S-движение планет по эллиптическим орбитам

Автор: Ивановростовцев А.Г., Колотило Л.Г.
Журнал: Общество. Среда. Развитие (Terra Humana) @terra-humana
Рубрика: Научный поиск
Статья в выпуске: 4 (73), 2024 года.
Бесплатный доступ
Используется модель S-образного движения со знакопеременными ускорениями для регистрации и анализа орбитальных колебаний планет. S-движение выступает в качестве общей закономерности, признанной как гуманитарными, так и прикладными науками. Траектории S-движения управляют системами и объектами от социальных институтов и политических систем до персональных роботов и беспилотных автомобилей. Применяется линейная развертка эллипса для временного анализа перемещения, скорости и ускорения движения по орбите. Показывается, как орбитальное перемещение в виде сигмоиды содержит две составляющие: линейную и колебательную. Представляется эвристическая модель маятника на тележке, описывающая физическую природу и характер колебаний планеты на орбите. Доказывается, что орбитальные колебания возбуждаются знакопеременными ускорениями при движении планет. Предлагается использовать полученные результаты для управления планетарными рисками и для анализа орбитальных движений спутников и звезд.
Знакопеременные ускорения, орбитальные колебания, поступательно--колебательное движение, d-self модель, s-движение
Короткий адрес: https://sciup.org/140308637
IDR: 140308637 | УДК: 523.4-1 | DOI: 10.53115/19975996_2024_04_097_104
Текст научной статьи S-движение планет по эллиптическим орбитам
Колебания орбитальных движений?
Орбитальные движения планет рассчитываются на основе кеплеровской модели [2] и законов небесной механики Ньютона [4], которые уточняются современными поправками на несферичность планеты, влияние спутников и Солнца, воздействие солнечного ветра, солнечного излучения, остаточной атмосферы [13] и других факторов. При появлении новых эмпирических данных эта модель дополняется более громоздким математическим аппаратом [14].
В своей базовой модели Кеплер использовал данные, опирающиеся на известные к тому времени физические законы. Возможно, из-за этого, некоторые важные закономерности орбитального движения оказались не учтены. Кеплером подробно не исследовались колебания параметров движущейся планеты, несмотря на факт изменения скорости между максимумом в перигелии и минимумом в афелии. В современных исследованиях появились методы, которые позволяют учесть характеристики колебаний нерав- номерного движения планет с переменной скоростью [1; 6].
В предлагаемой работе решается задача моделирования орбитального движения планеты путем развертки эллиптической траектории в прямолинейную. Данная процедура позволяет напрямую выявить и проанализировать колебательные параметры орбитального движения, используя аппарат теории колебаний [1].
Оказалось, что при развёртке во времени в декартовых координатах эллиптическая орбита представляет собой S-образное движение (далее – S-движение), управляемое знакопеременными ускорениями, которые периодически (пошагово или дискретно) ускоряют и замедляют непрерывный путь планеты.
Природа орбитальных знакопеременных ускорений может быть связана с механизмом «внутренних» маятников, которые в скрытой (неявной) форме раскачивают планету и «включаются» в общее орбитальное колебательное движение планеты на орбите.
Общество
Линейная развертка эллиптической орбиты
В модели Кеплера [2] анализ движения по эллиптическим орбитам проводится в полярных координатах. Эта система не позволяет напрямую определять вре- менные зависимости параметров движения, которые требуются для исследования колебаний. Например, для анализа периодичности орбитального движения, 2-й закон Кеплера (закон площадей) [2] необходимо переписать в виде временной зависимости положения планеты на орбите. С этой целью проводится временной анализ угловой координаты радиус-вектора с последующим определением его длины (модуля), представляющим пространственную координату положения на орбите.
Для упрощения анализа при построении временного графика орбитального положения планеты можно использовать декартовы координаты. В этом случае орбитальное движение сводится к сумме движений по дугам эллипса, которые представляют непрерывную траекторию. Линейную развертку, полученную таким путем, можно использовать для анализа колебаний параметров исходного орбитального движения: длины пути, скорости и ускорения.
Общество. Среда. Развитие № 4’2024
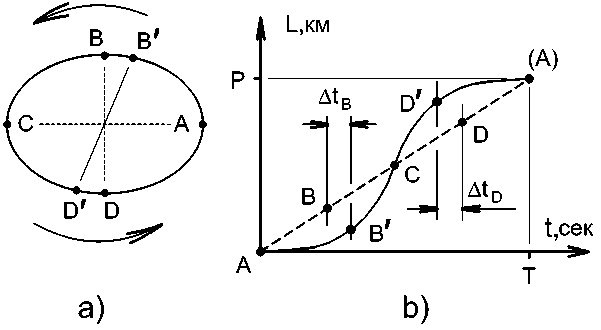
Рис. 1. Модели орбитального движения: a) эллипс в полярных координатах по Кеплеру; b) линейная развертка эллипса в декартовых координатах (L, t), где Р – периметр орбиты; Т – период обращения. Путь A-B-C-D-(A) соответствует равномерному движению с постоянной скоростью. Путь A-B′-C-D′-(A) соответствует неравномерному движению с переменной скоростью. В случае (а) пространственные траектории равномерного и неравномерного путей совпадают. В случае (b) – траектории разделяются на: пунктирная прямая линия – равномерное движение; сплошная линия S-образной формы – неравномерное движение.
Переход между равномерным и неравномерным движением отмечен смещением точек В → В′ и D → D′ (в случаях a и b), и временными интервалами ∆tВ и ∆tD (в случае b)
На рис. 1 представлены две орбитальные модели, на которых отражено движение с постоянной и переменной скоростью.
Из графиков на рис. 1 следует, что линейная развертка обладает рядом преимуществ по сравнению с полярной моделью эллипса. В полярных координатах не разделяются пространственные траектории равномерного и неравномерного движения. Временной анализ также проводить сложно, так как «равномерные» точки накладываются поверх «неравномерных». При линейной развертке (рис. 1, b) оба типа движения разделены как во времени, так и в пространстве. Это позволяет корректно проводить анализ параметров орбитального движения, то есть напрямую дифференцировать и интегрировать временные зависимости пути,скорости и ускорения.
Равномерное движение планеты – поступательное перемещение L вдоль пунктирной прямой линии (рис. 1, b). Орбитальных колебаний параметров пути, скорости и ускорения в этом случае не наблюдается. При вращении, планета с каждым оборотом лишь повторяет орбитальную траекторию, совершая периодическое движение без колебаний.
Неравномерное движение выстаивается на орбите путем смещения точек пунктирной линии (рис. 1, b) за исключением «узловых» точек А (афелий) и С (перигелий). Результирующее движение описывает S – образную сигмоидальную кривую [1] (сплошная линия на рис. 1, b), напоминающую синусоиду «под углом» к оси абсцисс.
Действительно, после прохождения точки А , где скорость минимальна, движение планеты будет постепенно ускоряться до точки С , где скорость максимальна. Дальнейшее движение будет замедленным, пока планета не достигнет точки А при минимальной скорости (сплошная линия на рис. 1, b).
Нелинейная S -образная траектория орбиты планеты говорит о составном характере движения. Действительно, из графика на рис. 1, b следует, что полуорбиты между афелием и перигелием, лежащие выше и ниже разделяющей их пунктирной прямой, по мере движения планеты, с каждым новым оборотом будут периодически, почти «синусоидально», повторять свою траекторию. При этом амплитуда смещения орбитальных точек будет колебаться относительно «равновесной» пунктирной прямой. Это периодическое движение будет дополняться поступательным прямолинейным перемещением, перенося колебательный процесс по ходу движения.
Итоговое движение будет состоять из двух составляющих:
-
1) поступательного перемещения с постоянной скоростью, и
-
2) колебательного смещения точек орбиты относительно точек афелия и перигелия.
Адекватность обеих моделей на рис. 1 подтверждается использованием одинаковых значений параметров задачи. Для эллипса и его линейной развертки берется один и тот же период орбитального оборота и одинаковый пройденный путь,равный периметру эллипса на рис. 1, а, и перемещению А-(А) между конечными точками линейной развертки на рис. 1,b.
Модель S -движения (рис. 1, b) используется как базовая для расчетного анализа параметров орбитальных колебаний: пути, скорости и ускорения. Результаты расчетов содержат характеристики движения по эллиптической орбите (рис. 1, b), которые не учитывались в модели Кеплера [2]. В первую очередь, такими характеристиками являются знакопеременные ускорения орбитального движения, исследуемые в дальнейших разделах работы.
Маятник на тележке
Перед анализом параметров орбитального движения рассмотрим эвристическую модель составного колебательнопоступательного движения, которая поясняет физический смысл кеплеровской модели и в простейшей форме дает наглядную картину колебаний орбитального движении.
Поместим колеблющийся маятник на тележку, которая движется поступательно (рис. 2). В этом случае груз пружинного маятника будет совершать движение по закону сигмоиды аналогично орбитальному объекту (на рис. 1, b).
Эффективность колебательнопоступательного движения маятника на тележке определяется относительным градиентом скорости колебаний маятника, численно равным ∆V/V, где ∆V – градиент скорости маятника, V – скорость тележки. Физическое отношение ∆V/V математически совпадает с относительным стандартным отклонением [10] в статистической методах.
Покажем, что ∆V = 2Vмт, где Vмт – скорость колебаний маятника в центральной точке амплитуды ∆L при неподвижной тележке. Если тележка движется с постоянной скоростью V (рис. 2), то колеблющийся груз будет проходить через центральную
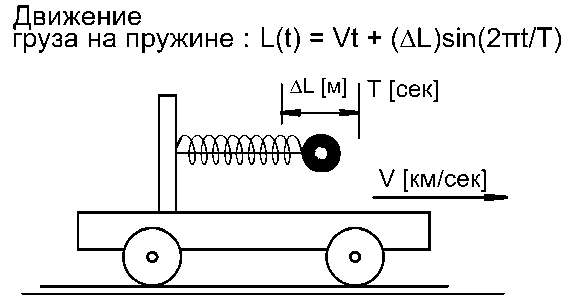
Рис. 2. Маятник на тележке. Груз на пружине перемещается по закону L(t ) [6] при колебаниях с временным (t) периодом Т и одновременном движении со средней скоростью V. Составная модель включает:
1) тележку, едущую c постоянной скоростью V вдоль оси движения L;
2) горизонтальный пружинный маятник (гармонический осциллятор) с амплитудой колебаний ∆L. Маятник жестко закреплен на тележке точку интервала ∆L с различной скоростью. По ходу движения тележки скорость будет Vmax = V+Vмт, а против хода тележки Vmin = V–xVмт. Тогдмат, ∆V = Vmax – Vmin = 2Vмт. При орбитальном движении скорость Vmin соответствует движению в афелии, а скорость Vmax – движению в перигелии.
Границы движения маятника лежат в диапазоне
0 ≤ ∆V/V ≤ 1, (1)
где нижняя граница соответствует классическому маятнику, колеблющемуся вокруг неподвижной точки, а верхняя – полной остановке тележки. При ∆V/V > 1 энергия колебаний маятника «разворачивает» поступательное движение тележки в обратном направлении.
Модель маятника на тележке можно реализовать на практике,например,в случае «парадоксальных качелей» [12]. Конструкция представляет собой двухметровую тележку, на которой жестко закреплены качели с посадочным для пассажира местом. При раскачивании качелей экипаж автономно перемещается в прямолинейном направлении путем пошагового движения с остановками, то есть при ∆V/V =1.
Описанный «парадоксальный» движитель может перемещаться не только «рывками» между остановок, но и плавно, не останавливаясь. Для этого, раскачиваясь, пассажир должен обеспечить непрерывный оптимальный градиентноскоростной режим [8], в котором прилагаемая сила по ходу движения будет
Общество
превышать силу, действующую против движения. Подобный механизм пошагового, непрерывного перемещения наблюдается в случае орбитального движения, когда планета «разгоняется» в перигелии и «затормаживает» в афелии.
Для анализа градиентов ∆V/V в табл. 1 представлены расчеты орбитальных скоростей планетного ряда по эмпирическим данным [11].
Например, по данным табл. 1 орбитальный градиент скорости движения Меркурия может быть рассчитан как ∆V/V = (58,34–38,44)/47,36 = 0,42. В этом случае планета совершает равномерное движение со средней скоростью 47,36 км/ сек, к которому «подключается» маятниковое движение с градиентом скорости ∆V = 9,90 км/сек в виде разности максимальной (58,34 км/сек) и минимальной (38,44 км/ сек) скоростей в перигелии и афелии.
Градиенты скоростей планет Солнечной системы, рассчитанные по данным табл. 1, показывают широкий разброс величин от 0,0135 (у Венеры) ≤ ∆V/V ≤ 0,982 (у Эриды), охватывающий почти весь диапазон значений в (1). Значения градиен- тов ∆V/V представляют собой важные константы для отдельных планет. Вероятно, эти параметры оптимизируют колебательную динамику всего планетарного ряда и требуют более детального изучения и анализа.
Орбитальные знакопеременные ускорения
Выше показано как эффект колебательно-поступательного движения регистрируется эмпирически при градиенте орбитальных скоростей. На простейшей эвристической модели маятника на тележке продемонстрировано, как данный эффект реализовать в технической конструкции.
Ниже на примере пяти оборотов Меркурия будет представлен подробный анализ параметров колебаний орбитального S-движения с расчетами амплитуд перемещения, скорости и ускорения планеты.
Подобный анализ проводился при использовании алгоритма D-SELF модели [6], где колебательно-поступательное S-движение рассматривалось как результат суммы трех составляющих:
Эмпирические и расчетные параметры орбитального S-движения планет Солнечной системы
Таблица 1
Общество. Среда. Развитие № 4’2024
|
№ |
Планета |
Параметры S-движения |
||||||||
|
Эмпирические |
Расчетные |
|||||||||
|
S к В Су GU ю о Ч О S GU с |
Параметры эллипса |
3 н S о а н S С |
Скорость |
6 я £Х R |
||||||
|
н н S GU н я |
3 d и - |
о Су |
ц ц я и |
3S S |
зД S < W S СЦ С |
|||||
|
сек х10 6 |
км х10 6 |
км х10 6 |
км х10 6 |
км/ сек |
км/ сек |
км/ сек |
км/сек 2 |
|||
|
1 |
Меркурий |
7,60 |
0,2056 |
57,909 |
56,672 |
359,976 |
47,36 |
38,44 |
58,34 |
5,24 ×10 –6 |
|
2 |
Венера |
19,41 |
0,0068 |
108,209 |
108,206 |
679,885 |
35,02 |
34,78 |
35,26 |
4,89 ×10 –8 |
|
3 |
Земля |
31,56 |
0,0167 |
149,598 |
149,577 |
939,886 |
29,78 |
29,29 |
30,29 |
6,31 ×10 –8 |
|
4 |
Марс |
59,35 |
0,0934 |
227,939 |
226,943 |
1429,06 |
24,08 |
21,93 |
26,44 |
1,52 ×10 –8 |
|
5 |
Церера* ) |
145,2 |
0,0793 |
413,767 |
412,462 |
2594,36 |
17,87 |
15,24 |
20,95 |
7,87 ×10 –8 |
|
6 |
Юпитер |
374,16 |
0,0485 |
778,298 |
777,382 |
4887,31 |
13,06 |
12,44 |
13,71 |
6,79 ×10 –9 |
|
7 |
Сатурн |
928,54 |
0,0555 |
1429,39 |
1427,19 |
8974,23 |
9,67 |
9,14 |
10,22 |
2,31 ×10 –9 |
|
8 |
Уран |
2642,87 |
0,0463 |
2875,04 |
2871,96 |
18054,7 |
6,83 |
6,52 |
7,16 |
4,79 ×10 –10 |
|
9 |
Нептун |
5166,71 |
0,0090 |
4504,45 |
4504,45 |
28301,7 |
5,48 |
5,43 |
5,53 |
3,79 ×10 –11 |
|
10 |
Плутон* ) |
7839,85 |
0,2459 |
5911,92 |
5730,34 |
36579,7 |
4,67 |
3,63 |
6,69 |
7,82 ×10 –10 |
|
11 |
Эрида* ) |
17610,9 |
0,4407 |
10139,9 |
9102,22 |
60538,7 |
3,44 |
2,14 |
5,52 |
3,83 ×10 –10 |
* ) – карликовые планеты
-
1) поступательного равномерного перемещения со скоростью V;
-
2) низкочастотных осцилляций с периодами Тосц = Т;
-
3) высокочастотных пульсаций с периодами Тпул.
Для орбитальной задачи полагаем, что Тпул << Тосц. Тогда в модели D-SELF реализуется два режима движения – поступательный и низкочастотный, для которых определяются временные зависимости перемещения L(t), скорости V(t) и ускорения а(t) [6]:
L1 = Vt (2)
L2 = – ∆L sin(2πt/T) (3)
L(t) = L1 + L2 = Vt – ∆L sin(2πt/T) (4)
V(t) = V – (∆L) (2π/T) cos(2πt/T) (5) a(t) = (∆L) (2π/T)2 sin(2πt/T) (6)
По формулам (2) – (6) и по данным табл. 1 для Меркурия поэтапно рассчитаны параметры S-движения.
Этап 1 . Пространственно-временные границы для 5-ти оборотов: Lг = 5×359,976×106 = 18×108 км; Тгр = 5×7,г6р×106 = 38×106 сек. По формуле (2):
L1(t) = 47,36 t [км].
Этап 2. Расчет амплитуды «внутреннего маятника» ∆L: градиент скорости между перигелием и афелием (∆V =Vпер – Vафел) входит в формулу (5) как ∆V = (∆L) (2π/T), откуда ∆L = Т (Vпер – Vафел)/2π = 7,6×106 (58,34– 38,44)/2×3,14 = 12, 08 млн км. По формуле (3):
L2(t) = – 12,08х106 sin [(2×3,14/7,6×106) t] [км].
Этап 3. По формуле (4) суммарная (L1 + L2) зависимость:
L(t) = 47,36 t – 12,08×106 sin [(2×3,14/7,6×106) t] [км].
Этап 4. По формуле (5):
V(t) = 47,36–12,08×(2×3,14/7,6×106) cos [(2×3,14/7,6×106) t] [км/сек].
Этап 5. По формуле (6):
а(t) = 12,08×(2×3,14/7,6×106)2 sin [(2×3,14/7,6×106) t] [км/сек2].
Этап 6. Корректировка фазовых и амплитудных значений параметров путем соответствия расчетных ( Этапы 1–5 ) и экспериментально-измеряемых данных.
На рис. 3 представлены временные графики параметров S -движения Меркурия. Каждой из формул (2) – (6) соответствует отдельный график на (рис. 3). Например,
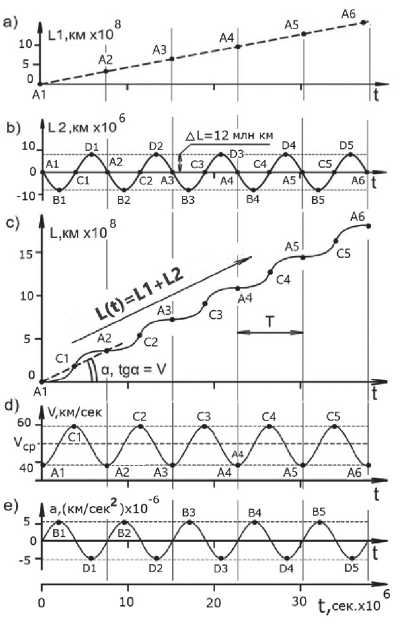
Рис. 3. Временные графики параметров S-движения Меркурия для линейно-развернутой орбиты (рис. 1, b).
Точки A, B, C, D, А соответствуют последовательному прохождению планеты по орбите в течение орбитального периода Т. Параметры рассчитаны для 5-ти оборотов, разделенных вертикальными линиями перпендикулярно оси времени t.
-
a) Перемещение L1 по орбите с постоянной (средней) скоростью.
-
b) Смещение L2 орбиты при учете градиента скорости между афелием и перигелием (табл. 1).
-
c) Результирующее перемещение L суммарного движения, состоящего из L1 и L2. Закон L(t) соответствует эвристической модели «маятника на тележке» (рис. 2).
Средняя скорость V определяется тангенсом угла α между осью времени и направлением равномерного движения (пунктирная линия).
-
d) Изменение (градиент) скорости V относительно среднего значения (производная от L по времени).
-
e) Знакопеременные ускорения а (производная от V по времени)
Общество
для формулы (2) – это (рис. 3, а), для формулы (3) – это (рис. 3, b), и так далее.
Результаты моделирования позволяют выявить отличия между колебаниями классического (гармонического) маятника и в режиме S-движения. В случае маятни-ка,все главные параметры с перемещение, скорость и ускорение, изменяют знак (направление колебательного движения) относительно неподвижной точки. В S-дви- жении изменяет знак только ускорение, а что касается остальных параметров, то скорость колеблется вокруг среднего значения в положительной области без изменения знака, а перемещение периодически повторяет форму своей S-образной траектории по сигмоиде (рис. 1, b), также без изменения знака.
Отсюда следует, что S-движение представляет особый тип квазиколебаний, при котором в явной форме, то есть при изменении знака как у маятника, колеблется только ускорение, а колебания перемещения и скорости происходят в скрытой и полускрытой форме не изменяя знака величины..
По данным табл. 1 рассчитаны знакопеременные ускорения орбитальных S-движений планетного ряда от Меркурия до Эриды (рис. 4).
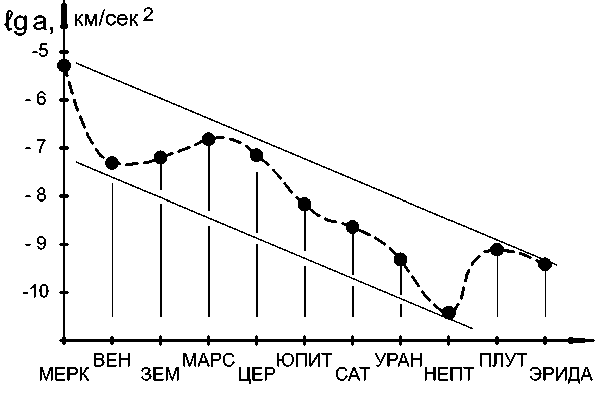
Рис. 4. Модули амплитуд орбитальных знакопеременных ускорений планет Солнечной системы
Общество. Среда. Развитие № 4’2024
При удалении планеты от Солнца наблюдается уменьшение ускорения, что говорит об ослаблении эффективности квазиколебаний при знакопеременных ускорениях. Более глубокий анализ показывает, что диапазон значений ускорения «группируется» в ниспадающем канале (параллельные линии на рис. 4). Вероятно, подобная динамика каким-то образом поддерживают устойчивость движения всего планетного ряда, или стабилизируют планетные группы.
Эмпирические основы s-движения
Чтобы лучше понять механизм и представить S-движение в пространстве, на рис. 5 рассмотрим волновое (колебательное) движение в объеме (a), на плоскости (b) и вдоль прямой линии (c).
Из (рис. 5, a) следует, что если в пространстве распространяется трехмерная волна, то эмпирически ее можно обнаружить и зарегистрировать в определенных точках, и далее анализировать. Такие модели позволяют строить алгоритмы для анализа колебаний измеряемых данных наблюдений, или при увеличении количества переменных (измерений координат) для работы с большими данными [14].
Аналогичная, и более простая ситуация, происходит при анализе движений на плоскости (рис. 5, b). Двумерные движения можно рассматривать как проекции трехмерного движения в пространственном объеме. Например, синусоида на (рис. 5, b) может выступать в роли одной из (х; y) проекций объемной волны на (рис. 5, а), имеющей три проекции (x; y, x; z и y; z).
В случае одномерного движения на (рис. 5, с) возникает принципиально иная картина по сравнению с предыдущими трехмерными и двумерными волнами. У объемных и плоскостных волн,которые движутся вдоль оси х , амплитуды колебаний регистрируются вдоль оси y (рис. 5, b) или осей y и z (рис. 5, с).
При движении одномерной волны (рис. 5, с) направление распространения волны (ось х ) совпадает с осью колебаний амплитуды, что приводит к сложности при наблюдении и регистрации такой
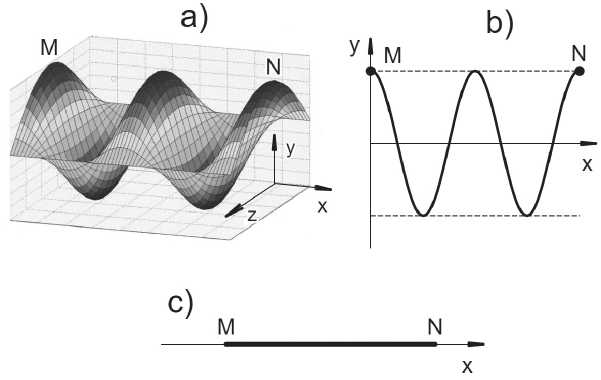
Рис. 5. S-движение в пространстве, ограниченное точками M и N, в различных координатных системах.
a) трехмерная волна в системе координат (x; y; z); b) двумерная синусоида в системе координат (x; y); c) одномерное перемещение со знакопеременными ускорениями вдоль оси х волны. Вообще говоря, этот особый вид движущейся волны становится «невидимым», и воспринимается в пространстве в виде прямой линии, что подтверждается на (рис. 5, с). Одномерная волна, как особый типа S-движения, может быть зарегистрирована путем «временной развертки» линейного перемещения точек отрезка MN на прямой рис. 5, с).
Подобная процедура использовалась выше при моделировании орбитального движения. На рис. 1 показано, как можно зарегистрировать одномерную волну S-движения на эллиптической орбите. Для этого производится линейная развертка криволинейной (эллиптической) траектории в прямолинейную, которая далее «разворачивается» во времени.
В разделе «Орбитальные знакопеременные ускорения» показано, что S-движение обусловлено и управляется знакопеременными ускорениями при изменении скорости одномерного движения. Отсюда следует, что анализ эмпирически данных S-движения следует начинать с регистрации и измерения градиентов скорости одномерного движения, и далее, построения картины временной динамики изменения скорости. Дифференцируя и интегрируя по времени динамику скорости, можно рассчитать временные зависимости знакопеременных ускорений (рис. 3, е) и пути S-движения (рис. 3, с).
Описанный механизм S-движения, характерный для орбитальных движений, представляет общий математический аппарат, широко используемый в различных областях. Например, в [9] рассматривается S-образная функция, которая управляет движением в природных, социальных и технических системах. В классическом варианте S-образная кривая, или сигмоида, сначала движется вверх пока не затронет точку перегиба. Затем следует замедление, выход на плато до второй точки перегиба, и далее – снижение. Подчеркивается, что за последние полвека роль S-движения, как общей закономерности, была всецело признана гуманитарными и прикладными науками. Траектории S-движения управляют системами и объектами от социальных институтов и политических систем до персональных роботов и беспилотных автомобилей.
Ключевым применением S-движения является использование сигмоиды в алгоритмах искусственного интеллекта [3], где сигнальные переходы в нейросетях позволяют усиливать слабые сигналы и не насыщаются от сильных сигналов.
Механизм S-движения является новым шагом в развитии модели D-SELF [5], которая применялась, как правило, для анализа сопряженных связей (групп пространственно-временных симметрий [7]) в колебательных (волновых) спектрах различных природных процессов.
Анализ орбитальных колебаний при S-движении планет позволяет использовать D-SELF моделирование в новом качестве для решения целевых прикладных задач. 6-ти этапный расчет параметров S-движения Меркурия, приведенный выше в разделе «Орбитальные знакопеременные ускорения», может быть положен в основу стандартной методики моделирования S-движения не только планет, но и других объектов.
Следствия и перспективы
-
1. Управление планетарными рисками. Знакопеременные ускорения при S-движении равны нулю в точках А и С орбиты (рис. 3, е), то есть в афелии и перигелии. Максимальные значения ускорение принимает в орбитальных точках В и D, где планета движется под действием силы F = am, где m – масса планеты. Сила F вносит дополнительные напряжения в равновесное орбитальное движение, которые могут играть решающую роль при катастрофических воздействиях на планету с внутренней и внешней стороны. Такими потрясениями могут выступать землетрясения планетарного масштаба или падения гигантских метеоритов. Например, в случае Земли при мониторинге динамики Йеллоустонского супервулкана [16] следует учитывать, в каких точках орбиты происходит активация тектонического или геотермально-взрывного [15] процесса, так как в точках B и D (рис. 3, е) будет дополнительный рост катастрофических рисков из-за фактора S-движения.
-
2. Почему эллипс? Представленная модель S-движения связана с вопросом, на который не было ответа у Кеплера. Его законы постулируют, что орбиты должны быть эллипсами. Но для чего или почему они должны иметь такую форму – остается загадкой. Механизм S-движения может приоткрыть причину (или мотивацию) эллиптичности орбит, связанную с «компенсацией» радиально-нестационарного движения.
-
3. Спутники и звезды. Модель планетарного S-образного движения пригодна для любого неравномерного орбитального вращения. Она может быть использована для анализа как спутников планет, искусственных спутников Земли, так и, вероятно, для звезд, вращающихся с градиентом скорости. Моделирование спутников, планет и звезд в рамках предложенной модели, позволит существенно сократить объемы астрономических и астрофизических вычислений при анализе больших данных в ML-методах машинного обучения (ML-machine learning) [14].
Общество. Среда. Развитие № 4’2024
Действительно, орбитальная колебательная динамика (рис. 3, с) реализуется особым, специфическим образом. Колебания параметров проходят по орбитальному периметру эллипса, не выходя
Общество
за границы его радиус-вектора в большую (от радиуса) или меньшую (к радиусу) стороны. Подобно грузу на пружине (рис. 2), движущемуся прямолинейно в осевом направлении, планета с высокой точностью следует вдоль периметра эллипса при S-движении. Но почему по эллипсу, а, например, не по кругу?
На круговой орбите также может быть реализован режим S-движения. Однако внешние силы будут стремиться дестабилизировать такое движение путем нестационарных смещений планеты в радиальных направлениях. Иначе говоря, «квазиосевому» смещению S-движения вдоль периметра будет препятствовать радиальное смещение в «нестационарном» кольце орбиты. Роль «квазиоси» выполняет круговой периметр орбиты подобно оси прямолинейного движения груза маятника на рис. 2.
Нестационарные радиальные смещения можно скомпенсировать изменением геометрии орбиты, например, ее сжатием до формы эллипса. В этом случае увеличение сжатия орбиты балансирует активизацию радиальной нестационарности движения при росте амплитуд колебаний. Это означает стабилизацию орбитального S-движения, и объясняет функциональность именно эллиптической формы орбиты, а не круговой.
Список литературы S-движение планет по эллиптическим орбитам
- Андронов А.А., Витт А.А., Хайкин С.Э. Теория колебаний. - М.: Изд-во физ.-мат. литературы, 1959. -916 с.
- Белый Ю.А. Иоганн Кеплер. - М.: Наука, 1971. - 295 с.
- Гафаров Ф.М, Галимянов А.Ф. Искусственные нейронные сети и приложения: учеб. пособие - Казань: Изд-во Казан. ун-та, 2018. - 121 с. - Интернет-ресурс. Режим доступа: https://kpfu.ru/staff_files/ F1493580427/NejronGafGal.pdf
- Гинзбург В.Л. К трехсотлетию «Математических начал натуральной философии» Исаака Ньютона // УФН. - 1987, т. 151. - С. 119-141.
- Дегтярев Г.М., Иванов-Ростовцев А.Г., Колотило Л.Г., Любченко О.А. Пространственно-временная симметрия в открытых динамических системах (Модель D-SELF) // Доклады РАН. Т. 315. - 1990, № 5. - С. 1108-1111. - Интернет-ресурс. Режим доступа: https://www.mathnet.ru/links/a662cca02186ab2 5ca1d5143ec82f7ce/dan6294.pdf
- Иванов-Ростовцев А.Г., Колотило Л.Г. Моделирование дискретно-непрерывного движения системным алгоритмом D-SELF // Международный журнал открытых информационных технологий (INJOIT). Т. 10. - 2022, № 12. - С. 35-44. - Интернет-ресурс. Режим доступа: https://www.elibrary.ru/ download/elibrary_49998630_65966775.pdf
- Иванов-Ростовцев А.Г., Колотило Л.Г., Тарасюк Ю.Ф., Шерстянкин П.П. Самоорганизация и саморегуляция природных систем (Модель, метод и основы теории D-SELF). - СПб.: Русское географическое общество, 2001. - 216 с.
- Каюмов О.Р. Оптимальное по быстродействию перемещение тележки с маятником // Известия РАН. Теория и системы управления. - 2021, № 1. - С. 30-41. - Интернет-ресурс. Режим доступа: https://sciencejournals.ru/cgi/getPDF.pl?jid=teorsist&year=2021&vol=2021&iss=1&file=TeorSi st2101007Kayumov.pdf
- Кржнарика Р. На 100 лет вперед: Искусство долгосрочного мышления, или Как человечество разучилось думать о будущем. - М.: Альпина Паблишер, 2020. - 362 с.
- Крылов В.Е. Общая теория статистики. - Владимир: Изд-во Владимирского гос. Ун-та, 2020. - 243 с.
- Ксанфомалити Л.В. Большая российская энциклопедия 2004-2017. Планеты. - Интернет-ресурс. Режим доступа: https://old.bigenc.ru/physics/text/3143354#litra
- Кулага И. Парадоксальные качели // Наука и жизнь. - 1999, № 3. - Интернет-ресурс. Режим доступа: https://www.nkj.ru/archive/articles/8798/
- Субботин М.Ф. Введение в теоретическую астрономию. - М.: Наука, 1968. - 800 с.
- Acquaviva V. Machine Learning for Physics and Astronomy. - Princeton.: Princeton University Press, 2023. - 280 p.
- Poland M., Hurwits Sh. The probability of hydrothermal eplosions in Yellowstone. August 5, 2024. - Интернет-ресурс. Режим доступа: https://www.usgs.gov/observatories/yvo/news/proability-hydrothermal-explosions-yellowstone
- Yellowstone Volcano Observatory. - Интернет-ресурс. Режим доступа: https://www.usgs.gov/yvo
