Разработка блока отбраковки трудноотделимой примеси из зерна в сепараторе, использующем техническое зрение

Автор: Ямпилов С.С., Нехуров Н.А., Балданов В.Б.
Журнал: Вестник Восточно-Сибирского государственного университета технологий и управления @vestnik-esstu
Рубрика: Технологии, машины и оборудование для агропромышленного комплекса (технические науки)
Статья в выпуске: 3 (98), 2025 года.
Бесплатный доступ
Засоренность трудноотделимой сорной примесью, в особенности семенами татарской гречихи (Fagopyrum tataricum), значительно ухудшает как посевные, так и технологические свойства зерна. Семена татарской гречихи по своим физическим параметрам близки к семенам пшеницы, что существенно затрудняет их удаление с использованием традиционных методов очистки, таких как решетные сепараторы, пневмосепарирующие каналы, триеры и другие сепараторы. Очистка трудноотделимых примесей возможна за счет современных технологий, использующих техническое зрение. В статье представлены результаты разработки и демонстрации функционирования аппаратнопрограммного комплекса, предназначенного для автоматической сепарации трудноотделимых сорных примесей, в частности семян татарской гречихи, из зернового материала.
Сепарация семян, татарская гречиха, пшеница, техническое зрение, качество семян
Короткий адрес: https://sciup.org/142245674
IDR: 142245674 | УДК: 631.362 | DOI: 10.53980/24131997_2025_3_51
Engineering of block for removing difficult-to-separate impurities from grain in separator with machine vision
Grain dockage with difficult-to-separate weeds, especially seeds of Tatar buckwheat (Fagopyrum tataricum), significantly impairs both the sowing and technological properties of grain. The seeds of Tatar buck-wheat are physically similar to wheat seeds, which makes it difficult to remove them using traditional cleaning methods such as sieve separators, pneumatic separation channels, triers and other separators. Purification of difficult-to-separate impurities is possible due to the use of modern technologies of machine vision. The article presents the results of engineering and demonstration of a hardware and software complex for automatic separation of difficult-to-separate weed impurities, in particular seeds of Tatar buckwheat.
Текст научной статьи Разработка блока отбраковки трудноотделимой примеси из зерна в сепараторе, использующем техническое зрение
В настоящее время семена пшеницы в Республике Бурятия засорены трудноотделимым сорняком – татарской гречихой. Проблема усугубляется высокой плодовитостью сорняка (до 1500 семян с одного растения) и многолетней всхожестью его семян. Засоренность посевов татарской гречихой приводит к прямым экономическим потерям: например, при плотности произрастания 30 растений сорняка на квадратный метр урожайность пшеницы может снижаться примерно на 22 % [1]. В литературе имеются сведения о разработке фотосепараторов для очистки и сортирования зерна [2-5]. Разработаны оптико-электронные технические средства для распознавания, сортирования и очистки зерна различных сельскохозяйственных культур, однако нет сведений об очистке зерна от трудноотделимой примеси (татарской гречихи) [6-15].
Поэтому разработка технического устройства, которое позволяет четко очистить семена зерна от трудноотделимой примеси, – актуальна.
Цель исследования - разработка блока детекции для сепаратора с использованием технического зрения по очистке семян пшеницы от трудноотделимой сорной примеси (татарской гречихи).
Аппаратно-программная архитектура комплекса: разработанный комплекс (рис. 1) реализован по классической схеме «ведущий - ведомый» (персональный компьютер – микроконтроллер), что обеспечивает его гибкость и масштабируемость. Такой подход позволяет оптимально распределить вычислительную нагрузку: ресурсоемкие задачи по анализу изображений и применению нейросетевых моделей эффективно выполняются на персональном компьютере, в то время как задачи детерминированного управления исполнительными механизмами в режиме реального времени точно возложены на специализированный микроконтроллер.

Рисунок 1 – Общий вид экспериментального стенда сепаратора
Подсистема отбраковки : аппаратная реализация и обоснование выбора компонентов. Подсистема отбраковки является ключевым звеном, предназначенным для формирования воздушного импульса, обеспечивающего точную эжекцию (выдувание) идентифицированного объекта (трудноотделимой примеси). Ее надежность и быстродействие определяют общую эффективность сепаратора.
Ключевые компоненты подсистемы: источник сжатого воздуха. Поршневой масляный компрессор FUBAG AIR MASTER KIT с ресивером объемом 24 л и рабочим давлением 8 бар. Этот выбор обусловлен необходимостью обеспечения стабильного и достаточного давления для формирования мощных воздушных импульсов.
Исполнительный клапан: электропневматический распределитель Airtac 3V110-06-NC (3/2, нормально-закрытый). Его высокая скорость срабатывания и способность генерировать сильный воздушный поток критически важны для уверенной и быстрой отбраковки.
Силовой ключ: твердотельное реле (SSR).
Управляющий контроллер: плата Arduino Leonardo на базе микроконтроллера ATmega32U4. Особого внимания заслуживает выбор связки «клапан 220 VAC – SSR – контроллер 5 VDC». Использование мощного промышленного клапана Airtac с катушкой на 220 В продиктовано его высоким быстродействием и способностью создавать мощный воздушный поток, необходимый для уверенной эжекции нежелательных примесей. Для безопасного и надежного управления таким высоковольтным исполнительным механизмом от низковольтного микроконтроллера применяется твердотельное реле. SSR обеспечивает полную гальваническую развязку между силовой и управляющей цепями, демонстрирует высокое быстродействие (время срабатывания <1 мс) и практически полное отсутствие механического износа. Эти характеристики являются критически важными для систем, требующих высокой частоты и безупречной надежности срабатываний, что напрямую влияет на производительность и долговечность сепаратора.
Программная часть комплекса состоит из двух ключевых модулей, обеспечивающих его слаженное и эффективное функционирование.
Протокол связи и инициализация: связь с персональным компьютером осуществляется по последовательному порту на скорости 9600 бод. Для верификации соединения и обеспечения надежного старта перед началом работы реализован механизм «рукопожатия» PINGPONG.
Исполнение команды эжекции: основная функция контроллера заключается в точном формировании управляющего импульса. Он непрерывно ожидает поступления от ПК рабочей команды в строгом формате: "ACTUATE,DELAY_MS,NOZZLE_ID". Получив команду, микроконтроллер производит ее синтаксический разбор, извлекая необходимую длительность импульса (delayMs) и идентификатор форсунки (nozzleId).
Алгоритм основного управляющего программного обеспечения (detector_5.py). Этот модуль является центральным, интегрируя функции захвата частиц зернового материала и обработки видеопотока, нейросетевой детекции и высокоуровневого управления системой отбраковки. Общая логика работы наглядно представлена на блок-схеме (рис. 2).
Программа реализует следующий пошаговый алгоритм:
Инициализация: при запуске происходит загрузка предварительно обученной нейросетевой модели YOLO, инициализация видеозахвата с выбранной USB-камеры и установка соединения с контроллером Arduino по протоколу PING-PONG.
Основной цикл обработки: программа входит в непрерывный цикл, где на каждой итерации выполняется захват нового кадра из видеопотока.
Нейросетевая детекция: захваченный кадр передается на вход модели YOLO. Модель возвращает массив обнаруженных объектов, каждый из которых содержит координаты ограничительной рамки (bounding box), класс объекта («пшеница» или «татарская гречиха») и степень уверенности (confidence).
Трекинг и принятие решения: для стабильного отслеживания объектов между кадрами и присвоения им уникальных ID используется алгоритм CentroidTracker. Когда центроид объекта, классифицированного как «татарская гречиха», пересекает заранее заданную в настройках виртуальную «линию отбраковки», система фиксирует событие и инициирует процедуру эжекции.
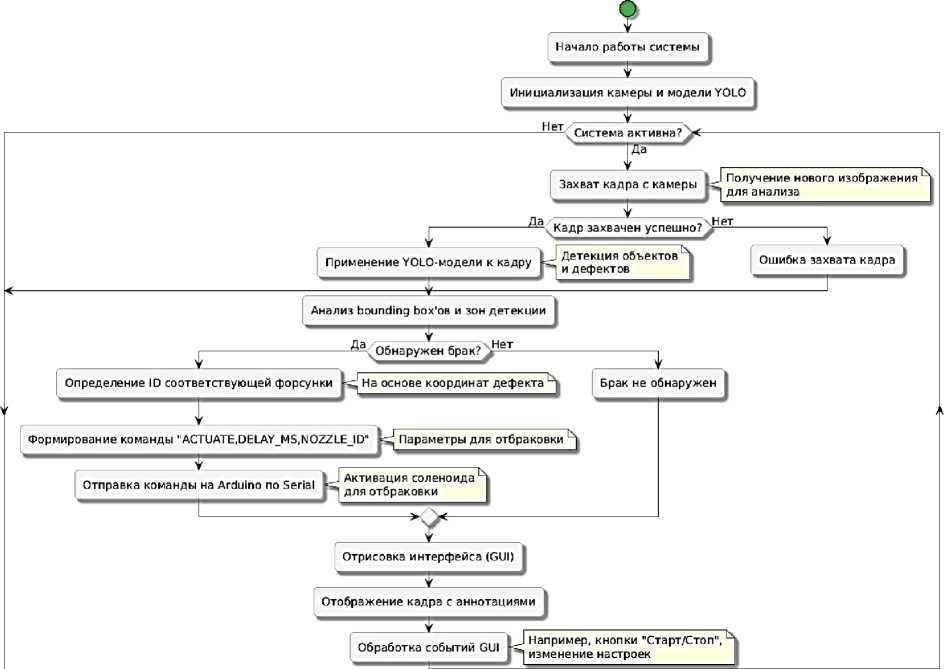
Рисунок 2 – Блок-схема алгоритма детекции брака и управления отбраковкой

Маппинг и формирование команды: для определения конкретного эжектора, который должен сработать, используется горизонтальная координата (X) центра обнаруженного объекта. Рабочая зона в кадре логически разделена на N вертикальных секторов, каждый из которых соответствует одной из форсунок. На основе X-координаты вычисляется nozzle_id целевого эжектора. После этого формируется строковая команда "ACTUATE,DELAY_MS,NOZZLE_ID", где DELAY_MS - это калибровочный параметр, задаваемый в настройках, определяющий длительность воздушного импульса.
Асинхронная отправка команды: для предотвращения блокировки основного цикла обработки видео и «зависания» интерфейса отправка команды на Arduino выполняется в отдельном вычислительном потоке (threading.Thread). Это позволяет программе немедленно перейти к анализу следующего кадра, пока микроконтроллер аппаратно отрабатывает команду эжек-ции, обеспечивая непрерывность процесса.
Визуализация: результаты детекции (рамки, классы, уверенность), линия отбраковки и зоны ответственности форсунок отрисовываются поверх исходного видеокадра, который выводится в окне интерфейса для визуального контроля оператором.
Результаты исследования и их обсуждения
В ходе лабораторных испытаний программный модуль продемонстрировал способность обрабатывать видеопоток со скоростью примерно 25 кадров в секунду, при этом задержка на обработку одного кадра составляла около 40 миллисекунд. Система стабильно идентифицировала и выделяла семена татарской гречихи, корректно формируя дискретные коор- динатные сигналы, которые в перспективе могут быть использованы для управления исполнительными механизмами сепарационного оборудования.

Рисунок 3 – Примеры работы алгоритма детекции на изображениях.
Зелеными рамками выделены семена пшеницы, красными – семена татарской гречихи.
Над каждой рамкой указан класс и вероятность детекции. Справа – информационная панель с ID и координатами центров обнаруженных семян татарской гречихи
Обсуждение и перспективы развития
Представленный аппаратно-программный комплекс является действующим прототипом, убедительно демонстрирующим жизнеспособность выбранной архитектуры. Выбранная архитектура «ПК + микроконтроллер» представляет собой удачный компромисс между производительностью и стоимостью. Она позволяет эффективно использовать всю мощь современных GPU для нейросетевой детекции, одновременно делегируя задачи точного временного контроля недорогому и надежному специализированному контроллеру.
Разработанный аппаратно-программный комплекс отличается от всех существующих тем, что для повышения производительности сепаратора используется переход от блокирующей функции delay() к неблокирующей системе управления на основе аппаратных таймеров и прерываний. Использование функции millis() для отслеживания времени позволит микроконтроллеру одновременно управлять состоянием нескольких эжекторов и непрерывно опрашивать последовательный порт. Это является обязательным условием для создания высокопроизводительной промышленной системы.
Оптимизация программного обеспечения: дальнейшая работа над ПО на ПК может включать оптимизацию конвейера обработки изображений (препроцессинг, инференс, постпроцессинг) для увеличения общей пропускной способности системы (кадров/с).
Механическое совершенствование: конструкция лотка для подачи материала, системы освещения и оптимальное расположение эжекторов также являются важными направлениями для исследований. Цель – достижение более равномерного потока частиц и минимизация окклюзий (перекрытий объектов), что напрямую влияет на точность и эффективность отбраковки.
Заключение
В рамках данной работы был разработан и всесторонне описан аппаратно-программный комплекс для автоматической сепарации зерна от трудноотделимой примеси. Предложенная архитектура, сочетающая высокопроизводительную нейросетевую детекцию (распознава- ние) на персональном компьютере и прецизионное управление исполнительными механизмами на микроконтроллере, убедительно доказала свою работоспособность в качестве прототипа.
