Разработка и исследование бионической модели нейронной сети для управления движением робототехнических систем

Автор: Бахшиев Александр Валерьевич, Гунделах Филипп Викторович
Журнал: Космические аппараты и технологии.
Рубрика: Робототехника и мехатроника
Статья в выпуске: 3 (13), 2015 года.
Бесплатный доступ
В работе рассматривается возможность реализации подхода к управлению робототехническими системами на основе данных об архитектуре биологических нейронных структур управления движением. Рассмотрен пример создания нейросетевого регулятора как упрощенной модели нейронной сети спинального уровня управления мышечным сокращением. Представлена структура иерархического регулятора, способного запоминать и воспроизводить состояния объекта управления.
Искусственный интеллект, нейронные сети, биоподобная модель нейрона, система управления
Короткий адрес: https://sciup.org/14117356
IDR: 14117356 | УДК: 004.896
Development and research of bionic neural network model for robotic systems motion control
This paper considers the feasibility of the approach to the robotic systems control based on the architecture of biological neural motion control structures. An example of creating a neural network controller as a simplified model of a neural network-level management of spinal muscular contraction is shown. The structure of the hierarchical control, capable to memorize and reproduce the state of the control object, is represented.
Текст научной статьи Разработка и исследование бионической модели нейронной сети для управления движением робототехнических систем
-
- необходимым условием применения традиционных методов оптимального и адаптивного управления является наличие большого объема априорной информации об объекте управления, например, данных математического моделирования. Благодаря способности нейронных сетей к самообучению для нейроконтроллеров такой объем информации не требуется. В связи с этим можно полагать, что нейроконтроллеры
ИССЛЕДОВАНИЯ пригодны для управления в условиях существенных неопределенностей;
-
- благодаря реализуемой в нейронной сети архитектуре параллельной обработки, повреждение отдельных элементов технических средств сети не может существенно влиять на работу сети в целом.
Большинство нейрорегуляторов, существующих на нынешний день, основаны на применении модели формального нейрона [2], однако такая модель имеет сильную фор- 32 мализацию и примитивизацию функций, что
На рис. 1 показано место нейронной сети позиционирования в системе управления манипулятором.
Общий вид структуры используемого регулятора [4], основанного на биоподобной импульсной модели нейрона [5; 6], представлен на рис. 2.
Структура управляющего элемента подробно описана в [4].
Задача согласованного управления этими звеньями была разбита на два этапа.
На первом этапе был разработан следующий уровень управления раздельно для каж-
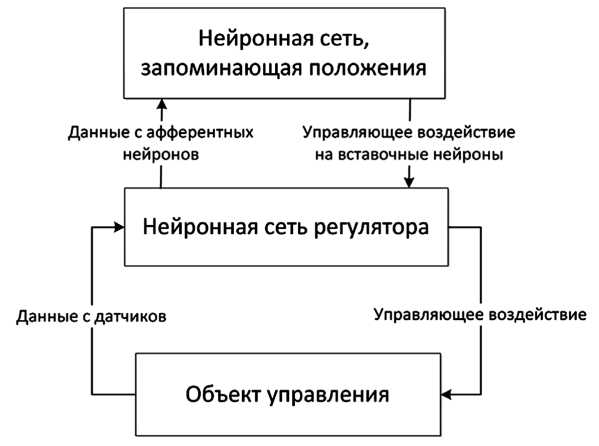
Рис. 1. Структурная схема системы управления с нейросетью позиционирования
делает её далекой от моделирования реальной работы нейронов. Помимо формальной модели нейрона разработано большое число моделей, описывающих нейрон с точки зрения химии протекающих процессов [3].
Постановка задачи
В работе решается задача согласованного управления несколькими подвижными элементами робототехнической системы с помощью нейросетевых регуляторов. В качестве объекта управления использована модель двухзвенного манипулятора. Каждый регулятор должен обеспечивать поддержание заданного положения звена в пространстве в своей системе координат. Согласованная работа регуляторов положения звена обеспечивается с помощью схожего по структуре регулятора, находящегося на более высоком уровне управления.
дого регулятора, обеспечивающего возможность запоминания набора желаемых положений звена в собственной системе координат звена. Входом такого уровня служат данные активности афферентных нейронов, активность которых описывает параметры движения объекта в пространстве. Нисходящим выходом обратно на НС регулятора является активность, подаваемая на вставочные нейроны, активность на которых определяет изменение активности мотонейронов и таким образом изменяет характер движения объекта.
Основная функция такой обучаемой нейросетевой модели позиционирования отдельного звена манипулятора (рис. 3) заключается в том, чтобы зафиксировать в структуре связей сети возможные варианты положения объекта в пространстве и получить возможность воспроизводить эти состояния по сигналу с высшего уровня.
Разработка и исследование бионической модели нейронной сети для управления движением
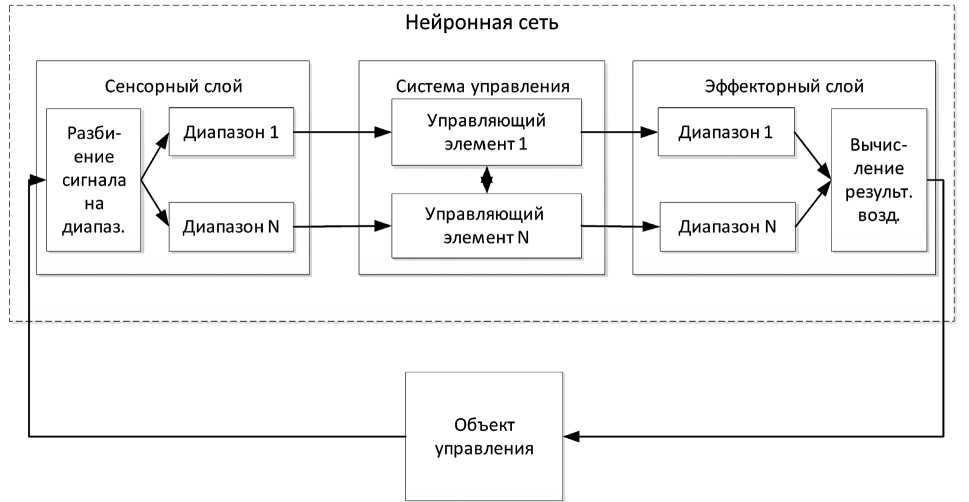
Рис. 2. Функциональная схема исследуемой системы
В такой сети афферентные нейроны системы управления связаны с соответствующими нейронами слоя IA, представляющими собой копии афферентных нейронов. Слой IA отображает активность афферентных нейронов. Следующий слой PI отображает положения манипулятора, а запоминание этих положений происходит установлением возбуждающих связей между активными нейронами слоя IA и соответствующими нейронами слоя PI, а также установлением тормозных связей между активными нейронами слоя IA и ранее обученными нейронами слоя PI. При этом каждому нейрону в слое PI ставится в соответствие отдельное положение объекта.
Одновременно с созданием связей между слоями IA и PI осуществляется создание соответствующих связей между слоями PC и CP, которые обеспечивают обратное преобразование заданной активности нейронов PC, каждый из которых определяет желаемое положение объекта управления, аналогично PI в выходную активность CP, которая поступает на вставочные нейроны нейронной сети регулятора.
Таким образом, выходы нейронов PI являются выходами такой нейронной сети,
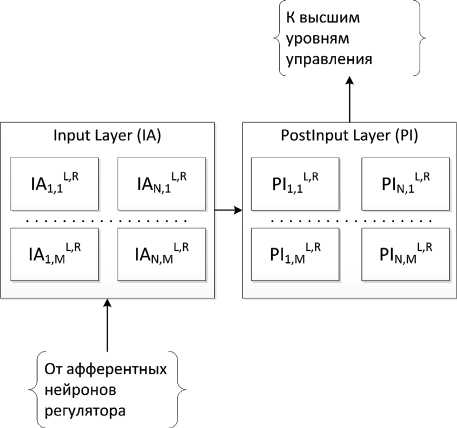
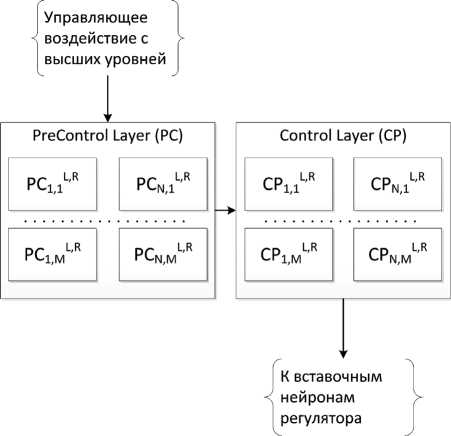
Рис. 3. Схема нейронной сети запоминания положений (позиционирования)
ИССЛЕДОВАНИЯ поступающими на следующие уровни управления, а входы нейронов PC являются ее входами с этих уровней. Разница между активностью нейронов PI и PC определяет разницу между заданным и текущим положениями объекта управления.
На втором этапе реализации механизма согласованного управления была разработана нейронная сеть, входом которой является информация о текущем положении каждого звена, определяемая активностью нейронов
34 PI нейронных сетей позиционирования от- лее высокого уровня управления, а на входы слоя PC такой сети принимают сигнал с выходов слоя CP более высокого уровня управления.
Экспериментальное исследование
С помощью библиотеки Neuro Modeler SDK [7] было проведено экспериментальное исследование системы управления звеном манипулятора с нейросетью позиционирования, а также исследование системы управления
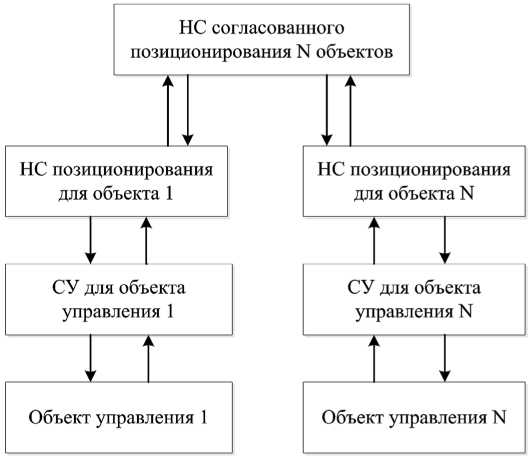
Рис. 4. Схема использования нейронной сети позиционирования для управления несколькими объектами
дельных подвижных элементов, а выходные сигналы поступали на нейроны PC соответствующих НС позиционирования.
Такая нейронная сеть согласованного управления имеет структуру, аналогичную представленной на рис. 3. Таким образом, например, при управлении несколькими звеньями манипулятора она сможет запоминать взаимное расположение этих звеньев. Схема для такого случая приведена на рис. 4.
В случае применения нейросети позиционирования для нескольких объектов управления структура нейронной сети останется прежней, только на вход слоя IA будут поступать сигналы с выходов слоёв PI более низких уровней управления, а сигналы с выходов слоя CP такой сети будут поступать на входы слоёв PC более низких слоёв управления. Сигналы с выходов слоя PI нейросети согласованного позиционирования идут на входы слоя IA бо- несколькими звеньями с нейросетью согласованного позиционирования (рис. 4).
В ходе исследований нейросети позиционирования были обучены нескольким разным положениям звеньев манипулятора. После обучения путем стимуляции слоя PC нейронные сети позиционирования успешно приводили систему в одно из запомненных состояний, соответствующее паттерну стимуляции.
Нейросеть согласованного позиционирования была обучена нескольким состояниям с разным взаимным расположением звеньев манипулятора. После обучения нейросеть согласованного позиционирования также успешно воспроизводила запомненные состояния в зависимости от паттерна стимуляции.
Таким образом, исследования показали способность нейронной сети позиционирования запоминать и воспроизводить положе-
Разработка и исследование бионической модели нейронной сети для управления движением ния исполнительной системы робота. Также исследования подтвердили возможность использования аналогичной схемы для реализации более высокого уровня управления в задаче управления несколькими звеньями.
В дальнейшем планируется решать задачи комплексного управления несколькими 5. объектами для решения задач движения по траектории.
В перспективе расширение такого рода структуры может представлять некоторое подобие низших систем управления движением в теле человека. Однако, чтобы стать применимой, подобная система управления должна иметь сенсоры, позволяющие замкнуть контуры управления, 6. а также механизм самостоятельного обучения.
Список литературы Разработка и исследование бионической модели нейронной сети для управления движением робототехнических систем
- Сигеру О. Нейроуправление и его приложения/пер. с англ. Н. В. Батина. М: ИПРЖР, 2000.
- McCulloch W. S. Pitts W.A logical calculus of the ideas immanent in nervous activity//Bulletin of Mathematical Biophysics. 1943. Vol. 5. P. 115-133.
- Ротштейн А. П. Интеллектуальные технологии идентификации: нечеткая логика, генетические алгоритмы, нейронные сети. Винница: УНИВЕРСУМ-Винница, 1999. 320 с.
- Бахшиев А. В. Применение моделей нейронных структур управления мышечным сокращением в задачах управления манипулятором//Нейроинформатика, её приложения и анализ данных: материалы XIX Всероссийского семинара, 1-3 октября 2011 г./под ред. А. Н. Горбаня, Е. М. Миркеса; отв. за вып. Г. М. Садовская. Красноярск: Сибирский федеральный университет, 2011. 11-16 с.
- Бахшиев А. В. Модель нейрона со структурной адаптацией дендритного аппарата для моделирования естественных нейронных сетей управления движением//Нейроинформатика, ее приложения и анализ данных: материалы XVIII Всероссийского семинара, 27-29 сентября 2013 г./под ред. А. Н. Горбаня, Е. М. Миркеса; ИВМ СО РАН; отв. за вып. Г. М. Садовская. Красноярск, 2013. 36-43 c.
- Бахшиев А. В., Романов С. П. Нейрон с произвольной структурой дендрита, математические модели биологических прототипов//Нейрокомпьютеры: разработка, применение. 2009. № 3. С. 71-80.
- Бахшиев А. В. Библиотека средств разработки моделей нейронных сетей со сложной и динамически меняющейся архитектурой -NMSDK//Нейроинформатика, ее приложения и анализ данных: материалы XVIII Всероссийского семинара, 8-10 октября 2010 г./под ред. А. Н. Горбаня, Е. М. Миркеса; ИВМ СО РАН; отв. за вып. Г. М. Садовская. Красноярск, 2010. С. 26-30.
