Преподавание основ образовательной робототехники в дистанционном формате обучения

Автор: А. И. Эшниязов
Журнал: Informatics. Economics. Management - Информатика. Экономика. Управление.
Рубрика: Образование
Статья в выпуске: 2 (2), 2023 года.
Бесплатный доступ
Статья направлена на анализ возможностей применения симуляторов при обучении основам образовательной робототехники в условиях дистанционной формы обучения. Описываются методы и технологии, которые используются при обучении робототехнике, такие как программирование, электроника, механика и другие. Основным результатом является разработанная методика обучения основам образовательной робототехники в дистанционном формате, основанная на практической работе с виртуальными микроконтроллерами и программными средствами для работы с ними в симуляторе Tinkercad.
Образовательная робототехника, дистанционный формат, Arduino, симуляторы, Tinkercad, программирование, C++
Короткий адрес: https://sciup.org/14126992
IDR: 14126992 | УДК: 004.896 | DOI: 10.47813/2782-5280-2023-2-2-0301-0310
Текст статьи Преподавание основ образовательной робототехники в дистанционном формате обучения
DOI:
Образовательная робототехника — это область образования и науки, которая использует роботов и программное обеспечение для развития учебных и практических навыков учащихся [1-4]. Эта область обучения включает в себя такие дисциплины, как программирование, электроника, механика и автоматизация. Образовательная робототехника может быть использована для создания различных проектов роботов, которые могут выполнять различные задачи, например, сбор информации, передвижение по определенной траектории, выполнение определенных действий по команде. Например, на рисунке 1 представлены роботы, спроектированные и созданные для занятий по образовательной робототехнике в КФУ. Эти роботы могут быть использованы для участия в соревнованиях и выставках, что помогает учащимся проявить свои творческие и инженерные способности. Образовательная робототехника может быть использована для развития социальных навыков, таких как командная работа, общение и решение проблем в группе [5].

Рисунок 1. Роботы, спроектированные и созданные для занятий по образовательной робототехнике в КФУ.
Figure 1. Robots designed and built for educational robotics classes at KFU.
Междисциплинарная польза обучения образовательной робототехнике заключается в том, что она помогает студентам объединять знания и навыки, полученные в различных дисциплинах, для создания новых решений и идей [6-8]. Этот подход может помочь стать более компетентными и творческими в различных сферах. Например, студенты развивают свои математические навыки, измеряя расстояния, углы поворота и скорость робота. Они также учатся программировать роботов, используя языки программирования, такие как Scratch, Python, C++.
Изучение основ робототехники рекомендуется проводить в очном формате, так как это позволяет учащимся максимально полно освоить необходимые знания и умения. Однако, в некоторых ситуациях, когда невозможно избежать удаленного формата обучения, онлайн платформы могут быть эффективным инструментом для преподавания материала основ робототехники. Они могут обеспечить доступ к современным технологиям, позволяющим учащимся изучать теоретические и практические аспекты робототехники в онлайн-режиме. Примерами таких онлайн-платформ являются робототехнические конструкторы и программы для симуляции робототехнических систем [9].
Далее рассмотрим опыт проведения автором статьи занятий по образовательной робототехнике в дистанционном формате. Для организации видеоконференций со студентами была использована платформа Яндекс Телемост , для обмена текстовой информации со студентами — мессенджер Telegram , для проведения лекционных занятий — облачный сервис Google Презентации , для моделирования робототехнических устройств на практических занятиях — онлайн-симулятор Tinkercad [10], для закрепления полученных навыков — курсы на образовательной платформе Stepik [11].
КОНСТРУКТОР ARDUINO
Конструктор Arduino — это электронный набор, который включает в себя плату Arduino, комплект датчиков, актуаторов и других электронных компонентов, которые можно использовать для создания устройств, таких как роботы, умный дом и другие проекты.
Как показывает образовательная практика [12-14], конструкторы Arduino часто используются в образовательной робототехнике, так как они предоставляют студентам и учащимся возможность изучения основ электроники, программирования и механики через практическую работу над реальными проектами.
На рисунке 2 представлено расположение основных элементов на плате Arduino
UNO R3.

Рисунок 2. Расположение основных элементов на плате Arduino UNO R3 (источник: .
Figure 2. Location of the main elements on the Arduino UNO R3 board (source: .
Плата Arduino — это микроконтроллерная платформа, используемая для создания различных проектов в области электроники и робототехники. Она состоит из следующих основных функциональных элементов. Микроконтроллер — это основной элемент Arduino, отвечающий за обработку программного кода и управление интегральными возможностями конструктора. Порты ввода-вывода (пины) — это интегральные части Arduino, которые используются для подключения различных датчиков, устройств управления и механизмов движения к конструктору. Аналого-цифровой преобразователь (АЦП) — интегральный компонент Arduino, который позволяет измерять величины аналоговых сигналов и преобразовывать их в цифровой формат. Разъем питания для подключения питания к конструктору. Монтажная плата — это место, где устройства, сенсоры и другие интегральные компоненты соединяются и монтируются.
Для того, чтобы писать программы для микроконтроллера Arduino, необходимо знать основы языка программирования C++: синтаксис, основные конструкции языка, таких как переменные, условные операторы, циклы, массивы, функции и т.д. Также необходимо понимание того, как подключать датчики, актуаторы и другие компоненты к плате Arduino, и как использовать соответствующие библиотеки для работы с ними.
СИМУЛЯТОР TINKERCAD
Симуляторы могут помочь обучающимся практиковать программирование и тестирование своих роботов, не имея доступа к реальным устройствам. Некоторые из популярных онлайн-симуляторов, которые можно использовать для обучения, включают Tinkercad, Wokwi, RobotMesh Studio, V-REP, Robot Virtual Worlds и другие [9-11].
Tinkercad — это онлайн-симулятор, который позволяет создавать 3D-модели и электронные схемы, используя простой drag-and-drop интерфейс. В Tinkercad есть библиотека Arduino, содержащая множество готовых компонентов, таких как датчики, дисплеи, моторы и другие, которые можно использовать в своих проектах.
Tinkercad используют для создания виртуальных прототипов проектов, например, можно создать схему подключения датчиков и актуаторов к платформе Arduino в Tinkercad, а затем использовать Arduino IDE для написания программного кода, который будет управлять ими. Это позволяет быстро и легко создавать и проверять концепции прототипов проектов, прежде чем начать физическую реализацию.
На занятиях были рассмотрены принципы работы некоторых технических элементов конструктора, схемы подключения и программный код, отвечающий за включение и передачу информации к устройству.
Были рассмотрены следующие детали конструктора: плата Arduino Uno, макетные платы, резисторы, светодиоды, RGB-диоды, пьезоэлементы, кнопки, датчики температуры, газа, влажности, ультразвуковые датчики расстояния, фотоэлементы, ЖК-экраны, моторы и сервоприводы.
Материалы занятий были подобраны таким образом, чтобы по мере знакомства и освоения новых технических элементов, усложнялся и соответствующий программный код для управления роботом. Студенты знакомились с синтаксисом языка программирования C++, базовыми конструкциями и алгоритмическими.
Использование робототехнического симулятора сделало возможным наглядно продемонстрировать важность структур данных, массивов, условных операторов, циклов, генератора случайных чисел, функций и других концепций программирования.
На рисунке 3 представлен пример материалов для дистанционных занятий по образовательной робототехнике, содержащий схемы сборки и программный код микроконтроллера.
#03. переменные
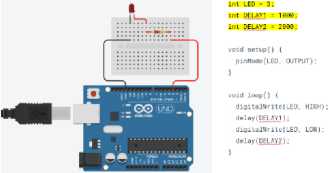
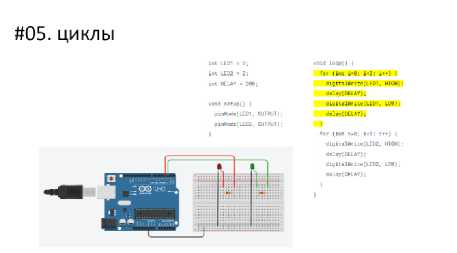

Рисунок 3. Материалы для дистанционных занятий по образовательной робототехнике,
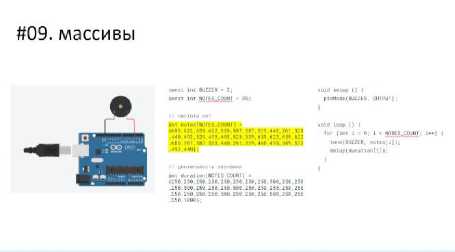
содержащие схемы сборки и программный код микроконтроллера (источник: .
Figure 3. Materials for distance learning on educational robotics, containing assembly diagrams and microcontroller code (source: .

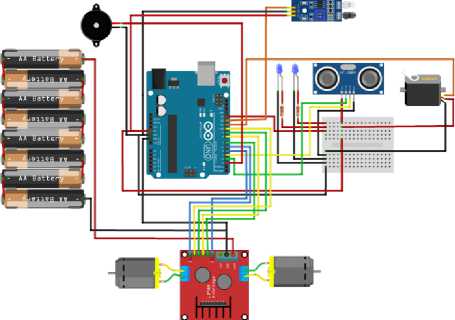
Рисунок 4. Схема подключения сервопривода и ЖК-дисплея к микроконтроллеру, программа на языке C++, контролирующая функциональное взаимодействие.
Figure 4. Scheme of connecting a servo drive and an LCD display to a microcontroller, a C++ program that controls the functional interaction.
На рисунке 4 представлена схема подключения сервопривода и ЖК-дисплея к микроконтроллеру, программа на языке C++, контролирующая функциональное взаимодействие.
ЗАКЛЮЧЕНИЕ
При всех недостатках, дистанционное преподавание предоставляет студентам некоторые дополнительные возможности: изучать материалы в своем собственном темпе и в удобное для них время; получать доступ к курсу, ранее недоступному для них из-за географических ограничений; использовать различные онлайн-ресурсы и программное обеспечение для изучения робототехники.
Чтобы успешно преподавать основы робототехники в дистанционном формате, необходимо использовать разные методы обучения, обеспечивать доступ к качественным онлайн-ресурсам и организовывать практические задания для учеников. Tinkercad является весьма популярным симулятором для Arduino, поскольку он легок в использовании, бесплатен, безопасен. В целом, Arduino и Tinkercad позволяют пользователям создавать и проверять концепты своих проектов виртуально, что ускоряет и упрощает процесс разработки.
Заметим, что робототехника и технология интернета вещей (IoT) тесно связаны друг с другом. IoT — это концепция, которая описывает сеть устройств, которые могут обмениваться данными и управляться удаленно через интернет. Применение IoT в робототехнике позволяет создавать более эффективные и автономные роботы, например, робот, использующий данные с датчиков, подключенных к IoT, для принятия решений о том, как лучше выполнить задачу.
