровня.
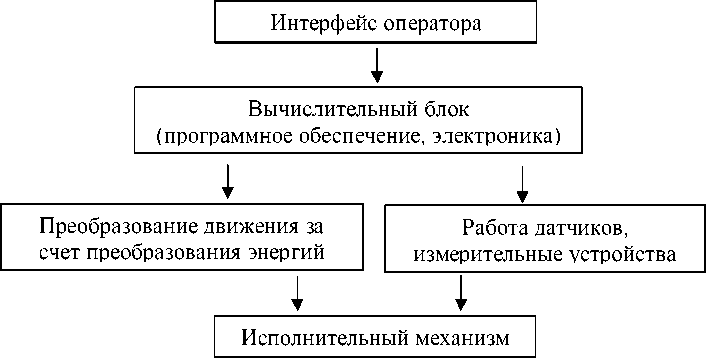
Рис. 1. Мехатронное устройство высокого уровня
На рисунке 2 представлена блок-схема мехатронного проектирования с их применением (с использованием процедуры быстрого прототипирования).
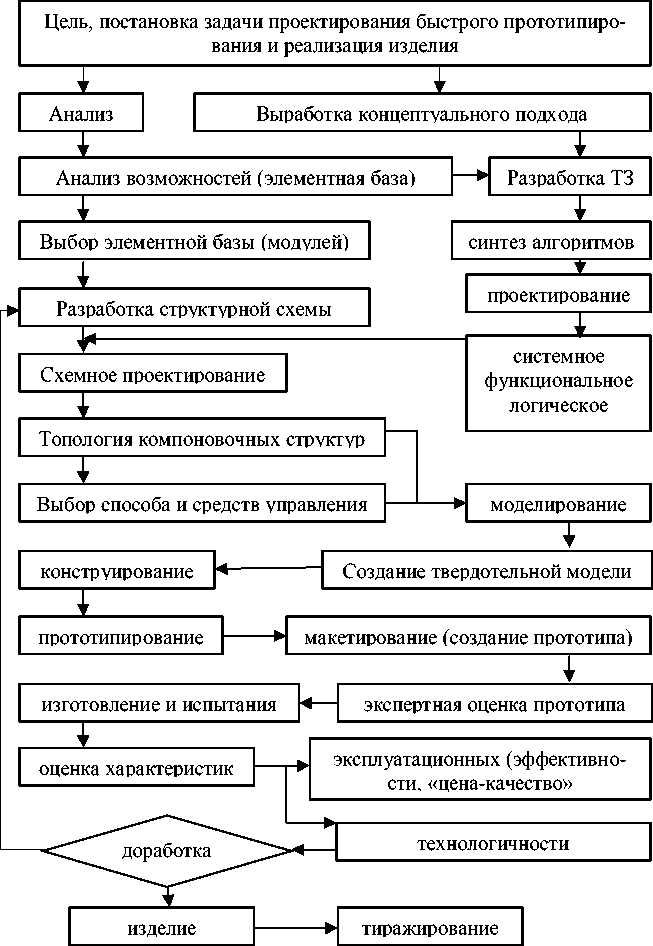
Рис. 2. Блок-схема решения задачи проектирования с применением процедуры быстрого прототипирования
Данный подход предусматривает применение двух методов описания мехатронных устройств при их разработке — структурного и функционального (оценка взаимодействий отдельных элементов (блоков) и окружающей среды, в которой эксплуатируется устройство).
Функциональная структура охватывает весь объект целиком, так как совокупность функций и взаимосвязанных компонентов служит фундаментом для его структурного представления.
При мехатронном проектировании эффективны поисковые исследования и моделирование с применением аддитивных технологий [2; 3].
-
2 Классификация безреверсных манипуляторов
Анализируемые безреверсные мехатронные манипуляторы (БММ) отличаются от традиционных циклических механизмов. Лишь простейшие модели среди них представляют собой системы с единственной степенью свободы и единственным нерегулируемым двигателем. Для сохранения обязательных характеристик промышленного робота, таких как гибкость настройки, способность программирования и адаптация, нередко приходится усложнять структуру механизма, вводить дополнительные приводы и автономные автоматизированные управляющие системы. Возможность полной реализации потенциальных способностей БММ зависит от особенностей их конструкции и компоновочного решения, включая вариативность настроек рабочих режимов. Была разработана многоступенчатая, иерархически организованная классификация БММ (рис. 3), построенная по различным независимым критериям, что придает ей фасетный характер. На иллюстрации показаны возможные типы компоновочных схем БММ и подходы к управлению ими. Левый столбец отражает названия классификационных критериев, тогда как горизонтальные строки содержат соответствующие конкретные значения этих признаков.
Для БММ характерны особые компоновочные структуры с соответствующей системой управления (СУ) в зависимости от требований перенастройке траекторий рабочего органа, стационарных режимов работы приводов, а именно, если не требуется перенастройка, то достаточно одного привода ведущего звена и управление осуществляется только механическими средствами, в случае необходимости перенастройки управления синхронизация работы приводов идет за счёт электронных средств.
Безреверсные мехатронные манипуляторы относятся к классу автоматических машин, а не программируемых вычислительных аппаратов, вследствие чего приоритетным направлением выступает организация необходимых перемещений исполнительных органов посредством механических связей или импульсно-динамических воздействий [4-6]. Если возникает необходимость изменения траектории движения исполнительного элемента, вполне приемлемо механическое управление, при котором достаточно одного двигателя для привода основного звена .
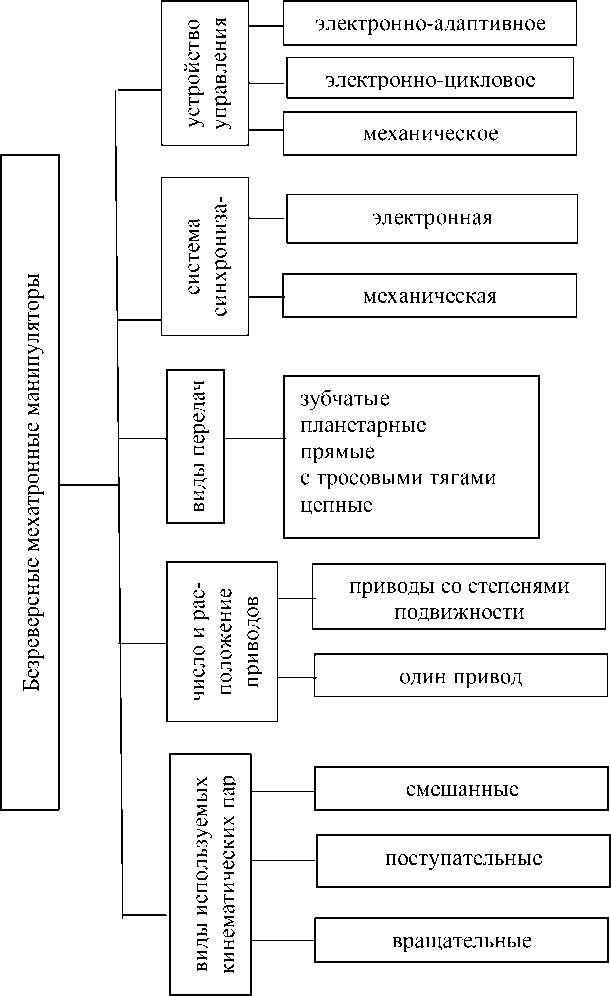
Рис. 3. Классификационная блок-схема безреверсных мехатронных манипуляторов
Однако при наличии потребности в адаптации и реконфигурации применяются рычажно-шарнирные схемы, причем каждая степень подвижности оборудуется собственным двигательным механизмом и нуждается в согласовании действий с управляющей системой автомата [4].
-
3 Особенности модульного формирования движений безреверсных манипуляторов
Способы реализации компоновочных структур и реализации управления определяются требованиями к перенастройке БММ — ЗРМ, ПЗМ и ТТМ с ограниченной перенастройкой, ШРМ с полной перенастройкой. Структуру БММ удобно формировать в модульном исполнении [8].
На рисунке 4 представлены возможные разновидности компоновочных структур и способов их управления [4-7].
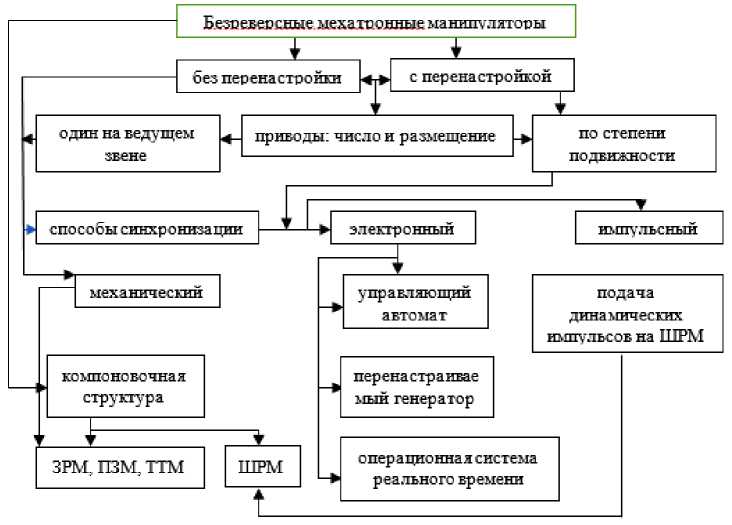
Рис. 4. Разновидности БММ:
ЗРМ — зубчато-рычажный механизм;
ПЗМ — планетарно-зубчатый механизм;
ТТМ — механизм с тросовыми тягами;
ШРМ — шарнирно-рычажный механизм
Модуль представляет собой стандартизированный элемент, отличающийся собственной структурой, функцией и конструкцией, а также способностью соединяться с аналогичными элементами из того же комплектующего набора.
Структура обозначает совокупность всевозможных взаимоотношений между модулями, определение которых составляет основу построения конкретной конфигурации путем установления соответствующих соединений.
Самостоятельность модуля в функциональном плане выражается в вы -полнении определенной задачи, к примеру, обеспечении перемещения по одному направлению или выступании в роли опоры для иных модулей.
Конструктивная независимость модуля подразумевает, что он способен изготавливаться и собираться независимо, после чего может быть подключён к другому модулю. Объединяя модули, мы получаем агрегат, где модуль становится отдельной сборочной единицей (согласно ГОСТ 23887-79), наделённой полной взаимозаменяемостью, возможностью самостоятельной сборки вне зависимости от остальных составляющих изделия и способностью исполнять свою роль внутри готового изделия или функционировать автономно.
Понятие мехатронного модуля включает в себя функционально обособленную конструкцию, включающую в себя двигатели, механические элементы, а также системы передачи энергии и информации. Сборка модульных БММ производится точно в соответствии с предъявляемыми технологическими условиями, исключая необходимость дополнительного проектирования и монтажа, а их конструкция допускает лёгкую модификацию в зависимости от изменений в требованиях.
Модуль должен:
-
- работать как самостоятельная система;
-
- быть гибким (адаптивным);
-
- обладать относительной автономностью;
-
- обеспечивать обмен информации с другими модулями;
-
- быть заменяемым.
-
4 Примеры реализации БММ
-
а) без перенастройки (с одним приводом):
-
1. ПЗМ — компоновка (рис. 5);
-
2. ЗРМ — компоновка (рис. 6);
-
3. ТТМ — компоновка: вместо зубчатых колёс и цепной передачи используются шкивы.
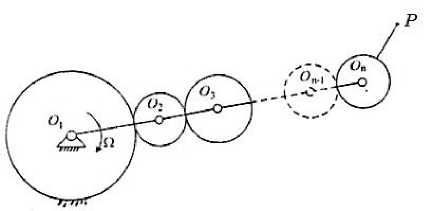
Рис. 5. Реализация безреверсного манипулятора через многократное зубчатое зацепление
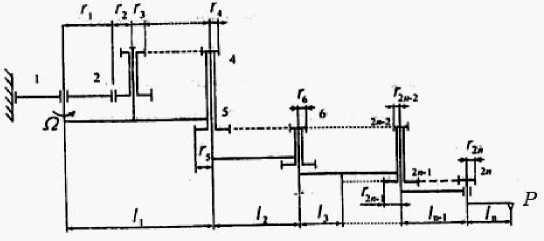
Рис. 6. Манипулятор в n-цепном зубчато-рычажном исполнении
-
б) с перенастройкой:
Используются ШРМ — компоновка (рис. 7), где в шарнирных сочленениях встроены приводные двигатели и их работу синхронизует СУ.
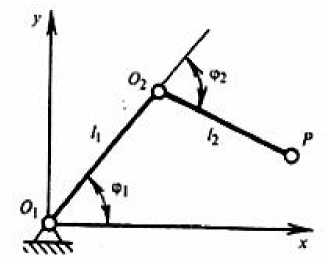
Рис. 7. Двухшарнирный манипулятор в ШРМ исполнении:
О 1 , О 2 — шарнирные сочленения со встроенными приводными двигателями;
1 1 , 1 2 — длины звеньев (соединительные модули);
Ф 1 , ф 2 — углы характеризующие конфигурацию руки;
Р — точка крепления схвата
Траектории рабочего органа будут иметь вид:
x = cosфl + £ cos(N+1)фl, у = sinфl + £ sin(N+1)фl, где N = ± (ф2 /ф1); знак «+» означает вращение звеньев в одном направлении,
X = Х р /1 1 , у = у р /1 2 , £ = I 2 /h .
Агрегативно-модульная система может быть многоуровневой, на низшем уровне будут простые элементы.
Очевидно, эффективный выбор типа мехатронного модуля (узла) возможен лишь в том случае, когда известны характеристики автоматизируемого технологического процесса, иначе неопределённость ситуации не позволит осуществить адекватный выбор модуля.
Принцип модульной реализации оборудования — это наиболее совершенный принцип унификации. Он эффективно применяется производителями ПР: Мицубиси, Фанук, Хитачи (Япония), Юнимэйшен (США), Бош (ФРГ), Электролюкс ASEA (Швеция) и др.
Преимущества модульного принципа создания изделий:
-
- резко сокращаются сроки создания, освоения и эксплуатации;
-
- проектирование модульных изделий сводится к компоновке из стандартных частей, что может быть организовано на любом машиностроительном предприятии;
-
- возникает возможность практически неограниченного расширения номенклатуры изделий, включая быструю настройку различных конфигураций модулей для одноразового использования в специфичных ситуациях;
-
- значительное снижение затрат на производство систем, обусловленное уменьшением стоимости комплектующих при переходе на стандартные серийные модули, а также снижением излишков структурных и параметрических ресурсов;
-
- уменьшение расходов на исследование, обслуживание и восстановление технического состояния систем;
-
- повышение технологического качества, в первую очередь надежности, достигаемой за счет использования проверенных стандартных узлов.
Использование в функциональных модулях принципов стандартизации, унификации и агрегатирования позволяет максимально сокращать сроки проектирования и обеспечить быструю сменяемость номенклатуры изделий. Изделие максимально компонуется из унифицированных составных частей, включающих оптимальные для данного проекта решения. Сочетая их с элементами специального назначения, постепенно наращивая и комбинируя модули, решается поставленная перед проектировщиком задача.
-
5 Алгоритм мехатронного проектироования безреверсных манипуляторов
БММ позволяют автоматизировать широкий спектр производственных операции и допускают гибкую перенастройку (переналадку). Между перенастройками их СУ являются системами с жёсткой логикой. Для компоновок ПЗМ, ЗРМ и ТТМ достаточно одного привода ведущего звена (перенастройка отсутствует), для компоновки ШРМ необходимо обеспечить приводами каждую степень подвижности с синхронизацией их работы с помощью соответствующей СУ. Возможно также динамическое управление импульсными приводными двигателями [9]. Алгоритм структурного проектирования безреверсных ММ приведён на рисунке 8 [2].
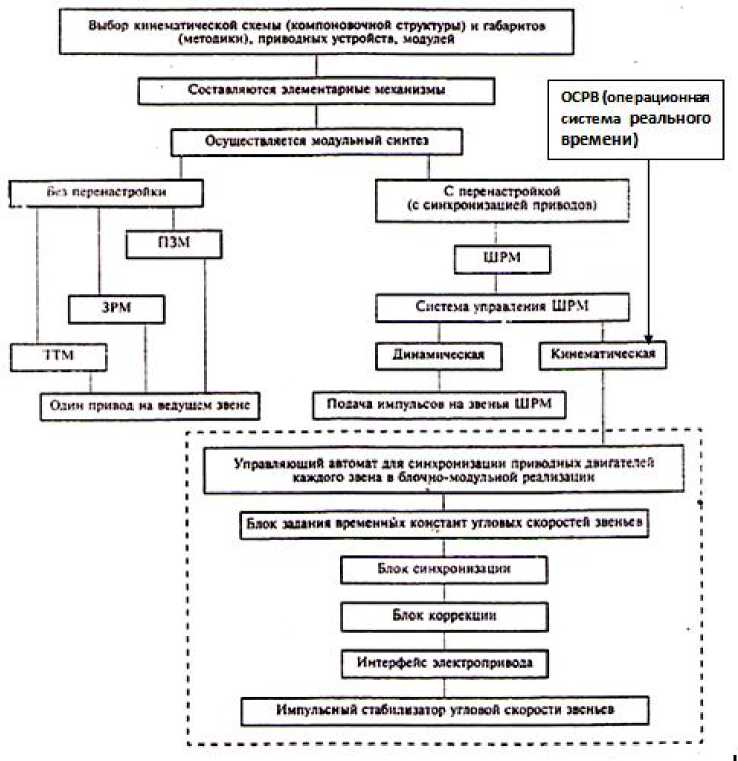
Рис. 8. Алгоритм структурного проектирования БММ
Подробнее особенности функциональных блоков СУ даны в [4].
Блок синхронизации позволяет: поддерживать N = Ф 1 / а> 2 = const при разгоне электродвигателя под нагрузкой Р 0 ; синхронизировать и регулировать время цикла работы БММ с технологическим оборудованием; корректировать траектории движения в рабочей зоне; синхронизировать движение звеньев по инерционным характеристикам в рабочих зонах.
Для модульной сборки БММ без перенастройки достаточно иметь следующий набор исходных базовых модулей 1-7 (табл. 1), т. е. это базовые модули необходимы для БММ с одним приводом. Для ШРМ-реализации с перенастройкой путём синхронизации приводов необходим модуль 8 для взаимного разворота звеньев в шарнирах 9.
Таблица 1
|
Модуль |
Условное обозначение |
Наименование модуля |
|
1 |
Неподвижное зубчатое колесо |
|
|
2 |
Коронное зубчатое колесо |
|
|
3 |
Водило |
|
|
4 |
Цепная передача, тросовые тяги |
|
|
5 |
т |
Соединительное звено |
|
6 |
Зубчатое колесо |
|
|
7 |
Рабочий орган (схват) |
|
|
8 |
■----------------------------------- |
Соединительное звено |
|
9 |
Шарнир |
Координация функционирования БММ с производственным оборудованием в рабочей зоне, особенно в фиксированных позициях ожидания, гарантирует наивысшую производительность. Процесс запускается после сигнала от датчика позиционирования при приближении к стационарному положению. Действие узла синхронизации повторяет принцип функционирования в ускоренном режиме. Запланированные архитектурные решения и электронная схема блока синхронизации обеспечивают предельно быстрое реагирование БММ.
Высший уровень структурной модели БММ — компоновочная модель БММ в целом, здесь механизм является чисто передающим устройством, в котором входной и один из выходных валов составного БММ связаны передаточными отношениями N i = a i / Q , где Q — угловая скорость входного вала ведущего звена (для ШРМ — угловая скорость первого от стойки звена); ai — выходные угловые скорости ведомых звеньев; i = 1,2,.. ,,n.
Передаточное число можно определить, например, матрично-кодовым методом или методами теории графов [9].
Схемы организации СУ перенастраиваемых БММ в общем виде представлены на рисунке 9.
а)
б)
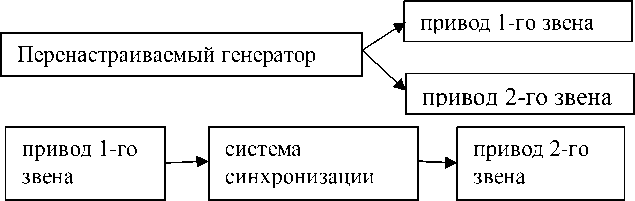
Рис. 9. Схема автоматического управления БММ:
а) от общего перенастраиваемого генератора;
б) от автомата синхронизации приводных двигателей (управляющего автомата)
Заключение
Таким образом, БММ представляют особый класс мехатронных манипуляторов повышенного быстродействия с более простой организацией системы управления и с простыми компоновочными структурами.
