Разработка малогабаритного подводного робота для исследования пресных вод

Автор: Прохоров А.Д., Ащеулова А.В.
Журнал: Международный журнал гуманитарных и естественных наук @intjournal
Рубрика: Технические науки
Статья в выпуске: 5-4 (92), 2024 года.
Бесплатный доступ
Мировой рынок подводной робототехники вырастет до $11,1 млрд. в 2032 году, что объясняется растущим спросом на исследования и освоение водных ресурсов Земли. В статье проведен анализ малогабаритные подводные роботов класса ТНПА, рассмотрена возможность создания недорого малогабаритного подводного робота. Результатами исследования являются: разработка конструкторского решения, расчёт его себестоимости малогабаритного подводного робота.
Робототехника, подводная робототехника, экология
Короткий адрес: https://sciup.org/170205272
IDR: 170205272 | DOI: 10.24412/2500-1000-2024-5-4-49-52
Development of a small-sized underwater robot for freshwater exploration
The global market for underwater robotics will grow to $11.1 billion in 2032, due to the growing demand for research and development of the Earth's water resources. The article analyzes small-sized underwater robots of the TNPA class, considers the possibility of creating an inexpensive small-sized underwater robot. The results of the research are: development of a design solution, calculation of its cost of a small-sized underwater robot.
Текст научной статьи Разработка малогабаритного подводного робота для исследования пресных вод
За последние 10 лет интерес к подводной робототехнике в нашей стране значительно вырос. Это соответствует общемировым тенденциям в данной области. И обусловлено в первую очередь интересом заказчика к данным решениям, поскольку они позволяют сократить издержки, связанные с участием человека в сложных и опасных операциях. Применение малогабаритных подводных роботов позволит эффективно исследовать и мониторить водные ресурсы «для проверки всех ис-
точников загрязнений водного объекта» [2]. Разработка малогабаритного, недорогого подводного робота для исследований пресных вод – цель нашего исследования для выполнения поисковых, инспекционных и исследовательские работ в «сложные условия эксплуатации» [5]. Внедрение важно для решения научных и прикладных задач, т. к. не требуют «специальных разрешений» [1]. Нами выделены ключевые достоинства подводных малогабаритных роботов (рис. 1).
Возможность перемещения во всех плоскостях, оставаясь направленным в одну сторону;
Модульность и лёгкая заменяемость компонентов
Векторное управление
Глубина погружения
Рис. 1. Ключевые достоинства подводных роботов
Ключевые достоинства определили класс ТНПА роботов для дальнейшего исследования – аппараты, оснащенные специальным оборудованием, погружаемым в воду и управляемые с поверхности пилотом или группой операторов. В ходе исследования проанализированы подводные
роботы класса ТНПА, данные представлены в таблице1. Изучив опыт учёных и конструкторов, было принято решение уделить внимание снижению себестоимости в ходе разработки малогабаритного подводного робота для исследования пресных вод.
Таблица 1. Современные ТНПА (сравнительные технические характеристики) [3]
|
Технико-экономические параметры продукта |
TurtleROV2 |
Марлин-350 |
Seaeye Falcon |
Seabotix vLBV300 |
ROV- Builder 600 |
ГНОМ |
|
Цена, млн. руб. |
5,0 |
7,5 |
5,8 |
4,0 |
2,1 |
2,5 |
|
Собственная масса, кг. |
35 |
60 |
60 |
18 |
20 |
25 |
|
Габариты, см. |
65 х 60 х 35 |
98 х 59 х 40 |
100 х 60 х 50 |
63 х 39 х 39 |
65 х 35 х 35 |
52 х 44 х 35 |
|
Длина кабеля, м. |
до 600 |
до 450 |
до 450 |
до 250 |
до 300 |
до 400 |
|
Скорость хода, узлов |
4, лагом - 2 |
2, лагом - 1 |
3, лагом - 1 |
3, лагом - 1,5 |
2 |
3, лагом -0,5 |
|
Количество видеокамер, передняя / задняя |
1/1 |
1/2 |
1 |
1 |
1/1 |
1 |
|
Количество движителей, горизонт / вертикаль/ бок |
4 /2 |
4/2 |
4/2 |
4/2 |
4/2/1 |
2/2/2 |
|
Встроенные датчики и навигационная система |
9 DOF ИНС + датчик глубины |
крен, дифферент, курс, глубина |
компас + датчик глубины + ДУС |
крен, дифферент, курс, глубина |
датчик глубины |
компас + датчик глуби ны |
На основе данного анализа выделены аспекты для постановки технического задания на разработку проектируемого робота ПРИВ-М (табл. 2).
Таблица 2. Характеристики проектируемого малогабаритного подводного робота
|
Технические параметры |
ПРИВ-М |
|
Собственная масса, кг. |
16 |
|
Габариты, см. |
50×36×27 |
|
Длина кабеля, м. |
250 |
|
Скорость хода, узлов |
2 |
|
Количество видеокамер Передняя/задняя |
1/1 |
|
Количество движителей горизонт/вертикаль/бок |
4/2 |
|
Встроенные датчики и навигационная система |
Датчик температуры, барометр, датчик солености. Компас, сонар, GPS |
Разработанная функциональная схема проектируемого робота должна соответствовать решению, представленному на рисунке 2.
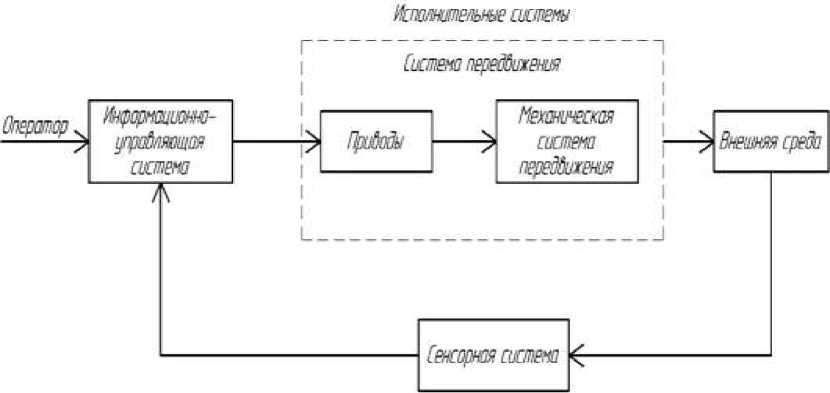
Рис. 2. Схема робота функциональная
Полипропилен – материал для корпуса робота, отличается высокой прочностью, устойчивостью к химическим воздействи-
ям и высоким температурам. Этот материал также экологически безопасен и может быть подвергнут переработке для повтор-
ного использования. Различные датчики позволяют собирать данные о температуре воды, примесях, скорости течения и дру-
гих параметрах [4]. Эскиз проектируемого робота представлен рисунке 3.
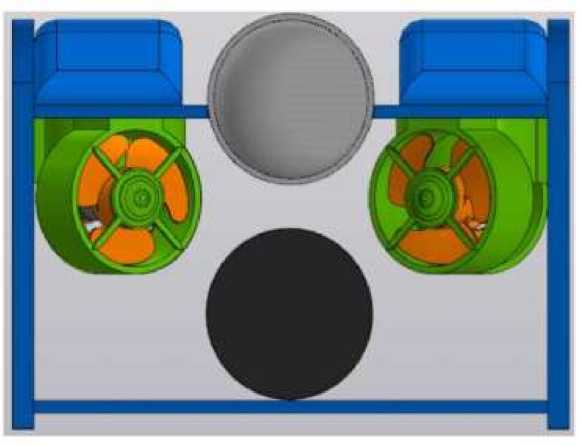
Рис. 3. Рисунок робота (вид спереди)
Конструкция спроектирована с учётом центра масс для обеспечения стабильности робота при перемещении, добавлены поплавковые элементы, дополнен напористым пенопластом, при необходимости, для корректировки плавучести робота возможно добавление балласта.
Следующим этапом исследования – подбор компонентов, которые будут использоваться в создании робота, согласно утвержденным характеристикам. Перечень комплектующих и сведения затрат на изготовление малогабаритного робота представлены в таблице 3.
Таблица 3. Перечень комплектующих и сведения о затратах на изготовление
|
Наименование |
Шт./м |
Рублей |
|
Мотор F2838 350KV |
6 |
15000 |
|
Распределитель видеосигнала SC&T VD102 (VE02) |
1 |
11000 |
|
Raspberry Pi 5 4gb |
1 |
12600 |
|
Задняя видеокамера RPi Camera (B) |
1 |
1930 |
|
Передняя видеокамера Raspberry Pi Camera Module |
1 |
3000 |
|
Аккумуляторная батарея 18650 |
1 |
840 |
|
B30 датчик глубины MS5837 |
1 |
4000 |
|
Водонепроницаемый датчик температуры DS1820 |
1 |
230 |
|
Сонар HC-SR04 |
1 |
220 |
|
Гироскоп MPU6050 |
1 |
240 |
|
Кабель управления, м |
250 |
84117 |
|
Полипропилен, лист |
4 |
4800 |
|
Оценочная стоимость изготовления |
150 000 |
|
|
ИТОГО |
287977 |
Список литературы Разработка малогабаритного подводного робота для исследования пресных вод
- Данцевич, И.М. Разработка малогабаритного телеуправляемого необитаемого подводного аппарата гибридной компоновки / И.М. Данцевич // Морские интеллектуальные технологии. - 2022. - № 3-1(57). - С. 147-152. DOI: 10.37220/MIT.2022.57.3.019 EDN: VZIRJE
- Князев, С.И. Управляемое движение малогабаритного подводного робототехнического комплекса (МБПК) / С.И. Князев, А.С. Яцун, С.Ф. Яцун // Балтийский морской форум: материалы VII Международного Балтийского морского форума: в 6 т., Калининград, 07-12 октября 2019 года. Том 2. - Калининград: Калининградский государственный технический университет, 2019. - С. 40-45. EDN: ZQXACR
- Компании ООО "ЭЛМИКС": сайт Санкт-Петербург. - [Электронный ресурс]. - Режим доступа: https://turtlerov.com/indexru.html#descript (дата обращения 05.05.24).
- Томских, А.А. Особенности реализации систем управления исследовательскими подводными беспилотными модулями / А.А. Томских, Д.О. Савельев, С.П. Черный // Электропривод на транспорте и в промышленности: материалы III Всероссийской научно-практической конференции: посвящается 60-летию кафедры "Электротехника, электроника и электромеханика", Хабаровск, 19-20 октября 2023 года. - Хабаровск: Дальневосточный государственный университет путей сообщения, 2023. - С. 90-93. EDN: DRFKGO
- Шпекторов, А.Г. Технология разработки систем управления малыми подводными аппаратами / А.Г. Шпекторов, В.Т. Фам // Транспорт России: проблемы и перспективы - 2018: Материалы международной-научно-практической конференции, Санкт-Петербург, 13-14 ноября 2018 года. Том 1. - Санкт-Петербург: Санкт-Петербургский университет Государственной противопожарной службы Министерства Российской Федерации по делам гражданской обороны, чрезвычайным ситуациям и ликвидации последствий стихийных бедствий, 2018. - С. 285-289. EDN: DEMLAI
