Прототипирование мобильного робота с системой управления на основе компьютерного зрения для современного растениеводства

Автор: Шушков Р.А., Рапаков Г.Г., Казаков Д.А.
Журнал: АгроЗооТехника @azt-journal
Рубрика: Механизация, автоматизация и информатизация сельскохозяйственного производства
Статья в выпуске: 2 т.9, 2026 года.
Бесплатный доступ
В условиях глобальных вызовов, с которыми сталкивается сельское хозяйство (рост спроса на продовольствие, ограниченность ресурсов и ужесточение экологических требований), отечественное растениеводство и животноводство демонстрируют поступательный рост инновационной активности и высокие отраслевые темпы развития. Роботизация сельского хозяйства обеспечивает автоматизацию технологических процессов при снижении доли ручного труда и основывается на переходе к высокоточному, ресурсосберегающему и устойчивому растениеводству. Цель настоящего исследования – разработка системы управления на основе компьютерного зрения и создание функционирующего прототипа мобильного робота для современного растениеводства, демонстрирующего возможность автономного выполнения технологических операций по обработке почвы на основе навигации с использованием распознавания визуальных маркеров Aruco. Предложенная система технического зрения позволяет решить научно-технические проблемы: обеспечение стабильного движения по заданной маркерами траектории с возможностью ее оперативного планирования при ограниченных вычислительных ресурсах; использование доступных аппаратных платформ для решения задачи обработки почвы шнековым орудием с учетом достигнутой скорости перемещения автономного мобильного робота; снижение требований к квалификации оператора; использование алгоритмов и методов компьютерного зрения, которые обусловливают научную новизну исследования. В результате разработана надежная система управления автономным мобильным роботом с активным настраиванием скорости вращения шнекового устройства для задач растениеводства на основе подходов компьютерного зрения с учетом аппаратных ограничений и устойчивым удержанием запланированной траектории. Внедрение разработки при масштабировании проекта в агропромышленном комплексе региона позволит уменьшить затраты на ручной труд и расход ресурсов; повысить точность агротехнических операций и перейти к экологически безопасным технологиям за счет минимизации химической нагрузки и уплотнения почвы; создать основу для сбора данных точного земледелия и построения цифровых моделей полей. Дальнейшие перспективы исследований по проекту предполагают интеграцию разработки в агротехнологические процессы растениеводства с учетом требований региональных сельхозпроизводителей.
Искусственный интеллект, цифровая трансформация, агропромышленный комплекс, беспилотные технологии, система технического зрения, маркеры Aruco
Короткий адрес: https://sciup.org/147253807
IDR: 147253807 | УДК: 633/635:004.89 | DOI: 10.15838/alt.2026.9.2.7
Prototyping of mobile robot with computer vision-based control system for modern crop production
In the context of global challenges faced by agriculture (growing demand for food, limited resources and stricter environmental requirements), domestic crop and livestock production demonstrate a steady increase in innovation activity and high sectoral development rates. Robotization of agriculture provides automation of technological processes while reducing the share of manual labor and is based on the transition to high-precision, resource-saving and sustainable crop production. The aim of this study is to develop a computer vision-based control system and create a functioning prototype of a mobile robot for modern crop production, demonstrating the possibility of autonomous execution of technological operations for tillage based on navigation using Aruco visual marker recognition. The proposed vision system allows solving scientific and technical problems: ensuring stable movement along a trajectory set by markers with the possibility of its operational planning with limited computing resources.; the use of available hardware platforms to solve the problem of cultivating the soil with a screw tool, taking into account the achieved speed of movement of an autonomous mobile robot; reducing the requirements for operator qualifications; using computer vision algorithms and methods that determine the scientific novelty of the study. As a result, a reliable control system for an autonomous mobile robot has been developed with active adjustment of the rotation speed of the screw device for crop production tasks based on computer vision approaches, taking into account hardware limitations and stable retention of the planned trajectory. The implementation of the development during project scaling in the agro-industrial complex of the region will reduce the cost of manual labor and resource consumption; increase the accuracy of agrotechnical operations and switch to environmentally friendly technologies by minimizing chemical stress and soil compaction; create a framework for collecting precision farming data and building digital field models. Further prospects for research on the project involve integrating the development into agrotechnological processes of crop production, taking into account the requirements of regional agricultural producers.
Текст научной статьи Прототипирование мобильного робота с системой управления на основе компьютерного зрения для современного растениеводства
Перспективные подходы, основанные на внедрении управляемой техники в растениеводство, способны значительно повысить производство сельскохозяйственной продукции за счет встраивания агропромышленного комплекса (АПК) в систему новых технологий и использования передовых решений. Внедрение сельскохозяйственных роботов способствует решению вопроса обеспечения населения отечественными продуктами питания и дает возможность повысить экспортный потенциал, представляя собой инновационную точку роста в условиях нарастающего кадрового дефицита в отрасли (Архипова, Афонина, 2020). Разработка навигационных систем для управления современной сельскохозяйственной техникой, контролируемой бортовыми компьютерами, является основой создания умных интегрированных информационно-управляющих систем для растениеводства при точном выполнении агротехнических операций (Нагоев и др., 2024;
Tahir, 2022; Reina, Nielsen, 2018). В этом контексте автономные мобильные роботы представляют особый интерес, так как позволяют автоматизировать широкий спектр приемов агротехники: обработку почвы, посев и уход за ним, а также уборку урожая (Хамуков, Канокова, 2022; Романов, Романова, 2024; Astrand, Baerveldt, 2002).
Подпрограмма «Сельскохозяйственная техника и оборудование» Федеральной научно-технической программы развития сельского хозяйства на 2017–2030 гг. в числе задач содержит разработку, создание и внедрение в серийное производство современной конкурентоспособной высокоэффективной сельскохозяйственной техники и оборудования с использованием узлов и агрегатов, произведенных на территории Российской Федерации, в том числе с внедрением цифровых и роботизированных систем. Ожидаемые результаты реализации предполагают снижение уровня импортозависимости и повышение эффективности производства в отрасли растениеводства. Для этого комплексный план научных исследований подпрограммы «Сельскохозяйственная техника и оборудование» содержит требования к технологическим решениям в части технологии производства либо модернизации тракторов с возможностью опционального оснащения беспилотными системами.
Применение беспилотных летательных аппаратов (БПЛА) при производстве сельскохозяйственных культур в задачах растениеводства позволяет обеспечивать сопровождение агронома при объезде угодий; выполнять мониторинг работы техники в реальном масштабе времени; оптимизировать маршруты перемещения по полям; формировать цифровую модель рельефа; собирать пространственные данные для анализа состояния почвы и о наличии сорной растительности с последующей обработкой пораженных участков пестицидами с воздуха; проводить дифференцированное внесение удобрений (Васильев, Затылков, 2019; Горелов и др., 2024; Шушков, Рапаков, 2025).
Практика применения БПЛА показала, что они обладают преимуществом в скорости обследования больших сельскохозяйственных площадей при работе на труднодоступных участках и предлагают приемлемую стоимость выполнения мониторинга. Наземные автономные роботы с компьютерным зрением имеют очевидные достоинства в точности выполнения операций при физическом воздействии на растения и почву, обеспечивая большую энергоэффективность (Рамеш Бабу и др., 2017; Минина, 2019; Погребцо-ва, 2021). Разумной стратегией представляется создание гибридных систем, где БПЛА обеспечивают оперативный мониторинг и выявление проблем, а автономные мобильные роботы (АМР) выполняют точную и адресную обработку выявленных проблемных зон. Совместное использование наземных и воздушных беспилотных технологий в современном растениеводстве позволит организовать единую экосистему точного земледелия, в которой БПЛА эффективно вписываются в агропроизводство (Башилов, Королев, 2023). В долгосрочной перспективе наземная робототехника имеет больший потенциал при цифровой трансформации растениеводства, позволяя полностью автоматизировать как мониторинг, так и все технологические операции в ходе цикла выращивания растений.
Актуальность исследования по разработке АМР для обработки почвы в современных экономических и технологических условиях обусловлена:
– необходимостью автоматизации сельского хозяйства;
– трендом на прецизионное растениеводство c повышением экономической эффективности на основе роботизации (автоматизация снижает операционные расходы на рабочую силу и увеличивает рентабельность производства);
– нехваткой сельскохозяйственного персонала для выполнения монотонных операций (Мясников, 2018; Папушин, 2019).
Центральным элементом архитектуры системы управления (СУ) автономного мобильного робота является подсистема компьютерного зрения. СУ обеспечивает автономность перемещения робота при выполнении агротехнических операций в теплицах и на открытом грунте при междурядной обработке и рыхлении, минимизируя вмешательство человека; высокую эффективность с охватом всей площади посадок за ограниченное время; безопасность при взаимодействии с растениями, персоналом и инфраструктурой; надежность работы в условиях повышенной влажности и запыленности; производительность при перемещении требуемых объемов полезной нагрузки; простоту обслуживания при ремонте и замене комплектующих. Разработка АМР представляет собой комплексный проект на стыке робототехники, компьютерного зрения и аграрных технологий (Петрасек, Длоугый, 2013; Гильфанов и др., 2023).
Цель исследования – разработка системы управления на основе компьютерного зрения при помощи Aruco-маркеров для точного позиционирования и навигации автономного мобильного робота в задаче создания его функционирующего прототипа для нужд современного растениеводства.
Указанная цель послужила основой для постановки и решения следующих задач:
– провести анализ существующих технических решений в области автономной навигации мобильных роботов в сельском хозяйстве;
– разработать архитектуру и выбрать компонентную базу системы технического зрения (СТЗ) для робототехнического комплекса, включая сенсоры и систему управления;
– реализовать алгоритмы компьютерного зрения для детекции, идентификации и определения пространственного положения Aruco-маркеров относительно робота и разработать программное обеспечение (ПО) с использованием библиотек OpenCV на языке программирования Python;
– разработать систему навигации и управления движением АМР, обеспечивающую перемещение робота от стартовой точки к целевой зоне и последующее возвращение в исходное положение по заданному маршруту с коррекцией положения по маркерам;
– спроектировать и интегрировать управление скоростью вращения шнека, обеспечивающее эффективное выполнение целевой операции;
– провести комплексные испытания прототипа с оценкой точности навигации, надежности выполнения задачи и автономности работы.
Объектом исследования является система автономной навигации в задаче прототипирования мобильного робототехнического комплекса, основанная на распознавании визуальных маркеров Aruco при помощи компьютерного зрения. Предмет исследования – алгоритмы и методы компьютерного зрения, аппаратно-программные решения для автономной навигации и управления мобильным роботом, в том числе в условиях ограниченного пространства сельскохозяйственного помещения, с использованием СТЗ.
Материалы и методы
Проблема разработки автономного мобильного робота на основе компьютерного зрения активно исследуется в последние годы (Шушков, Рапаков, 2025). Подходы при помощи метода с одновременной локализацией и построением карты SLAM (Simultaneous Localization and Mapping) и нейронных сетей (НС) обеспечивают высокую автономность, но требуют значительных вычислительных ресурсов и сложны в разработке, настройке, тестировании и эксплуатации. Использование маркеров Aruco предлагает компромиссное решение для надежного позиционирования и навигации на открытом грунте и в условиях теплиц. Альтернативный подход к созданию СУ АМР вместо сложных систем SLAM и семантической сегментации отличается меньшей вычислительной сложностью и высокой надежностью позиционирования, особенно в структурированной среде сельскохозяйственных помещений при отсутствии GPS-сигнала.
Существующие решения можно разделить на несколько сегментов по уровню автоматизации и используемым технологиям. Результаты сравнительного анализа представлены в табл. 1 .
Предлагаемое решение построения СУ АМР на основе СТЗ с Aruco-маркерами является конкурентоспособным, эконо-
Таблица 1. Сравнительный анализ современных подходов
|
Метод |
Описание |
Достоинства |
Недостатки |
|
Механические решения (без автоматизации) |
Простые и дешевые устройства. Не являются автономными роботами. |
Низкая стоимость. Высокая надежность и простота конструкции. Не требуют питания и сложного обслуживания. |
Требуют ручного труда или использования трактора. Низкая эффективность, непостоянство выполнения. Не адаптируются к изменяющимся условиям. |
|
Роботы с инерциальной навигацией и одоме-трией |
Робот движется, запоминая свой путь с помощью энко-деров на колесах и данных с IMU (инерциального измерительного модуля). Может использовать точки выравнивания. |
Не требуют внешней инфраструктуры. Низкая стоимость сенсоров. |
Накопление ошибки: ошибка позиционирования со временем растет, и робот теряет свое местоположение. Требуют ручной коррекции. Ненадежны в условиях проскальзывания колес. |
|
Роботы на основе GPS (для открытых территорий) |
Используют спутниковые системы позиционирования. Неприменимы для закрытых помещений сельскохозяйственного назначения, в том числе теплиц. |
Глобальное покрытие на открытой местности. Высокая точность с системами RTK-GPS. |
Не работают внутри помещений. |
|
Роботы на основе LiDAR SLAM |
Современный и популярный подход для автономной навигации, особенно в помещениях. Робот с помощью лидара строит 2D/3D карту помещения и локализуется с ее помощью. |
Высокая гибкость – не требуют внешней инфраструктуры. Маршруты задаются программно и легко меняются. Надежная навигация –отлич-но справляются с объездом статических и динамических препятствий. Универсальность – одна платформа может выполнять разные задачи. |
Высокая стоимость: самый дорогой компонент – качественный лидар. Сложность: алгоритмы SLAM требуют значительных вычислительных мощностей и квалификации для настройки. Проблемы с динамической средой – если среда сильно меняется, то карта теряет актуальность. Плохо работает в запыленных помещениях. |
|
Компьютерное зрение при помощи маркеров Aruco |
Предлагаемое решение. Локализация происходит при помощи визуальных маркеров, размещенных в помещении или на открытом пространстве. Используется в робототехнике для точного позиционирования с привязкой к среде. Является перспективной нишей для системы технического зрения на сельскохозяйственных фермах. |
Высокая и стабильная точность позиционирования в зоне видимости маркеров. Отсутствие накопления ошибки по сравнению с одометрией. Относительно низкая стоимость (т. к. камера дешевле лидара). Удобство реализации и отладки (OpenCV – детекция маркеров). С помощью камеры можно получать данные мониторинга о состоянии растений. |
Требует подготовленной инфраструктуры – необходимо разметить среду маркерами. Зависимость от обзора – маркеры могут быть закрыты или запачканы. Зависимость от освещения – требуется собственная подсветка для работы в темноте. Ограниченный радиус действия – постоянная видимость маркеров. |
|
Источник: составлено авторами. |
|||
мически обоснованным и технически реализуемым вариантом для задачи разработки прототипа мобильного робота, особенно при агротехнических мероприятиях в структурированной среде.
Архитектура СУ прототипа АМР строится на компонентах:
– аппаратного уровня (колесное шасси, одноплатный компьютер или мини-ПК, RGB-камера с требуемым углом обзора и автофокусом, контроллер двигателей и периферийного оборудования);
– программного уровня (операционная среда и программные драйверы для свя- зи между модулями, библиотеки OpenCV для обработки изображений и детектирования Aruco, регуляторы для управления движением).
Использование системы Aruco-маркеров предполагает:
– изучение размещения маркеров (равномерное распределение маркеров вдоль траектории перемещения АМР, выбор размера маркеров – 170×170 мм, расстояние при размещении между маркерами – 2–3 м, высота установки – 1–1,5 м);
– калибровку элементов СТЗ (камеры для минимизации ошибок, определение системы координат относительно маркеров, составление карты расположения маркеров).
Алгоритм работы системы предполагает:
– режим инициализации (калибровка камеры для получения матрицы внутренних параметров камеры и коэффициентов дисторсии; определение начального положения МАР; поиск и идентификация ближайших маркеров);
– режим обработки почвы шнековым устройством при движении по маршруту (обнаружение маркеров с использованием методов компьютерного зрения; позиционирование относительно ближайшего маркера; выполнение обработки в ходе движения; возврат на базу с последующим переходом в циклический режим).
Основными преимуществами предложенного подхода являются:
– вычислительная эффективность: детектирование Aruco-маркеров требует малых вычислительных ресурсов;
– отказ от трудоемкой семантической сегментации с использованием затратных сверточных нейронных сетей (CNN) различной архитектуры, требующих качественного обучения на размеченном наборе данных (Dataset) из тысяч изображений для конкретной сельскохозяйственной фермы и условий эксплуатации;
– быстрая обработка на бюджетном оборудовании;
– надежность позиционирования (точность определения положения не хуже 10 см, лучшая стабильность при изменении освещенности, устойчивость к частичному перекрытию маркеров);
– удобство эксплуатации (минимальные требования к обучению персонала, оперативное развертывание системы, быстрая отладка и обслуживание).
Ограничения существующих разработок: зависимость от видимости маркеров, необходимость их предварительной установки, ограниченная гибкость при изменении компоновки территории. Пути решения: резервная навигация по одо-метрии при потере маркеров, увеличение количества маркеров для повышения надежности, проведение рекалибровки. Предлагаемая разработка СУ на основе маркеров Aruco обеспечивает высокую эффективность и надежность в задаче автономной обработки почвы при помощи шнекового устройства с активным управлением скоростью вращения. Подход особенно перспективен для небольших и средних хозяйств, где важны простота внедрения и низкая стоимость решения. К перспективам развития относятся использование гибридной навигации (Aruco с одометрией), применение простых CNN-алгоритмов обнаружения растений, интеграция с системами мониторинга умной фермы. Разработка автономного мобильного робота на основе компьютерного зрения при помощи маркеров Aruco представляет собой практичный компромисс между сложностью и функциональностью, предлагая надежную систему автоматизации для современного растениеводства.
Результаты и обсуждение
В ходе выбора аппаратно-программной архитектуры АМР при прототипирова- нии и проведении научных исследований для визуализации и управления может быть использован Windows-интерфейс, который обеспечивает единую среду разработки и выполнения, доступ к специфичным Windows-API, упрощенную интеграцию с промышленным ПО.
Технологический стек для Windows-реализации основан на возможностях использования:
– операционной системы (ОС) и среды выполнения ПО Windows 10/11 IoT Enterprise; преимущества: стабильность и широкая поддержка оборудования; недостатки: высокие требования к ресурсам и лицензионные ограничения; ОС также применима для промышленных контроллеров с достаточными ресурсами;
– фреймворков и библиотек компьютерного зрения OpenCV на ОС Windows;
– семейства API для работы с графикой, видео и вычислениями – DirectX и шейдеров, позволяющих использовать GPU для задач общего назначения с высокой производительностью.
При необходимости обеспечения доступа к ROS-стеку также может быть использован слой совместимости от Microsoft для запуска Linux-приложений в Windows – Windows Subsystem for Linux (версия WSL 2).
Аппаратные требования для организации СУ:
– минимальная конфигурация мини-ПК: CPU Intel i5 8-го поколения (AMD Ryzen 5), RAM 8 ГБ DDR4, SSD 256 ГБ; GPU NVIDIA GTX 1050 (для поддержки CUDA);
– рекомендуемая конфигурация мини-ПК: CPU Intel i7 (AMD Ryzen 7), RAM 16 ГБ DDR5, SSD M.2 NVMe 512 ГБ, GPU NVIDIA RTX 2060 или выше;
– эксплуатационные характеристики: надежность работы в условиях вибрации, влажности и перепадов температур; степень защиты IP40.
Для промышленного применения удачным решением также является использование одноплатных компьютеров NVIDIA Jetson Nano.
В состав аппаратного обеспечения входят:
– микроконтроллер и внешний компьютер; микроконтроллер Arduino Mega 2560 управляет моторами; выделенный мини-ПК отвечает за компьютерное зрение;
– система компьютерного зрения: камера с разрешением не менее 1080p (Full HD); рекомендуется использовать камеру с глобальным затвором, чтобы избежать размытия при движении, и автофокусом;
– собственная система освещения (подсветка для обеспечения независимости от изменчивого внешнего освещения в помещении).
Модули программного обеспечения включают:
– модуль компьютерного зрения (Aruco Detection) в составе библиотеки OpenCV с модулем Aruco; модуля калибровки камеры (проводится для точного определения позиции по маркерам, результатом которого является матрица внутренних параметров камеры и коэффициентов дисторсии); модуля детекции маркеров (на каждом этапе движения в кадре ищутся маркеры известного словаря DICT_6X6_250);
– модуль навигации и планирования пути: локализация АМР выполняется на основе данных от Aruco-маркеров, которые служат маяками для коррекции накопленной ошибки движения;
– модуль управления движением: преобразует высокоуровневые команды в низкоуровневые сигналы широтно-импульсной модуляции (ШИМ, PWM) для драйверов моторов.
[Камера]— ► [Детекция]— ► [Трекинг]— ► [Команда контроллеру]— ► [Действие]
Рис. 1. Блок-схема решения
Источник: составлено авторами.
Разработка СТЗ предполагает размещение маркеров на стенах (колоннах, потолке), детекцию Aruco и локализацию АМР (программирование на Python), тестирование и отладку в контролируемых условиях, калибровку регуляторов и улучшение работы алгоритмов. Поскольку рабочая зона всегда определена относительно маркеров, робот автоматически перемещается к ней в ходе движения по маршруту. Блок-схема решения представлена на рис. 1 .
Программное обеспечение для автономной навигации и управления АМР с использованием СТЗ на основе Aruco-маркеров написано на языке программирования Python. ПО управляет движением автономного мобильного робота посредством автоматического распознавания маркеров Aruco и выполняет следование по маршруту при помощи системы технического зрения в ходе обработки видеопотока с бортовой камеры АМР. Для прототипирования выбрана гибридная вычислительная архитектура на основе мини-ПК под управлением ОС Windows и микроконтроллера Arduino Mega 2560.
Функциональные особенности ПО:
– подключение к камере и вывод изображения на 7-дюймовый ЖК-монитор системы видеоконтроля;
– ПО распознает Aruco-маркеры словаря DICT_6X6_250, содержащего 250 маркеров размером 6×6 бит, в реальном масштабе времени;
– программа обеспечивает навигацию АМР, переводя координаты маркеров в команды управления роботом с погрешностью, необходимой для выполнения целевой операции.
Функции библиотеки алгоритмов компьютерного зрения и обработки изображений с открытым кодом OpenCV используются для обработки изображений, детектирования маркеров и вывода изображение на ЖК-экран. Для идентификации маркеров применяется функционал библиотек компьютерного зрения Aruco Detection. При программной навигации АР используется передача команд микроконтроллеру Arduino Mega 2560 для управления моторами при помощи ШИМ-сигналов. Программирование микроконтроллера выполняется с использованием интегрированной среды разработки для плат Arduino – Arduino IDE. Библиотека OpenCV отвечает за интерфейс ПО, который содержит данные с камеры робота. Использование Aruco Detection позволяет обработать видеопоток и распознать маркеры. Результаты детекции передаются для управления АР с требуемой точностью позиционирования и OpenCV для наглядного отображения. Блок-схема работы программного обеспечения СУ автономного робота представлена на рис. 2 .
Комплексные испытания для оценки эффективности разработки включали два этапа: тестирование отдельных подсистем с целью анализа точности детекции маркеров при помощи текущей камеры и заключения о надежности работы приводов; испытание прототипа для оценки характеристик АМР, таких как точность навигации, надежность выполнения задачи и автономность работы.
Общие условия проведения испытаний: давление 101325 Па; температура +23 °С; относительная влажность 65%; освещение 300–1000 лк; воздушная пыль. Ограниче-
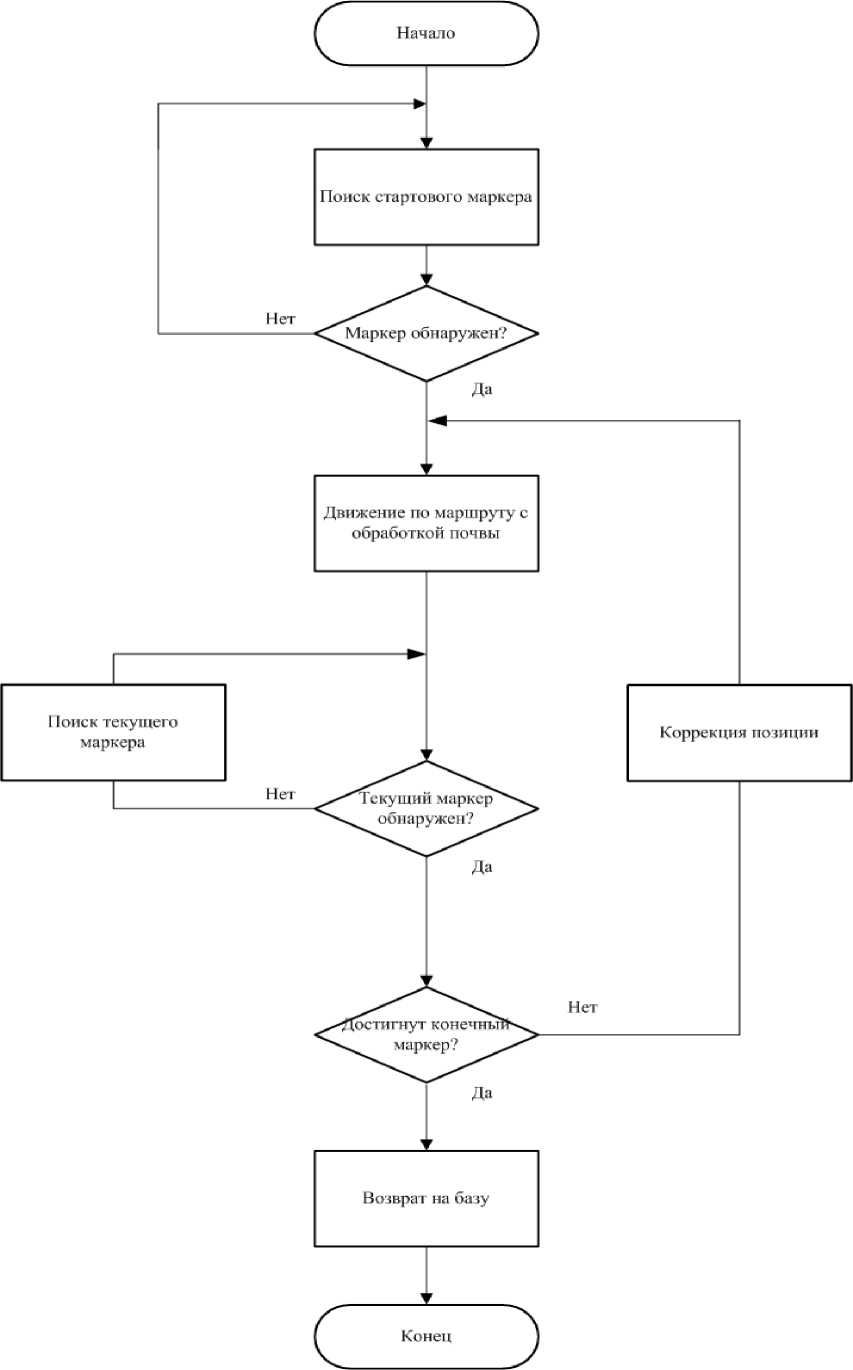
Рис. 2. Блок-схема работы программного обеспечения
Источник: составлено авторами.

Рис. 3. Тестирование системы управления прототипа мобильного робота ния: наличие предварительно размещенных маркеров Aruco; отсутствие преднамеренного физического воздействия на робота. Допущения: конфигурация помещения – неизменна. Тестирование СУ прототипа АМР представлено на рис. 3.
Одним из критических факторов, влияющих на точность системы управления на основе компьютерного зрения в закрытых помещениях сельскохозяйственного назначения, является освещенность. Ее уровень в сельскохозяйственных условиях может варьироваться в широких пределах: 300–500 лк (утренние и вечерние часы); 500–800 лк (дневное время, пасмурно); 800–1000 лк (дневное время, солнечно); 400–800 лк (искусственное освещение в теплицах). Для надежной работы агроробота необходимо обеспечить стабильную точность позиционирования во всем диапазоне рабочих освещенностей. Испытания прототипа проводились в контролируемых и управляемых условиях, приближенных к реальным, с оценкой точности и надежности навигации, эффективности выполнения целевой операции, времени автономной работы и общей надежности системы. При тестировании использовались двумерные двоичные шаблоны Aruco и портативный люксметр для измерения уровня освещенности в помещениях и на улице Testo 540. Выполнялось пошаговое изменение освещения: 300 лк; 400 лк; 500 лк; 600 лк; 800 лк; 1000 лк. Для каждого уровня освещенности (n = 30) оценивалась точность позиционирования при расстоянии до маркера 3 м. Статистический анализ показал, что распределение ошибок подчиняется нормальному закону; 95% ошибок в пределах ±6,8 см; выбросы (> 3σ) – 0,6% измерений. Тестирование демонстрирует, что при освещенности 300 лк из-за снижения контрастности и увеличения уровня шума изображения точность падает на 60–80% по сравнению с 500 лк; оптимальный диапазон: 500–800 лк; при 1000 лк наблюдается незначительное ухудшение из-за появления бликов, насыщения пикселей в светлых участках изображения и снижения динамического диапазона. Для компенсации предлагается автоматическая регулировка экспозиции, гистограммная коррекция, оптические поляризационные и ND-фильтры, активная LED-подсветка, камера с глобальным затвором, лидар, работа в ИК-диапазоне, сезонная калибровка.
Результаты испытаний соответствуют техническим требованиям к системе управления мобильного робота для выполнения технологических операций в современном растениеводстве. Функциональные критерии: робот автономно выполняет полный цикл «старт – поиск маркеров – целевая операция – возврат» при регулируемой скорости вращения шнека; точность позиционирования – не менее
10 см; вероятность успешного выполнения цикла – не менее 95%. Эксплуатационные критерии: время непрерывной работы – не менее 60 мин.; надежность распознавания маркеров более 95%.
Выводы
Результаты проведенных исследований демонстрируют следующее:
– использование навигации по оптическому каналу на основе Aruco-маркеров в задаче управления движением автономного мобильного робота является перспективным направлением в ходе решения задач растениеводства по обработке почвы за счет сочетания возможностей компьютерного зрения и робототехники, что подтверждается данными тестиро- вания изготовленного прототипа в ходе проведения испытаний;
– результатом разработки является аппаратно-программный продукт с системой управления для обеспечения автономной навигации мобильной робототехнической платформы в реальном масштабе времени на основе алгоритмов и методов компьютерного зрения с учетом аппаратных ограничений, что обусловливает научную новизну исследования;
– практическая значимость работы определяется возможностями применения системы автоматической навигации для оптимизации издержек на обработку почвы шнековым орудием в задачах растениеводства с перспективой быстрой окупаемости.
