Применение фильтра Калмана в задаче технической диагностики двигателей внутреннего сгорания

Автор: Шоназаров Парвиз Махмадназарович, Холов Фозил Толибович, Евсютин Олег Олегович, Турсунбадалов Умед Абдумаликович
Рубрика: Краткие сообщения
Статья в выпуске: 1 т.19, 2019 года.
Бесплатный доступ
Рассматривается задача фильтрации виброакустических сигналов двигателя внутреннего сгорания (ДВС) с применением адаптивного фильтра Калмана с целью дальнейшего применения отфильтрованного массива для решения задачи технической диагностики ДВС. Также приведены результаты моделирования адаптивного фильтра в программной среде MATLAB/Simulink реального виброакустического сигнала ДВС автомобиля марки Opel Vectra. Реализовано устройство на базе микроконтроллера Arduino Mega, которое было применено для обработки натурных наблюдений объекта исследования - ДВС. Вопросу разработки методов оперативного определения технического состояния двигателей внутреннего сгорания (ДВС), в первую очередь автомобильных, в настоящее время уделяется особое внимание в связи с обеспечением не только надежности функционирования последнего, но и с все возрастающими требованиями к экономическим и экологическим показателям ДВС. Эти методы должны позволять проводить диагностику технического состояния ДВС автомобиля и своевременно осуществлять регулировки систем и узлов ДВС, тем самым повысить эксплуатационные показатели и срок службы данного объекта. Среди разнообразных методов диагностирования технического состояния двигателей внутреннего сгорания особое значение имеет метод, основанный на анализе виброакустических сигналов, позволяющий производить безразборный контроль узлов и сопряжений ДВС. При этом следует отметить, что анализируемые виброакустические сигналы ДВС взаимокоррелированы с точки зрения работы узлов ДВС. Поэтому для адекватного установления и локализации места дефекта ДВС необходимо предварительно выделить полезный сигнал в условиях взаимовлияния нестационарных виброакустических сигналов, создаваемых различными узлами двигателя.
Адаптивный фильтр, разработка, моделирование, фильтр сигналов, формирование, двигатель, диагностика, регулировки систем, анализ, виброакустический сигнал, оценка
Короткий адрес: https://sciup.org/147232231
IDR: 147232231 | УДК: 004.94 | DOI: 10.14529/ctcr190115
Application of the Kalman filter in the problem of technical diagnostics of internal combustion engines
The paper deals with the problem of filtering vibroacoustic signals of an internal combustion engine (ICE) using an adaptive Kalman filter in order to further use the filtered array to solve the problem of technical diagnostics of ICE. The results of the simulation of an adaptive filter in the MATLAB / Simulink software environment of a real vibro-acoustic signal of the engine of an Opel Vectra brand are also given. Implemented a device based on the Arduino Mega microcontroller, which was used to process the field observations of the object of study - ICE. The development of methods for the operational determination of the technical state of internal combustion engines (ICE), first of all automobiles, is currently being given special attention in connection with ensuring not only the reliability of the latter, but also increasing requirements for the economically and environmentally friendly ICE. These methods should allow to carry out diagnostics of the technical condition of the vehicle’s internal combustion engine and to make timely adjustments to the systems and components of the internal combustion engine thereby increasing the operational performance and service life of the object. Environments of various methods for diagnosing the technical condition of internal combustion engines of particular importance are the method based on the analysis of vibroacoustic signals, which allows indiscriminate monitoring of components and interfaces of an internal combustion engine. It should be noted that the analyzed vibro-acoustic signals of the internal combustion engine are mutually correlated in terms of the operation of the internal combustion engine assemblies. Therefore, in order to adequately establish and localize the location of a defect in the internal combustion engine, it is necessary to first isolate the useful signal in the conditions of the mutual influence of non-stationary vibro-acoustic signals generated by various engine components.
Текст краткого сообщения Применение фильтра Калмана в задаче технической диагностики двигателей внутреннего сгорания
Одним из эффективных методов фильтрации в условиях нестационарности сигналов является использование фильтра Калмана [1].
При применении этого подхода к задаче диагностики состояния ДВС следует учесть, что в рассматриваемом случае при работе ее виброакустический сигнал, воспроизводимый каждым из узлов этого объекта, имеет взаимокорреляцию друг с другом. Поэтому, исходя из идеологии теории клеточных автоматов [2–4], при решении задачи фильтрации сигналов необходимо производить параллельные измерения и совместную обработку виброакустических сигналов для смежных узлов ДВС. Например, если производятся измерения сигнала на первом блоке цилиндров ДВС, следует регистрировать вибросигнал и на втором блоке цилиндров.
Поэтому с учетом этого, рассматривая ДВС как динамическую систему, с которой снимаются случайные одномерные виброакустические сигналы, можно записать для первого и второго канала измерений следующую систему стохастических дифференциальных уравнений для фильтра Калмана:
dx^ = f (t) x (t) + r (t), f (0) = f,;(1)
dt z (t) = c (t) x (t) + d (t) n (t);(2)
drt) = q(t) r(t)+ a(t) m(t);
Ц( t) = g(t )* r(t)+ b(t) v(t).(4)
Автокорреляционную функцию случайных процессов r(t), n(t), m(t), v(t) можно представить в следующих видах:
R rr ( t , t ) = Q ( t )* 5 ( t — t ); ' R m ( t , t ) = N ( t )* 5 ( t -t );
Rmm ( t , t ) = M ( t )* 5 ( t -t );
Rvv (t, t) = V (t, t) * 5( t -t), где Q(t), N(t), M(t), V(t) - известные детерминированные функции, а 8(t -t) - функция Дирака.
В уравнениях(1) и (4) f ( t ) и q ( t ) считаются известными и детерминированными функциями.
В данной задаче приняты следующие условия:
процедура оценки линейная;
оценка несмещенная MX = Mx = x ;
оценка x - эффективная Dx = min.
Здесь вектор состояния x динамической системы, который является случайным гауссовским процессом, в данном случае вектор состояния x , шум измерения являются гауссовскими случайными процессами с нулевым математическим ожиданием. Поэтому примем модель белого шума в системе и в измерениях.
Рассматривая регистрируемый виброакустический сигнал как одномерный дискретный процесс и исходя из выше принятых условий, запишем рекуррентные уравнения для фильтров Кальмана. Для первого блока цилиндров ДВС:
x (k +1) = F (k) x (k) + r (k);(6)
z (k) = Cx (k) + n (k)(7)
и для второго блока цилиндров ДВС:
d (k +1) = D (k) d (k) + m (k);(8)
ц( k) = G (k) d (k) + v (k),(9)
где r ( k ), n ( k ), m ( k ), v ( k ) - белые шумы M [ ( r ( k ) ) ] = 0, M [ ( n ( k ) ) ] = 0, M [ ( m ( k ) ) ] = 0, M [ ( v ( k ) ) ] = 0 и с ковариационными матрицами:
cov[r(k),n(k)] = 0, cov[m(k),v(k)] = 0, cov[r(k),r(k)] = R(k)*8(t-t), cov[n(k),n(k)] = N(k)* 8(t -t), cov[x(k)x(k +1)] = Px(k).
В данной задаче приняты следующие условия:
процедура оценки линейная;
оценка несмещенная Mx = Mx = x ;
оценка x - эффективная Dx = min. Так как оба фильтра являются идентичными, поэтому рассмотрим синтез первого фильтра Калмана.
Исходя из этих условий, выбираем структуру первого фильтра в виде
x(k) = H^(k) + Kz(k), где H и K необходимо определить из условия несмещенности оценки xˆ.
x ( k + 1) = Hx ( k ) + K [ Cx ( k ) + n ( k ) ] ^ Hx ( k ) + KCx ( k ) + Kn ( k ) ^ F ( k ) x ( k ) + r ( k ).
Откуда
Hx(k) = [ F ( k ) - KC ] x ( k ) + Kn ( k ) + rk\
Учитывая, что среднее значение входного белого шума n ( k ), r ( k ) равны нулю, имеем H = F ( k ) - KC .
Матрицу H определим из условия эффективности оценки x ˆ( k ), то есть
Dx = min D (x (k) - x ) ^ min (trPe), где tr() - след ковариационной матрицы; Pe - ковариационная матрица ошибки e(k). Для определения минимума trPe запишем e (k) = (x - x) = [ F (k) x (k) + r (k)] - [ H^k) + KZ(k) ] = [ F (k) x (k) + r (k)] - [ F (k) - KC ] X(k) +
+ KCx ( k ) + Kn ( k ) = F ( k ) [ x ( k ) - x ( k ) ] - KC [ x ( k ) - x ( k ) ] + r ( k ) + Kn ( k ) = F ( k ) * e ( k ) -
-
- KC * e (k) + r (k) + Kn (k).(11)
В результате имеем уравнение Риккати и ковариационную функцию следующего вида e (k) = (x - x) = [ F (k) - KC ] * e (k).
Следовательно, ковариационная матрица ошибки будет определяться
Pe =[ F(k) - KC] Pe + Pe [F(k) - KCf + KT + KRKT.(12)
При ^P = 0 имеем - CTP - CTP + 2KR = 0, dK тогда коэффициент усиления фильтра рассчитывается следующим образом:
K = CTPe * R-1.(13)
Алгоритм рекурсивного обновления оценки x ˆ( k ) соответствует следующей системе уравнений:
Z(k ) = C ( k ) F ( k ) x( k - 1) - прогнозируемое значение наблюдаемого сигнала;
s ( k ) = z ( k ) - z(k ) - невязка между прогнозируемым и реальным наблюдаемыми сигналами.
Поэтому для дискретного случая измерения наблюдаемого сигнала имеем:
K ( k ) = P 6 ( k - 1) C T ( k )* |^ C ( k )* P s ( k - 1) C T ( k ) + Q ( k ) ] - коэффициент усиления стационарного фильтра Калмана;
Jc( k ) = F ( k )J x ( k - 1) + K ( k ) s ( k ) - обновление оценки процесса x ( k );
P e ( k ) = F ( k ) [ P £ ( k - 1) - K ( k ) C ( k ) P E ( k - 1) ] F T ( k ) + Q ( k ) - обновление ковариационной функции ошибки.
Вектор коэффициентов - w фильтра Калмана при адаптивной фильтрации наблюдаемого сигнала не является детерминированным, поэтому матрица перехода F ( k ) = I , а в качестве наблюдаемого сигнала используются сигналы, получаемые с линий задержек фильтра. Выходной сигнал фильтра при этом представляет собой прогнозируемое значение наблюдаемого сигнала, а в качестве образцового сигнала ц ( k ) вступает сигнал, поступающий от смежного блока цилиндров ДВС. В этом случае шумом наблюдаемого сигнала является невязка между воспроизводимым сигналом фильтра и образцовым сигналом ц ( k ), а матрица шума системы
E <®ktoT ^А(k - i)Qk , где Qk превращается в скалярный параметр.
Величина этого параметра слабо влияет на результат фильтрации, и она, может быть, принята в пределах - [ 0,001 ^ 0,01 ] ст 2 [5].
Следовательно, вышеуказанные формулы принимают следующий вид:
y ( k ) = uT ( k ) iw( k - 1) - выходное прогнозируемое значение образцового сигнала;
K ( k ) = ( P 6 ( k )( k - 1) u ( k ) ) / ( u л T ( k ) P 6 ( k - 1) + Qk ) - коэффициент усиления фильтра;
w ( k ) = w ( k - 1) + K ( k ) s ( k ) - обновление оценки коэффициентов адаптивного фильтра Калмана;
P ( k ) = р ( k - 1) - K ( k ) uTp ( k - 1) + Qk - корректировка оценки ковариационной матрицы ошибки.
Классический вариант фильтра Калмана был смоделирован в среде программного продукта MATLAB/Simulink [6] (рис. 1, 2).
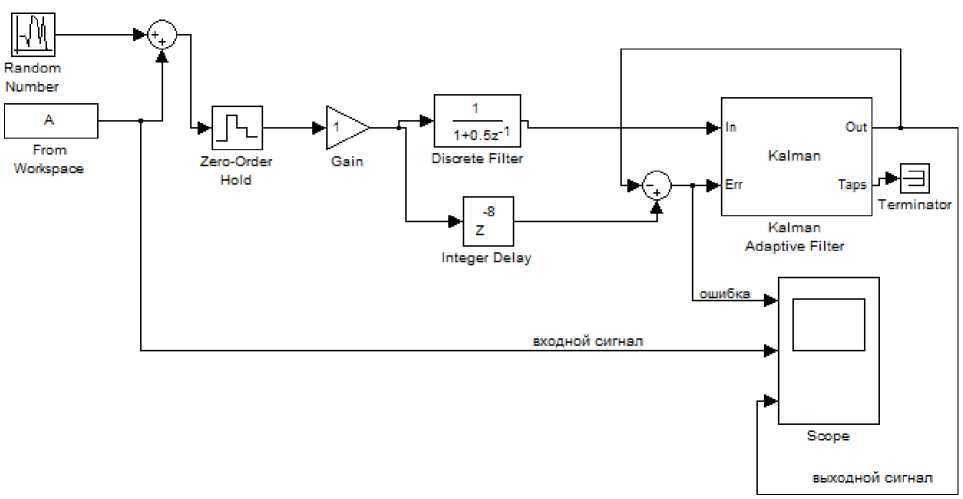
Рис. 1. Структурная схема моделирования фильтра Калмана
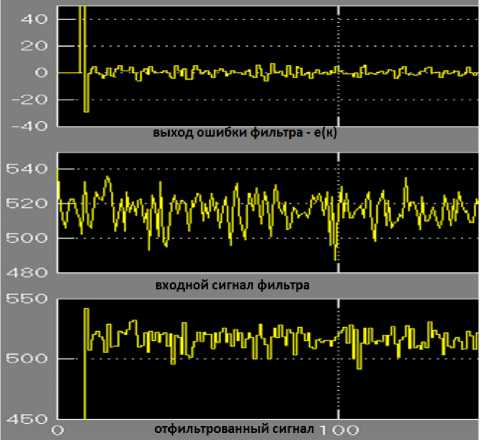
Рис. 2. Результаты моделирования фильтра Калмана
В данной работе также сконструирован прибор на базе микроконтроллера Ardiuno Mega, включающий в себя виброакустическое измерительное устройство и фильтр Калмана. Так как классическая форма реализации данного фильтра на этом микроконтроллере не представляется возможным, поэтому были использованы следующие алгоритмы:
xk = Fxk -1 + rk -1, где Xk - предсказание состояния системы в текущий момент времени;
X k - 1 - предсказание состояния в предыдущий момент времени.
Прогнозируемое значение ошибки ковариации:
P = FP k - 1 F T + Q r .
Здесь P k - предсказание ковариации ошибки; P - - ковариации ошибки в k - 1-м шаге; Q r - ковариации шума процесса.
Определение коэффициента усиления фильтра:
P * H T k , H * Pk * HT + R где Kk - коэффициент усиления фильтра; H - матрица, отображающая отношения измерений и состояний; R - ковариация шума измерения.
Обновление с учётом измерения текущего значения zk :
x k = x k K k *( z k -
H * x k ).
Обновление ошибки ковариации:
Pk = (I - Kk * H )* Pk, где I - единичная матрица связи.
Чтобы наглядно продемонстрировать эффективность фильтра Калмана, для задачи диагностики ДВС была произведена фильтрация виброакустического сигнала, которая от микроконтроллера Arduino Mega передается через порт UART компьютера (рис. 3) и записывается в программе Excel 2016.
Для чёткого приема сигнала от ДВС виброакустический датчик закреплен к корпусу двигателя автомобиля марки Opel Vectra выпуска 1997 г.

Рис. 3. Экспериментальная система измерения и фильтрации виброакустических сигналов ДВС автомобиля марки Opel Vectra
Было рассчитано среднеквадратическое отклонение для массива значений, измеренных с помощью виброакустического датчика, и оно составило R = 0,48 . А значение Q в соответствии с рекомендацией [5] равно 0,002.
Из приведённого графика (рис. 4) видно, как среднеквадратическая ошибка фильтра Калмана в процессе адаптации стремится к нулю, это указывает на то, что отфильтрованный сигнал приближается к своему истинному значению.
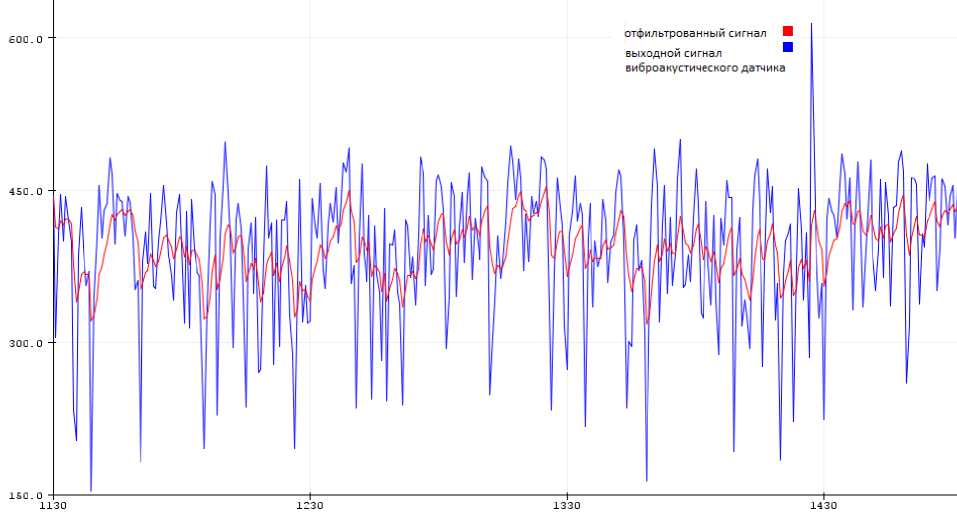
Рис. 4. Графики зашумленных и отфильтрованных виброакустических сигналов ДВС автомобиля марки Opel Vectra
Список литературы Применение фильтра Калмана в задаче технической диагностики двигателей внутреннего сгорания
- Адаптивные фильтры / под ред. К.Ф.Н. Коуэна и П.М. Гранта. - М.: Мир, 1988. - 392 с.
- Тофоли, Т. Машины клеточных автоматов / Т. Тофоли, Н. Марголус. - М.: Мир, 1991. - 280 с.
- Беркович, С.Я. Клеточные автоматы как модель реальности: поиски новых представлений информационных и физических процессов / С.Я. Беркович. - М.: Изд-во МГУ, 1993. - 112 с.
- Дьяконов, В. MATLAB. Анализ, идентификация и моделирование систем. Специальный справочник / В. Дьяконов, В. Круглов. - Спб.: Питер, 2002. - 448 с.
- Джалолов, У.Х. Регуляризация задачи идентификации объекта в условиях зашумленности полезного сигнала / У.Х. Джалолов, Р.М. Бандишоева, У.А. Турсунбадалов // Вестник Таджикского технического университета. - 2016. - № 1 (33). - С. 20-26.
- Компьютерная диагностика многокомпонентных вибрационных машин / Н.И. Юнусов, У.Х. Джалолов, Ш.Ш. Зиёев, У.А. Турсунбадалов // 10-я Международная конференция по компьютерному анализу проблем науки и технологии. МГУ имени М.В. Ломоносова, Филиал МГУ в г. Душанбе, 2015. - С. 124-127.
