Подход к формированию показателей точности определения местоположения автономных беспилотных судов

Автор: Снежко В.К., Якушенко С.А., Бурлаков С.О., Веркин С.С., Чеканова Е.В., Кожевников Д.А.
Журнал: Международный журнал гуманитарных и естественных наук @intjournal
Рубрика: Технические науки
Статья в выпуске: 10-5 (97), 2024 года.
Бесплатный доступ
В работе представлен вариант формирования требований к точности определения местоположения автономных беспилотных судов на основе использования физико-географических условий местности и навигационных особенностей бассейнов внутренних водных путей. Рассчитаны предельные количественные показатели точности для безопасного судовождения автономных судов. Результаты работы могут быть использованы для научного обоснования требований к точности определения местоположения автономных беспилотных судов на внутренних водах России.
Беспилотное судно, точность определения местоположения, навигационные особенности, внутренний водный путь
Короткий адрес: https://sciup.org/170207502
IDR: 170207502 | DOI: 10.24412/2500-1000-2024-10-5-54-60
Approach to the formation of accuracy indicators for determining the location of autonomous unmanned vessels
The paper presents a variant of the formation of requirements for the accuracy of determining the location of autonomous unmanned vessels based on the use of physical and geographical conditions of the terrain and navigational features of inland waterway basins. The maximum quantitative indicators of accuracy for the safe navigation of autonomous vessels are calculated. The results of the work can be used for the scientific substantiation of requirements for the accuracy of determining the location of autonomous unmanned vessels on the inland waters of Russia.
Текст научной статьи Подход к формированию показателей точности определения местоположения автономных беспилотных судов
В начале текущего века в ряде зарубежных стран, позже в России, были приняты концепции по безэкипажным судам (БЭС) и их судовождению по внутренним водным путям (ВВП) с целью уменьшения финансовых затрат на содержание экипажей судна и подготовку квалифицированных моряков. В соответствии с [1, 2] безэкипажное судно - это судно, управляемое внешним оператором или автономной бортовой программой. Автономное БЭС выполняет автономное плавание по заданному предварительно маршруту и управляется только автономной бортовой программой.
Среди важнейших требований к БЭС выделяют безопасность судовождения, как главной причины чрезвычайных происшествий. Для обеспечения безопасности внедряется ряд технических решений направленных на создание новых типов систем [1]. Решающую роль в этом призвана сыграть интеграция навигационных, радиолокационных, оптических, коммуникационных и информационных технологий, повышающих эффективное применение БЭС [2-5].
При управлении подвижными объектами с использованием навигационного поля возникает ряд проблем [6, 7]. Одной из главных проблем в области беспилотных технологий на речном транспорте следует считать проблему автоматического путевождения: удержания судна в пределах фарватера, маневрирование на загибах рек и каналов, расхождении судов, плавание в сложных условиях, причаливание, предупреждение столкновения и т.п. Поэтому в интегрированных системах управления важным аспектом обеспечения безопасности беспилотного судовождения является полное покрытие высокоточным радионавигационным полем бассейнов ВВП. Особенно это актуально при вождении судов в узких местах ВВП (каналах), при интенсивном движении (особенно двухстороннем), в сложных гидрометеорологических условиях (штормовой ветер, сильное течение, наличие льда, посторонних свободно плавающих предметов и т.п.).
Судно, двигаясь по заранее проложенному маршруту на электронной навигационной карте, ориентируется по сигналам высокоточного радионавигационного поля. Очевидно, что запредельная ориентация судна, связанная с неточным определением своего местоположения, может привести к выходу за пределы габаритов судового хода (фарватера) и послужить причиной аварии и даже катастрофы. Поэтому важно заранее сформировать требования к точности радионавигационных систем, обслуживающих суда, так как именно точная проводка судов и своевременное реагирование на изменение местоположение судна при маневрах обеспечит безопасность и эффективность судовождения. Этому вопросу и посвящена данная работа.
Навигационные особенности, влияющие на точности определения местоположения судов речного флота
Для речных потребителей исходными данными при определении требований к радионавигационным системам являются навигационные особенности ВВП. Под навигационными особенностями бассейнов рек будем понимать отличительные свойства и факторы водного пути и окружающей его территории, а также сооружения и устройства, влияющие на качество обеспечения пользователей высокоточным радионавигационным полем. С этой точки зрения навигационные особенности бассейнов водных путей России можно разделить на три основные группы:
-
1. Навигационные особенности собственно водоемов, а именно: глубина фарватера, размеры судоходного хода, скорость течения, высота волны, а также технические и геометрические параметры судов, влияющие на судовождение и его безопасность.
-
2. Навигационные особенности рельефа местности бассейнов, включающие физикогеографические условия, параметры постилающей поверхности почвы, климатические и метеорологические факторы , влияющие на условия распространение радиоволн и уровень сигналов в точке приема.
-
3. Технические сооружения, системы, электроустановки и радиотехнические
устройства в бассейне ВВП, создающие радиопомехи и негативно влияющие на электромагнитную обстановку в точке приема радиосигналов.
Анализ приведенных навигационных особенностей ВВП показывает, что на количественные характеристики требований к точности определения местоположения БЭС влияют особенности ВВП первого типа. Особенности второго и третьего типа влияют на качество приема радионавигационных сигналов, что является дополнительным направлением исследования. Поэтому далее разморим роль навигационных особенностей ВВП первого типа в вопросе обоснования требований к точности определения местоположения судна [8, 9].
Рассмотрим обоснование требований к точности радионавигационной системы на примере Единой глубоководной системы европейской части (ЕГС ЕЧ) ВВП России. Основные показатели навигационных особенностей для некоторых участков ЕГС ЕЧ ВВП приведены в таблице 1.
В таблице 2 приведены обобщенные размеры некоторых крупных речных судов и скорости их передвижения, эксплуатирующие на ВВП России.
Приведенные параметры косвенно могут влиять на обоснование требований к точности позиционирования судов. Так, из таблицы 1 следует, что наибольшее влияние на безопасность судовождения будут оказывать гарантированные габариты судового хода ВВП. Их численные значения можно свести к значениям, которые наиболее опасны для судовождения: глубина канала 3,6 м; ширина канала 36 м, ширина шлюза 18 м; радиус закругления 500 м.
В таблице 2 представлены габаритны крупных и средних речных судов: длина 138140 м, ширина 12,6-16,8 м, осадка до 3,6 м и скорость движения судов до 26 км/ч.
Таблица 1. Навигационные особенности ВВП ЕГС ЕЧ России
|
Участок ВВП |
Протяженность, км |
Гарантированные габариты судового хода ВВП, м |
||
|
глубина |
ширина |
радиус закругления |
||
|
Беломорско-Балтийский канал: Повенецк-Беломорск |
227 |
4 |
36-50 |
500 |
|
(шлюзы) |
(18) |
|||
|
Волго-Балтийский судоходный канал: устье |
367 |
4 |
50-80 |
600 |
|
р. Вытегры-Торово (шлюзы) |
(18) |
|||
|
Волго-Донской канал: проход с р. Волга |
4 |
3,8 |
60 |
800 |
|
шлюз №1-№13 |
101 |
4 |
38 (18) |
550 |
|
от шлюза №13 - г. Волгодонска |
181 |
4 |
120 |
1000 |
|
шлюз №14-шлюз №15 |
6 |
4 |
50 |
1000 |
|
р. Дон: шлюз №15 - Кочетковский шлюз |
129 |
3,6 |
80 |
500 |
|
Кочетковский шлюз-Азов |
164 |
3,6 |
80 |
350 |
|
Канал им. Москвы |
126 |
4 |
55 |
1000 |
|
р. Волга |
599 |
3,5 - 4 |
80-100 |
1000-1200 |
|
р. Белая |
459 |
1,8-4 |
60-100 |
500 |
|
р. Кама |
222 |
3,3-4 |
100-200 |
900 |
|
р. Свирь |
222 |
4 |
85 |
600 |
|
р. Нева |
74 |
4 |
85 |
600 |
Таблица 2. Характеристики судов эксплуатирующих в бассейнах ВВП
|
№ |
Тип судна |
Длина, м |
Ширина, м |
Высота, м |
Скорость, км/ч |
Мощность, л.с |
Класс судна |
|
1 |
Проект 305 |
77,9 |
15,2 |
12,25 |
18-20 |
400 |
О |
|
2 |
Проекта 646 |
65,2 |
12 |
13 |
22-24 |
400 |
М |
|
3 |
Проекта 785 |
80 |
12,5 |
11,4 |
22-24 |
400 |
О |
|
4 |
Проект 588 |
95,8 |
14,3 |
16,7 |
22-25 |
400 |
О |
|
5 |
Проект 26-37 |
96,2 |
14,9 |
14,8 |
24-26 |
575 |
О |
|
6 |
Проект 20 |
121,4 |
16,8 |
15,5 |
24-26 |
900 |
О |
|
7 |
Проект Q-40(А) |
110 |
14,5 |
15,1 |
22-24 |
900 |
О |
|
8 |
Проект 301 |
125 |
16,7 |
15,9 |
22-24 |
1000 |
О |
|
9 |
Проект 02-016 |
135,8 |
16,8 |
16,1 |
22-26 |
1000 |
О |
|
10 |
Проект «Волга-Дон» |
138,3 |
16,7 |
5,5 |
18,5 |
1800 |
|
|
11 |
Проект «Волжский» |
139 |
16,7 |
5,5 |
18,5 |
1200 |
|
|
12 |
Проекта RSD44 |
140 |
16,5 |
5 |
19,5 |
1200 |
Обоснование требований к точности позиционирования речных БЭС
На основе проведенного анализа навигационных особенностей ВВП и их параметров обоснуем требования к радионавигационным системам по точности определения текущего местоположения судна с точки зрения его безопасности при движении по ВВП.
Характеристикой (мерой) точности измерения является погрешность (величина откло- нения значения измерения от его истинного значения). Погрешность измерения параметров точности есть случайная величина, которая распределена по нормальному закону. Вероятность того, что отклонение нормально распределенной случайной величины от математического ожидания меньше заданной величины Д [10, 11]:
где
Ф ( x ) =
p (| x - m\ (Д ) = Ф
1 (2
—;= exp- oV2n^
m + Д-m
- Ф
m - Д-m
= Ф
σ
σ
Д
σ
- Ф
Д
σ
= 2 Ф
Д
σ
нормаль-
ный закон распределения случайной величи-
ны х ; m – математическое ожидание случайной величины; о - среднеквадратическое отклонение (СКО) случайной величины относительно ее математического ожидания.
Таким образом, точность удобно оценивать среднеквадратической погрешностью σ с вероятностью 0,6827, максимальной среднеквадратической погрешностью 2 σ с вероятностью 0,9545 или предельной среднеквадратической погрешностью 3 σ⋅ с вероятностью 0,9973. В большинстве расчетов по связи и навигации в качестве требуемой выбирают доверительную вероятность 0,95, т.е. 2 σ⋅ .
Определим значение σ на основе навигационных особенностей первого типа, а именно, параметров собственно рек, водохранилищ и каналов ВВП. Здесь определяющими, с точки зрения безопасности судовождения, является параметры фарватера или судового хода.
На участках с односторонним движением предельные значения 2 σ должно быть не более 0,5 ширины фарватера (2 σ < L ф /2). На участках с двухсторонним движением – 0,25 ширины фарватера (2 σ < L ф /4). Это максимальные значения погрешности определения местоположения судна, так как в противном случае судно может выйти из фарватера, а это авария. Таким, образом из всех навигационных особенностей главным ограничителем на ВВП является параметры фарватер.
Следующим ограничением является скорость движения судна V и частота отсчётов навигационных данных в судовом средстве наземной навигации (СНН). В настоящее время частота отсчетов в современных СНН составляет один отсчет за одну секунду. Это значит, что выдача координат о местоположении судна СНН происходит с интервалом 1 с
Отсюда справедливо равенство V1σ1 = V2σ2. Обозначив произведение скорости на по- и за это время судно не должно выходить за пределы требуемой погрешности, т.е. 2σ. Следовательно, пройденный путь судном за 1 с не должен превышать 2σ.
Отсюда следует, что чем больше скорость, тем меньше должна быть погрешность. Погрешность обратно пропорциональна скорости или произведение скорости на погрешность величина постоянная 2 σ V = const . Определим эту конс танту для стандартных условий. Для этого воспользуемся данными навигационных особенностей ВВП и характеристик речных судов, приведенными в таблицах 1 и 2. Описывая изменение скорости как случайной величины нормальным законом распределения и используя правило трех сигм можно получить стандартную скорость судов на участках ВВП. Выберем минимальные значения ширины фарватера для рек 100 м и для каналов 36 м. Таким образом, константа для стандартных (средних) условий определяется стандартной скоростью движения судна, ее разбросом, размерами (шириной) фарватера и способом судоходства – одностороннее или двухстороннее движение.
Отсюда следует важный вывод, что при заданной ширине фарватера изменение точности определения координат судна должно сопровождаться обязательным изменением его скорости движения и наоборот. Если по экономическим соображениям скорость судна задана, то тем самым задается и требование к точности. Отношение скоростей равно отношению погрешностей.
V 1 / V 2 = σ 2 / σ 1 .
грешность для стандартных условий параметром С, получим
V i σ i = С или σ i = С / V i .
Необходимо также отметить, что требования к точности позиционирования судна на закруглениях русла реки (канала) будут более жесткими по причине виртуального снижения ширины фарватера за счет инерциального за- носа судна. Кроме того, необходимо учитывать и ширину судов Lc. Тогда ширина для маневрирования судна по причине неточного определения координат будут виртуально изменяться
L фв = ( L ф – L c )(1 – sin α ),
где а - угол поворота судна, определяемое радиусом закругления реки.
Таким образом, требования к точности позиционирования судна при его движении по ВВП будет зависят от многих факторов, основными из которых является: ширина фарватера ВВП; время накопления измерений в
° i
где V ci – текущее значение скорости движения судна с учетом течения водного потока в реке (канале); V cт –– значение скорости движения судна на водном пути для стандартных условий; m – коэффициент определяющий способ движения судов ( m = 2 – однопутное движение; m = 4 – двухпутное движение).
Результаты требований к точности определения местоположения ЮБЭ, обеспечивающих безопасность их судоходства приведены
СНН; скорость судна; размеры судна; угол поворота судна.
Далее обоснуем количественные значения требований к точности определения местоположения судов в зависимости от параметров их движения судов и параметров навигационных особенностей ВВП с использованием формул (2) – (4), получим
( L ф - L c ) V т п VciT н
( 1 - sin а )
на рисунках 1 и 2. Расчет требований проводился для крупногабаритных судов с максимальной шириной 16,8 м, стандартной скоростью 10 км/ч и максимальном угле поворота судна а = 20 град для однопутного и двухпутного движения при ширине фарватера реки 100м метров и канала 18 метров (наихудший случай).
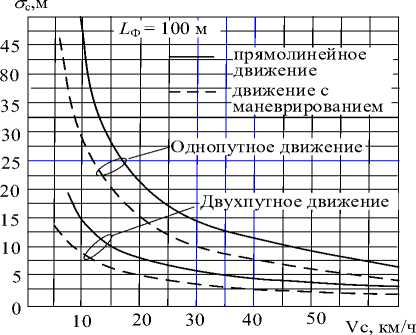
Рис. 1. Требования к точности позиционирования крупногабаритных БЭС в зависимости от скорости их движения и навигационных особенностей рек ВВП
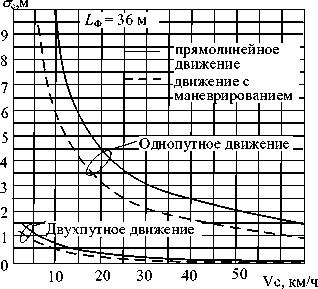
Рис. 2. Требования к точности позиционирования крупногабаритных БЭС в зависимости от скорости их движения и навигационных особенностей каналов ВВП
Таким образом, на основании проведенных исследования по обоснованию требований к точности позиционирования БЭС на ВВП России можно сделать следующие выводы.
-
1. Основным показателем точности для определения местоположения БЭС необходимо использовать максимальную погрешность 2 σ с вероятностью 0,95.
-
2. На количественные характеристики требований определения местоположения БЭС влияют навигационные особенности ВВП первого типа. При этом определяющим параметров при формировании требований к точности является половина ширины фарватера для однопутного движения и четверть ширины фарватера для двухпутного движения. Кроме того, на точность определения местоположения БЭС влияет ширина судна, скорость его движения и его возможности по ма-
- неврированию.
-
3. Для безопасного путевождения крупногабаритных БЭС радионавигационная система должна обеспечить в наихудших случаях с максимальной разрешенной скоростью 20 км/ч с изгибом ВВП) следующие гарантируемые показатели точности: для однопутного движения БЭС не более 13 м для реки и не более 3 м для канала; для двухпутного движения БЭС не больше 5 м для реки и не более 0,2 м для канала. Точность определения местоположения судна в шлюзах должна быть
Заключение
Представленный в работе математическая модель позволяет научно обосновать требования к показателю точности на реках ВВП в зависимости от характеристик навигационных особенностей рек и технических возможностей БЭС, обеспечивающих безопасность судовождения по внутренним водным путям Российской Федерации. В связи с тем, что параметры навигационных особенности на ВВП отличаются, то с экономической точки зрения, требования к точности позиционирования БЭС целесообразно задавать к участкам бассейнов с одинаковыми параметрами. Избирательность требований к показателю точности экономически эффективно с точки зрения создания высокоточного радионавигационного поля.
Результаты работы можно использовать на этапе проектирования и модернизация радионавигационных систем и БЭС.
Дальнейшее исследование должны быть направлены на уточнение законов распределения движения судов по ВВП их скорости, степени влияния параметров БЭС (инерция судна, его неуправляемый дрейф и т.п.) на значение показателя точности обслуживающих радионавигационных полей, а также на интеграцию подсистем и комплексирование устройств с целью повышению безопасности и экономичности судовождения.
не хуже 0,2 м.
Список литературы Подход к формированию показателей точности определения местоположения автономных беспилотных судов
- ГОСТ Р 59284-2020. Суда безэкипажные технического флота. Общие требования. Москва, Стандартинформ 2021.
- ГОСТ Р 59298-2021. Суда безэкипажные внутреннего плавания. Термины и определения. Москва, Стандартинформ 2021. Расширенные только термины.
- Снежко В.К., Якушенко С.А. Военные интегрированные системы навигации, связи и управления. Учебник для вузов связи. - СПб.: ВАС, 2014. - 452 с.
- Снежко В.К., Якушенко С.А. Интегрированные системы навигации, связи и управления сухопутных подвижных объектов. Учебное пособие для вузов связи. - СПб.: ВАС, 2008. - 308 с.
- Снежко В.К., Якушенко С.А. Средства и комплексы навигационного обеспечения систем управления специального назначения: Учебник для вузов связи. - СПб.: ВАС, 2018. - 508 с.
- Якушенко С.А. Проблемы навигационного обеспечения систем мониторинга и диспетчеризации подвижных объектов и оценка его безопасности // Журнал «Информатика и космос». -2019. - № 2. - С. 78-81.
- Снежко В.К., Якушенко С.А., Мальцев А.Д. Наземное навигационное обеспечение в задачах. Учеб. пособие. - СПб.: ВАС, 2010. - 240 с.
- Каретников В.В. Перспективы комплексирования речных инфокоммуникационных технологий для повышения безопасности судоходства на ВВП / В.В. Каретников, В.А. Бекряшев // Речной транспорт (XXI век). - 2014. - № 2 (67). - С. 49-53.
- Шахнов С. Ф. Помехозащищенность и устойчивость радиолиний речных дифференциальных подсистем ГНСС ГЛОНАСС / GPS: монография / С.Ф. Шахнов. - СПб.: Изд-во Политехн. ун-та, 2015. - 170 с.
- Вентцель Е.С., Овчаров Л.А. Прикладные задачи теории вероятностей. - М.: Радио и связь, 1983. - 416 с.
- Вентцель Е.С. Исследование операций. - М.: Советское радио, 1972. - 552с.
