Перспективы применения лидаров для исследования средней и верхней атмосферы

Автор: Матвиенко Г.Г., Бобровников С.М., Кауль Б.В.
Журнал: Солнечно-земная физика @solnechno-zemnaya-fizika
Статья в выпуске: 16, 2010 года.
Бесплатный доступ
В статье предложен набор параметров, качественно характеризующих параметры лидаров, функционирующих в режиме счета фотонов детектирования эхо-сигналов. На основе предложенных параметров осуществляется оценка требований к элементам и узлам лидаров, предназначенных для лазерного зондирования средней и верхней атмосферы в дневное время. Анализируется использование следующих явлений взаимодействия лазерного излучения с атмосферной средой: упругого, комбинационного и резонансного рассеяния, дифференциального поглощения.
Короткий адрес: https://sciup.org/142103425
IDR: 142103425 | УДК: 551.508
Application of lidars to study the middle and upper atmosphere
In this paper, we propose a set of parameters that characterise qualitatively parameters of lidars working in photon-counting mode of echo signal detection. Based on the proposed parameters, we estimate requirements to elements and units of lidars for laser sounding of the middle and upper atmosphere in the daytime. We analyse application of the following interaction phenomena between laser emission and the atmospheric environment: elastic, combinational and resonance scattering, differential absorption.
Текст научной статьи Перспективы применения лидаров для исследования средней и верхней атмосферы
Дискуссионным вопросом климатологии в настоящее время является изменчивость климата на высотах мезосферы. В этой связи в 2007 г. организован международный проект NDMC (Network for the Detection of Mesopause Change,) участником которого является Россия. Задача проекта заключается в ответе на вопрос – происходят ли изменения климата в верхних слоях атмосферы?
Среди возможных причин изменений климата верхней атмосферы следует отметить влияние изменений в нижерасположенных слоях. В этой связи актуальной задачей является создание глобальной и региональных систем мониторинга атмосферы на различных высотных уровнях.
Взаимодействие между отдельными слоями средней и верхней атмосферы и их реакция на внешние воздействия проявляются в изменении термодинамических характеристик и состава атмосферы. Мониторинг профиля температуры, скорости ветра, плотности в пределах средней и верхней атмосферы, структурной динамики аэрозолей в стратосфере и мезосфере, изменчивости озона в озоносфере с приемлемой точностью и частотой повторения возможен посредством использования лидаров.
Оптические лазерные локаторы – лидары – являются эффективным средством дистанционного определения параметров и состава атмосферы. К преимуществам лидарного зондирования следует отнести высокое пространственно-временное разрешение получаемых данных, возможность проведения длительных непрерывных наблюдений, оценку выбранной характеристики в произвольном направлении лазерного луча и на различных высотах.
Для определения того или иного параметра атмосферы используются различные физические эффекты, возникающие при взаимодействии света с компонентами атмосферы.
Эффект упругого (без изменения частоты) рассеяния на частицах аэрозолей широко используется для исследований свойств и вертикального распределения аэрозолей. С этой целью разработаны методики многочастотного лазерного зондирования в диапазоне спектра от ультрафиолета до ближнего инфракрасного интервала.
Трансформация спектрального контура лазерного излучения при рассеянии на молекулах воздуха вследствие доплеровского уширения и сдвига частоты используется соответственно для измерения температуры и скорости ветра. Кроме того, рассеяние на молекулах воздуха и аэрозольных частицах служит в качестве трассера в методе дифференциального поглощения. Этот метод в ближнем УФ-диапазоне эффективен для определения профиля озона в озоносфере.
Метод, основанный на комбинационном рассеянии (КР) света, эффективен для измерения температуры и плотности атмосферы до высот 20–30 км по спектрам комбинационного рассеяния на молекулах азота и кислорода.
Для определения температуры до высоты 120 км пригодны методы резонансного рассеяния излучения на атомах металлов, которые накапливаются на этих высотах в результате сгорания метеоров. Перспективно развитие метода резонансного рассеяния на атомах гелия, который может увеличить высотный потолок зондирования температуры до 200 км.
В настоящее время перечисленные методы имеют различную степень проработки методик и требований к узлам и элементам лидара. Поэтому целесообразно рассмотреть с единой точки зрения, какие технические и методические проблемы могут возникнуть при создании лидарного комплекса, который позволил бы на высотах от 10 до 100 км определять следующие параметры: температуру, скорость и направление ветра, вертикальное распределение концентрации аэрозолей, концентрацию озона на высотах существования озонового слоя, концентрацию и спектры паров щелочных металлов на высотах 80–120 км при наличии дневного фона неба и возможного присутствия оптически тонких кристаллических облаков верхнего яруса. Присутствие облаков иного типа исключает возможность работы мезостратосферного лидарного комплекса за исключением условий кучевой облачности малой бально-сти, когда в направлении зондирования можно ожи- дать длительные просветы между облаками. Требование работы в условиях дневного фона обусловлено необходимостью получения сведений о перечисленных выше параметрах вместе с результатами радиофизических и других методов исследований солнечно-земных связей, проводимых в дневное время. Но работа в условиях дневного фона предъявляет очень высокие требования к энергетическому потенциалу лидара и пространственно-спектральной селекции фоновых засветок. Как будет показано ниже, почти все известные аналоги лидаров, на которых реализованы измерения перечисленных выше параметров, этим требованиям не соответствуют.
Работа при наличии облачности верхнего яруса требует контроля влияния этой облачности на результаты измерений перечисленных параметров верхней атмосферы. Пропускание и рассеяние света кристаллическими облаками сильно зависит от состояния ориентации кристаллических частиц. Поэтому в дополнение к каналам, обеспечивающим измерения параметров верхней атмосферы, целесообразно ввести канал поляризационных измерений элементов матрицы обратного рассеяния. Это позволит оценивать ориентацию частиц.
В первом разделе данной статьи рассматривается некоторый общий подход, который применим к оценке возможностей любого лидара независимо от того, какой из методов измерения того или иного параметра атмосферы на нем реализуется. Это упрощает работу по проектированию лидарного комплекса как многофункционального устройства, обеспечивающего одновременное измерение заданных параметров верхней атмосферы.
В последующих разделах обсуждаются технические и методические проблемы, которые требуется решить для измерения того или иного из перечисленных выше параметров атмосферы.
Обобщенные характеристики лидаров
Пригодность лидара для решения той или иной атмосферной задачи оценивается путем сравнения ожидаемых флуктуаций сигнала и фона со средним уровнем сигнала, рассчитанным из уравнения лазерного зондирования. Цель сравнения - получение оценки точности измерения сигнала за приемлемый промежуток времени. Если при этом попытаться оптимизировать параметры лидара, возникает необходимость варьировать большим их количеством. Но, как будет видно ниже, лидарную систему можно полностью описать тремя обобщенными параметрами, если задачу лидарных измерений характеризовать сформулированными ниже терминами.
В любой задаче лазерного зондирования в качестве отражающей цели выступает ансамбль рассеивающих частиц. Его локационный отклик описывается сечением обратного рассеяния единицы объема, т. е. коэффициентом обратного рассеяния вп. Цель находится на расстоянии R от лидара, а условия прохождения излучения до цели и обратно задаются прозрачностью T ( R , X) интервала трассы [0, R ]. В качестве обобщенной характеристики цели р логично взять комбинацию указанных величин в том виде, в каком они входят в уравнение лазерного зондирования:
р ( R , Х о ) = в п ( R , Х о ) т 2 ( R , Х о >/ R 2 . (1)
Если рассеяние происходит на длине волны X 1 , отличной от длины волны передатчика Хо, то параметр цели имеет следующий вид:
р ( R , Х о , Х 1 ) = в п ( R , Х о , Х ) T ( R , Х о ) T ( R , X i ) / R 2 . (2)
В лазерной локации атмосферы цель обычно рассредоточена вдоль трассы, а сведения о распределении ее структурных неоднородностей составляют часть полезной информации. Степень детализации определяется пространственным разрешением
A R = c Ат /2, (3)
где с - скорость света, Ат - длительность лазерного импульса. При регистрации слабых световых сигналов Ат имеет смысл длительности строба интегрирования и определяется как компромисс между необходимой пространственной детализацией и достаточной точностью измерений.
Погрешность измерения сигнала определяется отношением сигнал/шум сигнал / шум = Ic / ,jD (IЕ), (4) где Ic- средний ток сигнала, а D(IЕ) - дисперсия полного тока приемника, включающего сигнал и шум.
При зондировании верхних слоев атмосферы приходится иметь дело со слабыми сигналами, регистрация которых ведется в режиме счета фотонов с накоплением по к посылкам лазерных импульсов. Накопление ведется в последовательности временных стробов Ат i . Положение i -го строба на оси времени определяется формулой
i тi = то + Е Атi’ (5) j=i где то - время от момента излучения лазерного импульса до начала работы устройства счета фотонов. Дистанция определяется как Ri = cтi /2. Далее без нарушения общности будем считать, что все стробы имеют одинаковую длительность.
Связь между количеством фотоотсчетов N , накопленных в стробе за k посылок лазерного импульса, и средним током определяется формулой
I = e p N / к Ат , (6) где е - заряд электрона, р - коэффициент умножения фотоприемника.
В соответствие уравнению лазерного зондирования за к посылок лазерного импульса в строб попадет в среднем следующее количество сигнальных фотоотсчетов:
Nc = ^ c Ат к р ( R , Х ) h V п к 5 , (7)
где Ео - энергия лазерного импульса, h v - энергия кванта, п - коэффициент пропускания оптического тракта, включая потери на передающей антенне, к -квантовая эффективность фотодетектора, 5 - площадь приемной антенны.
В то же время в строб попадет в среднем некоторое количество фотоотсчетов, вызванных засветкой от фона неба. Их число определяется формулой
N ф = k ∆τ B λ Ω∆λη κ S , ф h ν
где B λ – спектральная яркость фона [Вт/(м2ср·мкм)], Ω – телесный угол приема [ср], Δλ – спектральная полоса пропускания оптического тракта приемника.
Кроме того, в строб попадает некоторое число темновых импульсов фотодетектора:
N T = k ∆τ n T ,
где n T – скорость счета темновых импульсов.
В лидарном эксперименте желательно и обычно осуществляется измерение средней скорости счета шумов. Это делается в промежутках между сигналами и позволяет оценить среднее число сигнальных фотоотсчетов.
N c = N ∑ - ( N ф + N T ). (10)
Статистика слабых световых потоков сигнальных и фоновых фотонов, как и статистика темновых импульсов фотодетектора, соответствует распределению Пуассона. Следовательно, оценка дисперсии суммарного потока фотоотсчетов может быть представлена через оценку средних составляющих сигнала и шумов
D ( N ∑ ) = N c + N ф + N T . (11)
Определим отношение сигнал/шум как
ξ 2 = N c 2 /( N c + N ф + N T ). (12)
Число лазерных посылок k равно частоте повторения лазерных импульсов f , умноженной на время измерения t .
k = tf. (13)
Из формул (7)–(13) с привлечением (3) можно получить следующую формулу для времени, которое необходимо затратить для измерения сигнала с заданными отношением сигнал/шум, пространственным разрешением и условиями фоновых засветок из слоя атмосферы, который характеризуется параметром цели (1) при заданных параметрах лидара t=ξ2 (1+BλK2/ρ+K3/ρ ρ∆RK1 ,
где
K 1 = E 0 f κη S / hv , K 2 =ΩΔλ/ cE 0 , K 3 =2 hvn T / c κη E 0 S . (15)
Величины (15) можно рассматривать как некоторые обобщенные параметры, которыми удобно характеризовать пригодность лидара для решения той или иной задачи. Они определяются исключительно параметрами лидара и фундаментальными константами.
Параметр K1 характеризует возможности лидара при работе в условиях отсутствия внешних и внутренних шумов, когда ограничения накладываются исключительно квантовой природой сигнала. Нетрудно видеть, что в этом случае для минимизации времени измерения при заданном уровне сиг-нал/шум одинаково эффективно как увеличение энергии импульсов E0 при неизменной частоте их следования, так и увеличение частоты при неизменной энергии импульсов. Иными словами важно произведение Е0f, т. е. средняя мощность. Столь же эф- фективно увеличение площади приемной антенны S, квантовой эффективности детектора и пропускания оптики, например, за счет выбора оптической схемы с минимальным количеством отражающих и преломляющих поверхностей.
Параметр K 2 можно определить как фактор подавления уровня шумов от фоновых засветок относительно уровня сигнала, если иметь в виду, что при проектировании лидара этот параметр нужно минимизировать. Нетрудно видеть, что имеется три способа уменьшения этого параметра.
-
1. Уменьшение телесного угла приема с опережающим уменьшением диаграммы направленности лазерного передатчика. Эта мера имеет теоретический предел Ω ≅ λ 2 / S , обусловленный дифракцией. При S =1 м2 Ω~10–12 ср. Реализация этой величины потребовала бы очень жестких требований к качеству оптики. Но на самом деле ограничение вытекает из трудностей совмещения и удержания в этом состоянии диаграмм направленности приемника и передатчика. Реальной величиной, по-видимому, следует признать Ω≥10–8 ср.
-
2. Предел уменьшения спектральной полосы пропускания определяется решаемой задачей, например, шириной контура релеевского рассеяния в методах, основанных на трансформации этого контура в зависимости от физических условий (температура, ветер), или шириной спектра вращательных КР-линий азота и кислорода при определении температуры по соответствующей КР-методике, использующей этот спектр. В первом случае Δλ≈10–6 мкм, а во втором ≈10–3 мкм. Величину Δλ удобно брать в микрометрах, поскольку спектральная яркость фона обычно приводится в размерности [Вт/(м2мкм·ср)]. Таким образом, возможность пространственно-спектральной селекции фона можно в лучшем случае оценить величиной 10–14 мкм·ср.
-
3. Если исчерпаны возможности пространственно-спектральной селекции, то единственным средством снижения влияния фона остается увеличение энергии лазерного импульса. Диапазон энергии импульсов большинства коммерческих лазеров составляет 0.1–1 Дж. Исходя из приведенных цифр, можно считать K 2 ≅ 10 - 22 ср·мкм·с·Дж–1м–1 наиболее благоприятным значением. При взгляде на формулу (14) можно видеть, что шум фона будет мало влиять на длительность измерений, если выполняется условие
Р » B X K 2 . (16)
Параметр K 3 можно определить как фактор влияния шумов детектора. Если в определении этого параметра (15) все стоящие в знаменателе величины положить равными единице, то при скорости счета n T=102 параметр будет иметь порядок 10–24. Нетрудно видеть, что шум детектора может играть заметную роль только в лидаре с хорошей селекцией фона, но малым энергетическим потенциалом.
Формула (12) фактически определяет оценку относительной ошибки измерения сигнала δ N c. При отсутствии шумов фона и детектора δ N c = 1/ N c . Следовательно, для измерения сигнала с точностью
1 % в стробе должно быть накоплено не менее чем 104 фотоотсчетов.
Требования к параметрам лидаров
В качестве иллюстрации к вышеизложенному материалу приведем оценку возможностей лидара, который был использован для измерения скорости ветра в стратосфере авторами работы [Garnier, Chanin, 1992]. Методика основана на измерении доплеровского частотного сдвига контура молекулярного рассеяния.
Можно видеть, что в лидаре реализована хорошая пространственно-спектральная селекция фона ≅ 3.10 - 13 ср·мкм, что близко к величине 10–14, принятой выше в качестве оценки реально достижимой пространственно-спектральной селекции, когда возможность сужения спектральной полосы приемника ограничивается шириной спектра доплеровского контура. Остальные параметры лидара достаточно типичны для современного уровня лидарной техники. На рис. 1 представлен результат расчета времени накопления сигнала, необходимого для достижения относительной ошибки не более 1 %. Такая точность необходима для измерения скорости ветра с погрешностью не более 2 м/c. Согласно приведенному в статье результату зондирования в течение одного часа в ночное время, авторам удалось измерить скорость ветра с приемлемой погрешностью до высот 35–40 км, что достаточно хорошо совпадает с оценкой, представленной на рис. 1.
Из оценки ясно, что лидаром с приведенными выше техническими характеристиками невозможно за приемлемое время провести аналогичные измерения с приемлемой точностью на высоте 100 км даже в ночное время.
Необходимое время накопления в отсутствие шумов фона при заданных точности измерения и пространственном разрешении определяется параметром K 1 . В лидаре с приведенными выше параметрами K 1 =6.35·1016. Легко показать, что для того чтобы за один час получить сигнал с высоты 100 км с
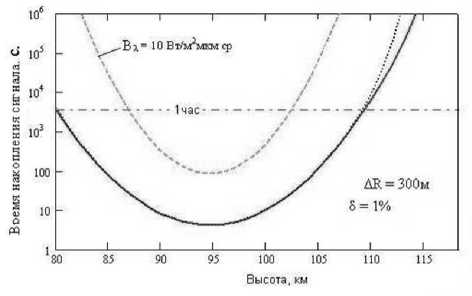
Рис . 1. Оценка времени накопления сигнала , необхо димого для получения относительной погрешности изме рения δ =1 % с пространственным разрешением 1000 м при трех значениях спектральной яркости фона B λ на ли даре для измерения скорости ветра , параметры которого приведены в работе [Garnier, Chanin, 1992] и имеют сле дующие значения : E 0 =0.25 Дж , λ =532 нм , f =30 Гц , η =0.13, κ =0.17, S =0.156 м 2, Ω =9 · 10–8 ср , Δλ =3 · 10–6 мкм .
относительной ошибкой 0.01 и пространственным разрешением 1 км, нужно иметь K 1=3.7·1021. Это означает, что произведение энергии импульса на площадь антенны должно равняться примерно 2500 Дж·м2. Снижение требований к энергетическому потенциалу лидара возможно за счет снижения требований к точности измерений, пространственному разрешению и увеличению допустимого времени измерения. Результат такого компромисса можно видеть на рис. 2. В представленном расчете допустимая относительная погрешность увеличена до 3 %, а пространственное разрешение на высотах от 90 до 100 км – до 5 км.
Ниже пространственное разрешение может быть 1 км и меньше. Энергия импульса взята равной 1.6 Дж, а площадь антенны 4.7 м2. Как следует из расчета, при работе в условиях ночного и сумеречного фона заданная точность на высоте 100 км может быть достигнута за 5–10 ч непрерывной работы. В условиях дневного фона задача оказывается невыполнимой.
Для измерения температуры и скорости ветра на высотах 90–110 км подходит метод, основанный на измерении доплеровского уширения контура линии резонансного рассеяния атомами натрия. В мире имеются действующие установки, на которых достигнуты неплохие результаты при работе в условиях ночного фона [Kawahara et al., 2001]. Из примера, представленного на рис. 3, можно видеть, что при энергии лазерного импульса 0.1 Дж и приеме на антенну с площадью 4.7 м2 можно измерить сигнал с относительной ошибкой не более 1 % за вполне приемлемое время даже в условиях дневного фона.
Работа лидаров для измерения температуры и скорости ветра по молекулярному рассеянию и резонансному рассеянию на атомах натрия основана на принципе измерения деформации и частотного сдвига доплеровского контура рассеяния.
Для измерения температуры на высотах ниже 30–40 км больше подходит хорошо отработанный в ИОА СО РАН метод, основанный на анализе вращательного спектра КР на молекулах азота и кислорода. Его преимущество заключается в большей чувствительности по сравнению с измерениями доплеровского контура. К настоящему времени наработан опыт использования этого метода до высот 10–12 км [Bobrovnikov et al., 2009]. В процессе работы по оценке возможностей использования этого метода для измерения температуры до высот 30–40 км, помимо очевидного
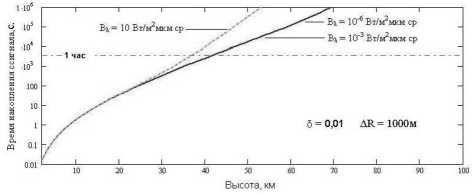
Рис . 2. Время накопления сигнала для достижения от носительной погрешности измерений не более 3 % лида ром с параметрами , указанными на рисунке , при сниже нии требований к пространственному разрешению до 5 км на высотах свыше 90 км . Технические параметры лидара : E 0 =1.6 Дж , λ =355 нм , f =30 Гц , η =0.13, κ =0.17, S =4.7 м 2, Ω =9 · 10–8 ср , Δλ =3 · 10–6 мкм .
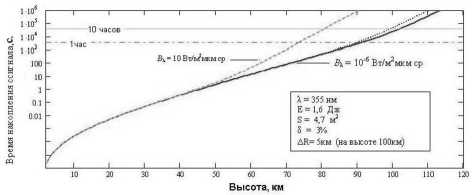
Рис . 3. Зондирование натрия . Оценка времени накоп ления сигнала для достижения относительной погреш ности не более 1 % при пространственном разрешении 300 м . Слой натрия моделировался нормальным распре делением σ =4 км , концентрация атомов натрия в центре слоя 5·109 м –3. Параметры лидара : E 0 =0.1 Дж , λ =589 нм , f =30 Гц , η =0.13, κ =0.17, S=4.7 м 2, Ω =9 · 10–8 ср , Δλ =3 · 10–6 мкм .
решения – повышения энергетического потенциала лидара, – была выдвинута новая идея по использованию интерферометра Фабри–Перо в качестве гребенчатого фильтра для повышения дальности зондирования в дневное время. В этой связи рассмотрены подавление помехи рассеянного фона дневного неба, факторы повышения отношения сигнал/фон, выбор отражательной резкости функции пропускания, выбор ширины линии возбуждающего излучения. В результате анализа показано, что применение интерферометров Фабри–Перо для фильтрации фона позволяет значительно снизить время накопления, необходимое для обеспечения требуемой точности измерений и, следовательно, позволяет расширить возможности методики измерения температуры при проведении дневных измерений.
Измерения вертикального распределения концентрации озона в высотном диапазоне 12–35 км на длинах волн зондирования 308, 353 нм ведутся в ИОА с 1989 г. [Бурлаков и др., 2009а, б; Баженов и др., 2009]. Прием ведется на антенну диаметром 0.5 м. Зондирование осуществляется по методу дифференциального поглощения и рассеяния на длинах волн 308, 353 нм, где 308 нм – длина волны излучения эксимерного ХeCl-лазера, 353 нм – длина волны первой стоксовой компоненты, возникающей при вынужденном комбинационном рассеянии (ВКР) излучения с длиной волны 308 нм в ячейке с водородом высокого давления. Прием сигналов на большую антенну позволит увеличить точность, уменьшить время измерений и поднять потолок зондирования до 50 км, где озон еще присутствует.
Большинство измерений оптических характеристик стратосферного аэрозоля (высотные профили коэффициента обратного аэрозольного рассеяния, отношения рассеяния, интегральный коэффициент обратного аэрозольного рассеяния) проводится на длине волны зондирования 532 нм. Эта длина волны является унифицированной для мировой сети ли-дарных станций, что позволяет сравнивать характеристики стратосферного аэрозоля, измеренные в различных регионах планеты. Для определения микроструктурных характеристик аэрозольных частиц (размеры частиц, площадь поверхности и др.), которые определяют рассеивающие и поглощающие свойства стратосферного аэрозоля, в ИОА измерения проводятся на длинах волн 355, 532 и 683 нм, где 683 нм – длина волны первой стоксовой компоненты возникающей при ВКР излучения с длиной волны 532 нм в ячейке с водородом высокого давления. [Зуев и др., 2009]. Зондирующее излучение на трех длинах волн реализуется в одном световом пучке.
Заключение
В результате анализа лидарных методов [Матвиенко и др., 2009] можно предложить следующую схему лидара для мониторинга стратосферы и мезосферы.
-
1. Измерения температуры и скорости ветра до высот 80–90 км могут быть обеспечены применением методик, основанных на измерениях доплеровского уширения и частотного сдвига центра линии лазерного излучения. Эти задачи требуют наибольшего энергетического потенциала и определяют максимальные технические параметры лидара. При этом энергетический потенциал лидара (произведение энергии лазерного импульса на площадь приемной антенны) должен быть порядка 8–10 Дж·м2 при частоте повторения импульсов 30 Гц. Большая энергия лазерного импульса в настоящее время может быть обеспечена синхронной посылкой импульсов нескольких коммерческих лазеров типа Powerlight 90–30 фирмы «Continuum». Например, результаты, представленные на рис. 2, предполагают использование четырех таких лазеров и антенны 4.7 м2. Требуемая площадь антенны достигается использованием матрицы из шести зеркал, объединенных конструктивно в единый блок, который допускает наклон от вертикали до 30° без рассогласования параллельности направлений оптических осей зеркал.
-
2. Измерения температуры и скорости ветра на высотах 90–110 км могут быть обеспечены применением методик, основанных на измерениях доплеровского уширения и частотного сдвига центра линии резонансного рассеяния на длинах волн дуплета натрия 589.0–589.6 нм. Прием сигналов ведется на антенну 4.7 м2. Достаточная энергия лазерного импульса 0.1 Дж.
-
3. Измерения температуры до высот 30–40 км будут осуществляться посредством регистрации вращательного спектра КР молекул азота и кислорода при длине волны возбуждающего излучения 532 нм с приемом излучения на антенну 4.7 м2.
-
4. Для измерения концентрации озона может быть использована достаточно отработанная методика дифференциального поглощения на длинах волн 308 и 353 нм с применением эксимерного ХeCl-лазера.
-
5. Исследования вертикального распределения аэрозоля ведутся на длинах волн Nd:YAG-лазера 355, 532 и 1064 нм с приемом на антенну 4.7 м2.
Вопрос интеграции каналов, реализующих различные методы измерений на одну приемную антенну, решается следующим образом: каналы измерений по пунктам 1 и 3 разделяются спектрально. Измерения по пунктам 2 и 4 разделяются между собой и от каналов 1 и 3 посредством организации многолепестковой диаграммы направленности антенны [Кауль, 1987]. В ИОА имеется опыт использования этого решения на антенном комплексе с диаметром главного зеркала 2.2 м.
Работа выполнена при финансовой поддержке Сибирского отделения РАН по заказному проекту № 2
«Разработка научно-технических основ национального гелиогеофизического комплекса РАН».
