Роль IoT в развитии концепции «Умный город»

Автор: Кочарян Ю.Г., Кобулян Г.С.
Журнал: Международный журнал гуманитарных и естественных наук @intjournal
Рубрика: Технические науки
Статья в выпуске: 1-3 (100), 2025 года.
Бесплатный доступ
Статья посвящена исследованию роли Интернета вещей (IoT) в процессе цифровой трансформации городской инфраструктуры и реализации концепции умного города. IoT выступает ключевым инструментом, объединяющим физические объекты инфраструктуры с цифровыми технологиями для повышения эффективности управления городскими системами, улучшения качества жизни граждан и снижения экологического воздействия. Рассматриваются примеры применения IoT в сферах транспорта, коммунальных услуг, экологического мониторинга и общественной безопасности. Особое внимание уделено анализу преимуществ, таких как автоматизация процессов и интеграция данных, а также вызовам, включая вопросы безопасности и масштабируемости. Обсуждаются перспективы использования IoT для устойчивого развития городов.
Информационные технологии, интернет вещей, умный город, цифровая трансформация, городская инфраструктура
Короткий адрес: https://sciup.org/170208960
IDR: 170208960 | DOI: 10.24412/2500-1000-2025-1-3-170-174
The role of IoT in the development of the smart city concept
The article explores the role of the Internet of Things (IoT) in the digital transformation of urban infrastructure and the implementation of the smart city concept. IoT serves as a key tool that integrates physical infrastructure objects with digital technologies to enhance the efficiency of urban systems, improve the quality of life for citizens, and reduce environmental impact. Examples of IoT applications in transportation, utilities, environmental monitoring, and public safety are examined. Special attention is given to analyzing benefits such as process automation and data integration, as well as challenges, including security and scalability issues. The article also discusses the prospects of using IoT for sustainable urban development.
Текст научной статьи Роль IoT в развитии концепции «Умный город»
Проведение моделирования движения летательных аппаратов является одной из важнейших частей проектирования любого изделия. На этом этапе удаётся избежать многих проблем, которые могли бы возникнуть при натурных испытаниях без предварительного анализа.
При проведении моделирования удаётся найти решение многих задач. Одной из таких задач является определение коэффициентов регулятора системы управления, который обеспечивает необходимое качество переходных процессов движения, а также необходимую точность регулирования.
Рассмотрим управление пространственным движением летательного аппарата, описание модели которого представлено в перегрузках в траекторной системе координат [3, с. 49-50].
Под перегрузкой понимают отношение результирующих сил, действующих на летательный аппарат (за исключением гравитационных и инерционных), к произведению массы летательного аппарата на ускорение свободного падения [5, c. 51].
При условии отсутствия ветра, угол пути совпадает со скоростным углом рысканья (Ф = ip), а угол наклона траектории совпадает со скоростным углом тангажа (0 = 19) [7, с. 17]. Тогда движение летательного аппарата описывается следующей системой в пространстве состояний:
*1 = L Х2= Н
*з=?
* 4
* 1 = * 4 = V x
* 2 = * 5 = V
* 3 = * 6 = V
*4 = V cos 1 cosip
* 5 = V sin I
* 6 = —V cosl sinp
_ 3 vx4
( ПХ--'г
\ x 7
* 5
Пу
* 2 + * 2
)
. g* 5
*5 = ~nx +
g^* 4 + *,
3* 6
-F=== П
Jxl+x6
• g (
* 6 = ^* 6 (n c -J
* 5
V
-g
, „ „ n.
*4 + *6 '
0+y
g* 4
===== nz
* 2 + * 6
где x1, x2, x3, x4, x5, x6, x1, x2, x3, x4, x5, x6 — переменные состояния и их первые производные;
VX,Vy,Vz — составляющие вектора линейной скорости летательного аппарата, м/с.
пх, пу, nz —составляющие вектора перегрузок по осям управления;
д — ускорение свободного падения, м/с2.
-
V = ^V X + Vy+Vz2 — величина линейной скорости летательного аппарата, м/с.
L — расстояние в продольном канале, м.
Н — расстояние в вертикальном канале, м.
Z — расстояние в боковом канале, м.
Средствами MATLAB Simulink составим модель движения летательного аппарата. На рисунках 1 и 2 представлены реализации модели системы управления по перегрузкам и модели траекторного движения летательного аппарата, описываемая уравнениями (1).
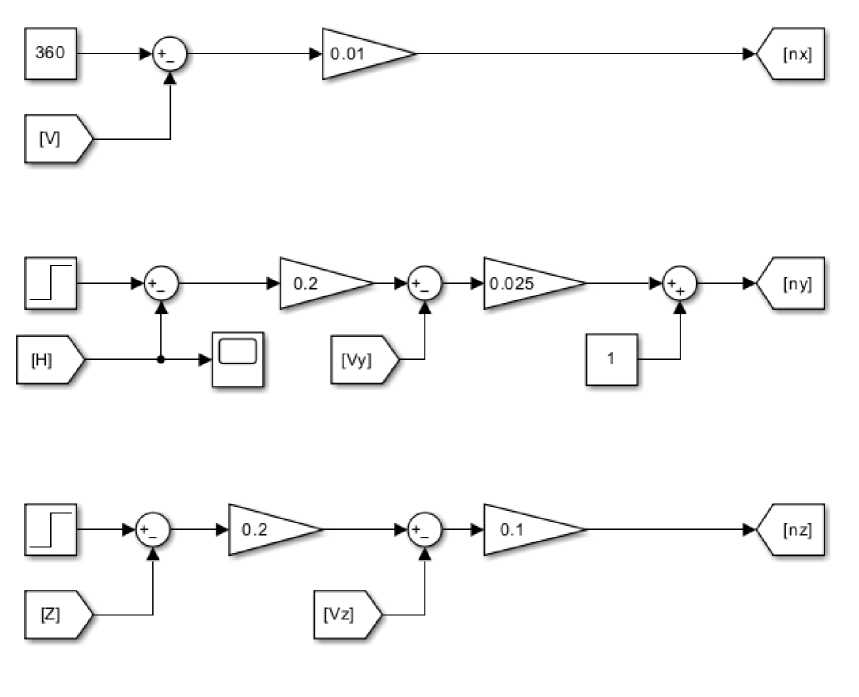
Рис. 1. Система управления по перегрузкам
В качестве входных воздействий на систему управления подаются ступенчатые изменения, описывающие необходимый маневр по оси управления. В обратные связи идут сигналы текущей высоты полета, текущей скорости полета и текущего бокового положения летательного аппарата с модели объекта управления.
С учётом изолированности каналов управления по осям траекторной системы координат [2, с. 36-38], получим искомые координаты изменения центра масс аппарата путем численного интегрирования уравнений движения летательного аппарата.
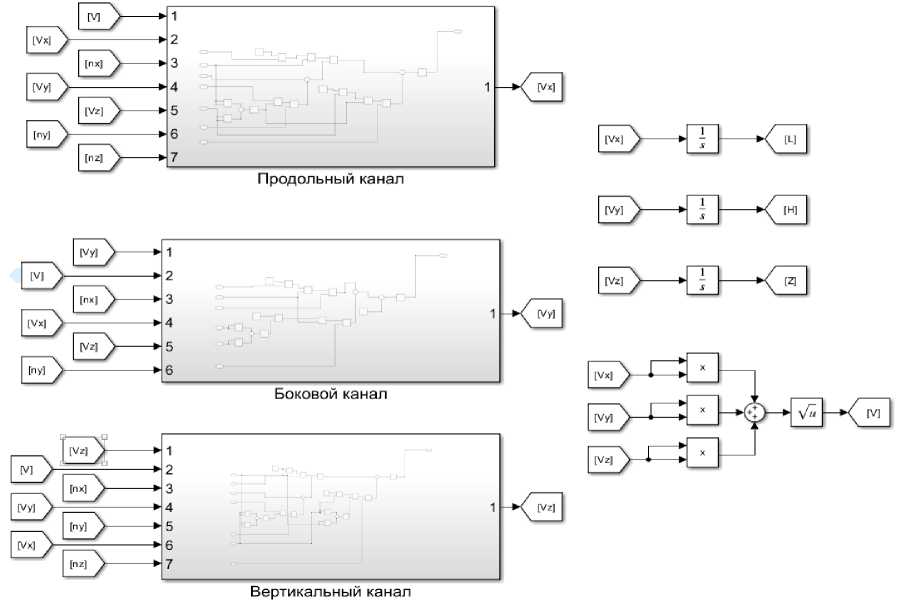
Рис. 2. Модель объекта управления
Выберем следующие коэффициенты регулятора [1, с. 144] в каналах управления движением:
-
- Продольный канал: К п = 0.01
-
- Вертикальный канал: Кп = 0.2 К д =
0.025
-
- Боковой канал: К п = 0.2 Кд = 0.1
Проведём моделирование движения летательного аппарата с выбранными коэффициентами. На рисунках 3 и 4 представлены результаты изменения координат центра масс летательного аппарата при ступенчатом входном воздействии, а также изменения перегрузок при совершении маневра. На первом графике представлено изменение координаты в продольном канале, на втором - координата канала высоты, на третьем - координата бокового канала.
Согласно полётному заданию необходимо совершить маневр увеличения высоты полета на 200 метров, а также совершить боковой маневр на 50 метров.
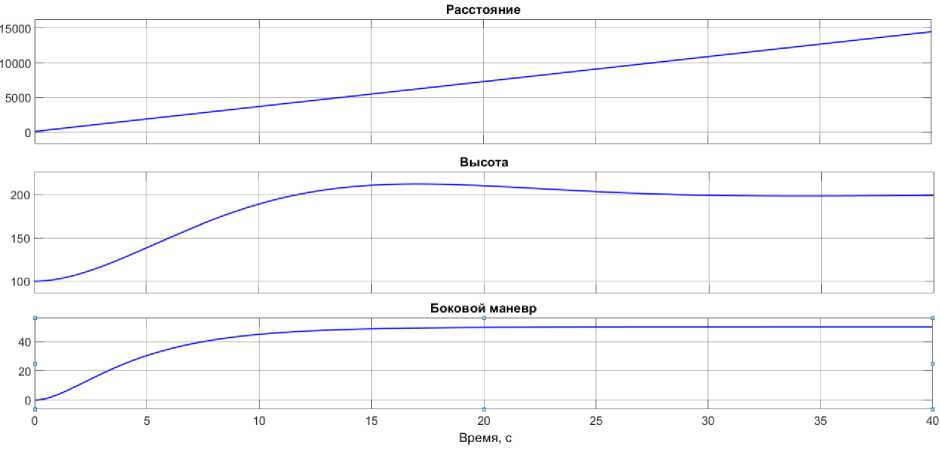
Рис. 3. Координаты по каналам управления
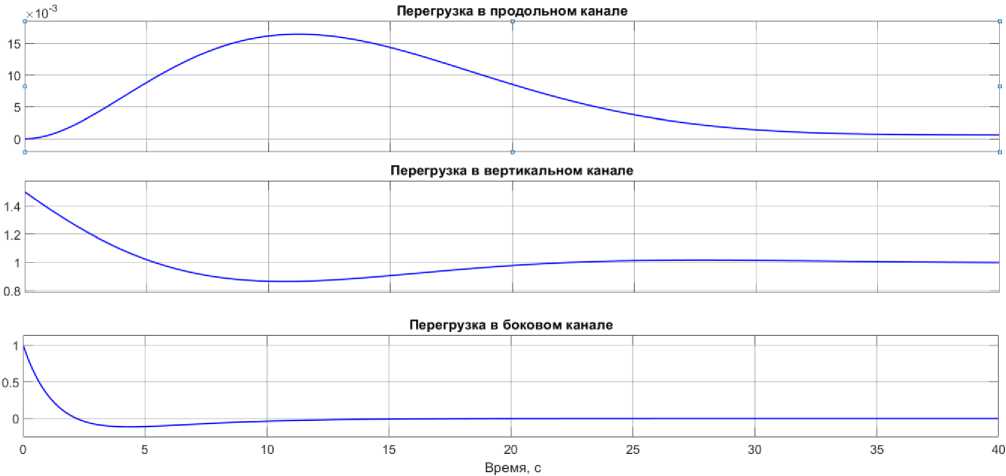
Рис. 4. Перегрузки по каналам управления
По результатам моделирования можем сделать следующие выводы:
-
- Система управления отрабатывает входные воздействия согласно алгоритму;
-
- Увеличение высоты полета реализуется с небольшим перерегулированием (порядка 6%);
-
- Боковой маневр совершается без перерегулирования; процесс имеет чисто апериодический характер [4, с. 47];
-
- Перегрузки в каналах управления удовлетворяют требованиям безопасности пилотов и
- пассажиров; не превышают отклонения более чем на 1.5 перегрузки [6, с. 49];
-
- Перегрузка в боковом канале в установившемся режиме принимает значение 0.
Ниже представлена пространственная картина совершенного маневра объекта управления. Следует отметить, что, при совершении бокового маневра, объект управления продолжает своё движение, что подтверждает изменение координаты в продольном канале. За время совершения маневра (40 секунд) координата в продольном канале увеличилась на 15000 метров.
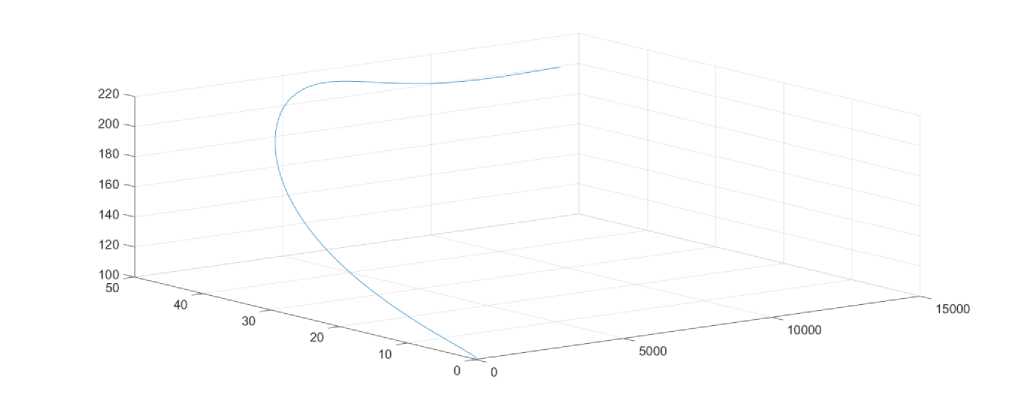
Рис. 5. Пространственное движение летательного аппарата
В заключение стоит отметить, что в данной статье была рассмотрена модель летательного аппарата без учёта внешних воздействий, например, ветра. Также было принято упрощение изолированности каналов управления друг от друга. Для дальнейшей реализации системы траекторного управления по перегрузкам необходимо доказать работоспособность системы управления упрощённой модели.
Таким образом, синтезированная система управления обеспечивает совершение необходимых маневров летательного аппарата таким образом, чтобы соблюдались требования к безопасности пассажиров и пилотов.
Список литературы Роль IoT в развитии концепции «Умный город»
- Грингард С. Интернет вещей: Будущее уже здесь // С. Грингард; перевод М. Трощенко. - Москва: Альпина Паблишер, 2016. - 188 с.
- Гулжанова Д., Халмырадов С., Бабагулыев О. Интернет вещей: умные города и будущее связанной технологии // Научный журнал «In SITU». - 2023. - №7. - С. 9-10.
- Кукушкин В. IoT в ЖКХ: как умные устройства меняют подход к управлению ресурсами // Евразийский научный журнал. - 2024. - №7. - С. 38-40.
- Акулинин Ф.В. Модели монетизации ИТ-проектов: виды, преимущества и недостатки / Ф.В. Акулинин, Д.В. Адамов // Инновационное развитие экономики. - 2020. - № 1(55). - С. 7-12. - EDN PMRGIQ.
- Микитка Е.А., Данилов О.Ф. В. Роль технологий интернета вещей в создании устойчивой инфраструктуры умного города // Сборник статей Международной научно-практической конференции. - 2024. - С. 23-26.
