Расчет характеристик ускоренного движения автомобиля по дороге со случайным микропрофилем

Автор: Полосков И.Е.
Журнал: Вестник Пермского университета. Математика. Механика. Информатика @vestnik-psu-mmi
Рубрика: Механика. Математическое моделирование
Статья в выпуске: 2 (49), 2020 года.
Бесплатный доступ
В работе для моделирования и анализа движения транспортного средства с переменной скоростью по неровной дороге используется схема, учитывающая наличие запаздывания и сочетающая метод шагов с расширением пространства состояний. Приведены результаты расчетов, выполненных в среде математического пакета Mathematica.
Моделирование, транспортное средство, характеристики колебаний, стохастическое обыкновенное дифференциальное уравнение, расширение пространства состояний
Короткий адрес: https://sciup.org/147246566
IDR: 147246566 | УДК: 519.2 | DOI: 10.17072/1993-0550-2020-2-32-38
Calculation of characteristics of accelerated car movement on roads with random microprofiles
In this paper, to modeling and analyze the movement of a vehicle with variable speed on rough roads, a scheme is used that takes into account the presence of delay and combines the method of steps with an expansion of the state space. The results of calculations performed in the environment of the mathematical package Mathematica are demonstrated.
Текст научной статьи Расчет характеристик ускоренного движения автомобиля по дороге со случайным микропрофилем
Как правило, механические и математические модели систем автомобилей формируются в форме сложных многомассовых колебательных систем [1]. Из-за дорожного возбуждения транспортные средства (ТС) могут подвергаться сложной вибрации, что неблагоприятно для здоровья пассажиров и сохранности товаров. Поэтому важными и актуальными задачами являются оценки и контроль колебаний транспортных средств в пределах комфортной зоны, чтобы обеспечить безопасное рулевое управление и физическое здоровье водителей и пассажиров, а также стабильность работы системы человек-автомобиль-дорога. В процессе движения автомобиля случайное и изменчивое дорожное покрытие является основным фактором, вызывающим вибрацию автомобиля. Таким образом, исследование стохас-
тической вибрации транспортного средства, вызванной дорожным возбуждением, является серьезной проблемой при проектировании транспортного средства и моделировании его характеристик.
Наряду с учетом нерегулярности дорожного полотна [2] уже давно признано необходимым принимать во внимание и запаздывание воздействия случайного микропрофиля на одну или несколько пар задних колес ТС относительно передних [3,4]. Еще недавно динамика как в линейной, так и нелинейной постановке изучались без учета протяженности ТС, а следовательно, и эффекта запаздывания [5]. Дело в том, что этот учет является нетривиальной задачей, так как запаздывание превращает стохастическую систему в немарковскую. Но в широком диапазоне скоростей пренебрежение запаздыванием приводит к завышению дисперсии ускорения подрессоренной массы, особенно на резонансной скорости движения. С другой стороны, в работе [6] показано, что введение в модель управляющего устройства временного запаздывания между передними и задними колесами улучшает динамические характеристики ТС.
Для анализа движения ТС с переменной скоростью используется алгоритм, представленный в работах [7,8].
1. Модель ТС
Рассмотрим движение ТС в вертикальной плоскости. Схема этого ТС изображена на рис.1, состоит из движущейся массы т, подвешенной на двух колесах и моделируется системой с двумя степенями свободы. Предполагается, что в процессе движения подвеска остается вертикальной.
Обозначим через Y ( t ) смешение центра масс из положения статического равновесия (соответствующего у о), а через & ( t ) - угол наклона корпуса ТС ( t - время). Пусть U = U ( s ) - функция, характеризующая профиль дороги ( s = r ( t ) - пройдет ihih путь). G - центр масс, ki и ci - коэффициенты жесткости и демпфирования ( i = 1 , 2). Тогда уравнения движения будут иметь вид [5]:
mY(t ) + c 1 Z i + c 2 Z 2 + k 1 Z i + k 2 Z 2 =
= mg,(1)
-
■ V ■■
-
I& + C 1 1 1 Z 1 - C 2 1 2 Z 2 + k 1 1 1 Z 1 -
- - k 2 12 Z2 = 0,( 2 )
где I - момент инерции ТС относительно центра масс, g - ускорение свободного падения, а точками обозначены производные по времени.
Из уравнений (1), (2) следует, что в состоянии покоя ( I = 1 1 + 1 2)
ℓ2 m g ℓ1 m g z10 = ~lkT ’ z20 = ~1кГ ’ а следовательно,
12 z 10 +11 z20 mg с 12 , Ih y0 = I = 12 \k1 + k2) ’ q0 = z 10 — Z20 = mg ^ 12 - 11 j
y ( t ) = 1 2 [ Z 1( t )+ U 1( t )] +
1 1 [ Z 2( t )+ U 2 ( t )]
+ I y 0 ,
& ( t ) = Z 1( t ) + U 1( t ) — Z 2( t ) — U 2( t ) - Q 0
где
U1( t ) = U(s 1( t)), U2( t ) = U(s2( t)), s2(t) = s 1(t) - I, откуда следует, что
Z 1( t ) = y 0 + Y ( t ) + 1 1 [ Q 0 + & ( t )] - U 1( t ) ,
Z 2( t ) = y 0 + Y ( t ) - 1 2 [ Q 0 + & ( t )] - U 2( t ) •
Это позволяет записать уравнения (1), (2) в виде:
X 1( t ) = X 2 ( t ) ,
X 2( t ) =
-
- ( c 11 + c 12) X 2( t ) - ( c 11 1 1 - c 12 1 2) X 4( t ) -- ( k 11 + k 12) X 1( t ) - ( k 11 1 1 - k 12 1 2) X 3( t ) + + c 11 U 1( t ) + c 12 UJ 2( t ) + k 11 U 1( t ) + k 12 U 2( t ) , X 3 ( t ) = X 4 ( t ) , (3)
X 4( t ) =
-
- ( c 21 + c 22) X 2( t ) - ( c 21 1 1 - c 22 1 2) X 4( t ) -- ( k 21 + k 22) X 1( t ) - ( k 21 1 1 - k 22 1 2) X 3( t ) + + c 21 U 1( t ) + c 22 U 2( t ) + k 21 U 1( t ) + k 22 U 2( t ) •
где
-
c 11 = —, c 12 = —, k 11 = —, k 12 = —,
mmmm c1 ℓ1
c 21 = c 22 = k1 ℓ1
k 21 = k 22 =
Форма фильтра, формирующего неровности пути, выбрана в виде [9]:
U‘‘ ( s ) +2 a U‘ ( s ) + w 2 U ( s ) = g 0 V * ( s ) , g 2 =4 aw 2 a 0 ,
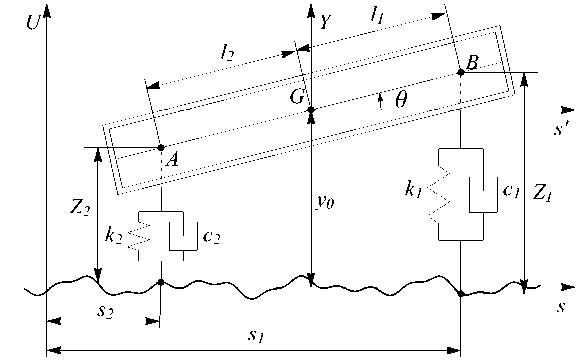
Рис. 1
где V* ( s ) - белый шуг i переменной s. При этом отклик U ( s ) будет иметь ковариационную функцию
K u ( s ) = а 0 e
~alsl (cos ш о s + — sin ш о |s| ) , ω 0
ш2 = ш 2 + а2, где а о = const - стандарт микропрофиля до роги.
Если перейти в уравнении фильтра от переменной s к времени t в предположении, что s = r ( t ) - монотонно возрастающая функция времени ( s = v ( t ) > 0), то система стохастических обыкновенных дифференциальных уравнений (СОДУ), представляющая преобразованный фильтр, будет иметь вид:
В случае постоянного положительного ускорения a = а о > 0 и анализа периода разгона ТС скорость движения v ( t ) выразится «формулой v ( t ) = а о t + v о ( v о = const, t > 0). а система уравнений фильтра (4) принимает следующий вид:
U Z1( t ) = к( t ) U 2( t ) ,
UU 2( t ) = — к( t ) [2 aU 2 ( t ) + ш 2 U 1 ( t )] + (о)
+ gо /к(t) V(t), причем (sо = const)
s = r (t) = 02° t2 + v о t + s о, t = ^(s) = —vо + /vо + 2 aо (s — sо) a0 ,
/ ( s ) = /2 / / a = “7Д = Ф ( t ) ’
У v о + 2 а о ( s — s о) к( t )
k( t ) = У а о t 2 + 2 а о v о t + v 2 = а о t + v о .
Обозначая U 1( t ) nej>ез X 5( t ). a U 2( t ) через X 6( t ) и ограничиваясь последним случаем переменной скорости ТС, запишем уравнения движения в матрично-векторной форме:
X ( t ) = Q ( t ) X ( t ) + H ( t ) X ( t — T )
+ G ( t ) V ( t ) , t> 0 ( 1 1 =0) , ( 6 )
|
где t = l/v ( t ), |
||
|
■ 0 1 0 0 0 0 |
||
|
q 21 q 22 q 23 q 24 k 11 c 11 |
||
|
0001 0 0 |
||
|
Q ( t ) = |
||
|
q 41 q 42 q 43 q 44 k 21 c 21 |
||
|
0 0 0 0 0 k( t ) |
||
|
_ 0 0 0 1 — k( t ) ш 2 — 2 k( t ) a |
||
|
■00000 0 ’ |
||
|
0 0 0 0 k 12 c 12 |
||
|
00000 0 |
||
|
H ( t ) = |
0 0 0 0 k 22 c 22 ’ |
|
|
00000 0 |
||
|
0000 0 0 |
||
G (t) =[0 0 0 0 0 g о y/Kd ]T, q 21 = — (k 11 + k 12), q 22 = - (c 11 + c 12), q23 = — (k 11 11 — k 12 12), q41 = — (k21 + k22), q24 = — (c 11 11 — c 12 12), q42 = — (c21 + c22), q43 = — ( k 21 11 — k 22 12), q44 = — (c 21 11 — c 22) 12).
2. Метод и результаты исследования
Для исследования поведения ТС использовалась модификация схемы, сочетающей метод шагов и расширение пространства состояний [10]. Для ее применения переменное запаздывание т ( t ) приближенно заменялось кусочно-постоянным т(t ) со "ступеньками", длина которых кратна величине т* (выбор т* определяется необходимой точностью ап-прокспмащш т ( t )).
Для финализации подготовки расчетов необходимо задать начальные условия для расчетов. Эти условия будут выглядеть так: предположим, что при t < 0 состояние ТС характеризуется соотношениями X 1( t ) = X 2( t ) = X з( t ) = X 4( t ) = 0. выходные переменные фильтра X 5( t ) и X 6( t ) находятся в стационарном состоянии, имея совместное нормальное распределение с параметрами
Е [ X 5( t )] = Д X б( t )] = 0 , Е [ X 2( t )] = а 2 ,
Е [ X 5( t ) X б( t )] = 0 , Е [ X 2( t )] = а 2 ш 2 .
Все это позволяет считать матрицы Q q, H о и G о [Ю] нулевыми.
Многошаговый численно-аналитический алгоритм вычисления искомых характеристик был реализован с помощью пакета Ма-thematica, обладающего мощным командным языком высокого уровня со всем необходимым инструментарием (в нашем случае это средства для проведения длинных аналитических выкладок, работы с символьными строками, списками объектов различных типов и рациональной арифметикой, построения графиков таблично заданных функций, численного решения систем ОДУ, вывода результатов символьных преобразований на дисплей в обычной математической форме и итогов расчетов на внешний носитель, интерактивного и пакетного режимов работы и др.), и состоял из циклической последовательности следующих шагов:
-
- расширение вектора состояния, формирование списка новых первых моментов и подготовка начальных условий;
-
- символьное построение системы ОДУ для векторной функции математических ожиданий и матрицы функций ковариации;
-
- численное интегрирование построенной системы ОДУ;
-
- сохранение результатов вычислений в конце каждого шага длиной т для дальнейших вычислений.
Таблица 1
|
N |
Дорога |
а 2 • 10 4 (м 2) |
α |
ω 0 |
|
1 |
Грунтовая |
2.3 |
0.0148 |
0.03342 |
|
2 |
Асфальтовое шоссе |
1.0 |
0.0500 |
0.60000 |
|
3 |
Булыжное шоссе |
3.2 |
0.3000 |
1.00000 |
Таблица 2
|
N |
m (кг) |
c 1 (нс/м) |
c 2( нс/м) |
k 1(н/м) |
|
1 |
17800 |
80000 |
80000 |
4.00-106 |
|
2 |
13200 |
16000 |
18000 |
4.65-105 |
|
3 |
8444 |
9080 |
9080 |
2.72-105 |
|
N |
k 2(н/м) |
1 (к юм 2) |
1 1(м) |
1 2(м) |
|
1 |
4.00-106 |
930.0 |
2.000 |
2.000 |
|
2 |
5.24-105 |
3000.0 |
2.340 |
2.885 |
|
3 |
8.53-105 |
12446.2 |
2.590 |
3.290 |
Таблица 3
|
Автомобиль ( k) |
Номер фазовой координаты ( i) |
|||
|
1 |
2 |
3 |
4 |
|
|
I |
2 |
5 |
8 |
11 |
|
II |
3 |
6 |
9 |
12 |
|
III |
4 |
7 |
10 |
13 |
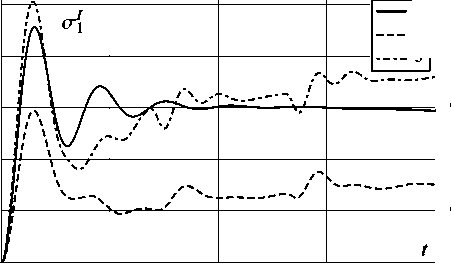
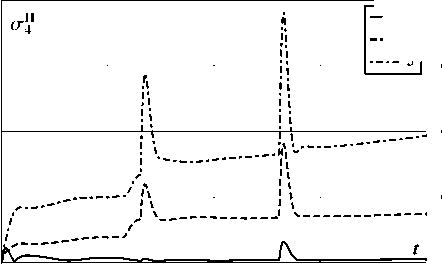
Параметры дорожного микропрофиля выбирались из табл. 1 [11], а ТС - из табл. 2 [5,12-14].
Движение же рассматривалось равноускоренным, причем в начальный момент времени скорость составляла 8 м/с. Ускорение было выбрано так, чтобы к концу третьей секунды скорость была равной 16 м/с. Элементарное запаздывание вычислялось делением расстояния между колесами автомобиля на конечную скорость и еще на константу, в качестве которой в расчетах использовалось значение 4. При этом начальное множество совпадало с отрезком [—8 т*, 0], что потребовало задавать нулевыми мат-рипы Q о( t). H q( t) 11 G q( t) на 8 шагах, а на основном участке до достижения времени движения в 2 с для первого автомобиля требовалось осуществить расчеты на 32 этапах, для второго - на 25, а для третьего - на 22. Соответствующие значения т* равнялись 0.0625 с, 0.0816406 с и 0.091875 с.
На рис. 2-13 показано поведение функций среднеквадратичных отклонений ok(t) случайных функций Xi(t) ii = 1, 2, 3, 4; k = I, II, III). Графики соответствующих мате матических ожиданий mi (t) также не представлены, так как при выбранных начальных условиях они не изменялись. Соответствие номеров рисунков выбору характеристик автомобиля и номеру фазовой координаты приведено в табл. 3. На этих рисунках класс дороги отмечен цифрой от 1 до 3.
0.025
0.02
0.015
0.01
0.005
0.5
1.5
Рис. 2
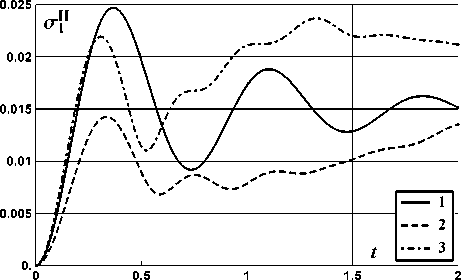
Рис. 3
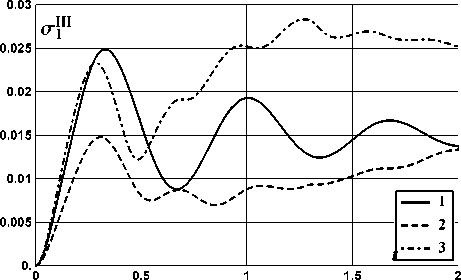
Рис. 4
Рис. 5
Рис. 6 Рис. 7
3. Заключение
Несложно увидеть, что поведение полученных для переменной скорости средних квадратичных отклонений существенно отличается от поведения этих же характеристик в случае постоянной скорости [15].
Рис. 8 Рис. 9
Рис. 10 Рис. 11
0.12
0.09
0.06
0.03
0.5
1.5
Рис. 12
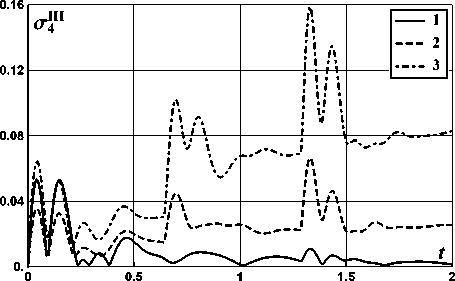
Рис. 13
Список литературы Расчет характеристик ускоренного движения автомобиля по дороге со случайным микропрофилем
- Guo L.-X., Zhang L.-P. Vehicle vibration analysis in changeable speeds solved by pseudoexcitation method // Mathematical Problems in Engineering. 2010. Vol. 2010, Article ID 802720. 14 p.
- McGetrick P.J., Kim G., Gonzalez A., OBrien E.J. Dynamic axle force and road profile identification using a moving vehicle // International Journal of Architecture, Engineering and Construction. 2013. Vol. 2, № 1. P. 1-16.
- Павлюк Ю.С., Сакулин В.Д. Аналитическая оценка случайных колебаний линейных систем в случае запаздывания колебаний // Динамика и прочность конструкций: тематический сб. науч. тр. Челябинск: ЧПИ, 1975. № 159. С. 62-67.
- Светлицкий В.А. Случайные колебания механических систем. М.: Машиностроение, 1991. 320 с.
- Di Paola М., Pirotta A. Vehicle dynamic response considering front-to-rear excitation delay // 8th ASCE Specialty Conf. on Probabilistic Mechanics and Structural Reliability. 2000. PMC2000-255. 6 p. URL: http://citeseerx.ist. psu.edu/viewdoe/download?doi=10.1.1.622.70 92&rep=repl&type=pdf (дата обращения: 14 декабря 2019).
