Scalar Diagnostics of the Inertial Measurement Unit

Author: Vadim V. Avrutov
Journal: International Journal of Intelligent Systems and Applications(IJISA) @ijisa
Article in issue: 11 vol.7, 2015.
Free access
The scalar method of fault diagnosis systems of the inertial measurement unit (IMU) is described. All inertial navigation systems consist of such IMU. The scalar calibration method is a base of the scalar method for quality monitoring and diagnostics. Algorithms of fault diagnosis systems are developed in accordance with scalar calibration method. Algorithm verification is implemented in result of quality monitoring of IMU. A failure element determination is based in diagnostics algorithm verification and after that the reason of such failure is cleared. The process of verifications consists of comparison of the calculated estimations of biases, scale factor errors and misalignments angles of sensors to their data sheet certificate, which kept in internal memory of navigation computer. In result of such comparison the conclusion for working capacity of each one IMU sensor can be made and also the failure sensor can be deter-mined.
Fault diagnosis, inertial measurement unit, inertial navigation systems, scalar calibration, quality monitoring and diagnostics
Short address: https://sciup.org/15010763
IDR: 15010763
Text of the scientific article Scalar Diagnostics of the Inertial Measurement Unit
Published Online October 2015 in MECS
In recent years, the strong requirements for safety of autonomous vehicles caused new demands for reliability of the Inertial Navigation Systems and Inertial Measurement Units as their component parts. It is a reason for an increasing and expanding their testing program and using of fault diagnosis systems, which includes the capacity of detecting, isolating and identifying faults.
There are different methods of fault diagnosis of Inertial Navigation Systems (INS). More simple and wide application is monitoring of output level of signals of INS components parts made by technology of Built In Test Equipment (BITE) [1,2]. Besides, diagnostics could be made by multiple-choice alternative methods of optimal filtration [3,4] and functional diagnostic model methods [5]. If the functional diagnostic model methods are using for IMU and based on application of redundant or extra number of sensors, optimal filtration methods are using whole INS and required other information of instruments, which working on diverse from inertial technology principles (for example, information from satellite navigation receiver GPS/GLONASS or Doppler radar).
Above mentioned approaches are based on quantitative or numerical models, when using or generating signals that reflect inconsistencies between nominal and faulty system operation.
During the last time many investigations have been made using qualitative or analytical models, using neural networks [6, 7] and fuzzy logic techniques [8, 9].
From another side, it is known a scalar calibration method [10-12]. In that papers are described main features of a scalar calibration method for an inertial measurement unit consisting of gyroscopes and accelerometers. The method allows determine biases, scale factor errors and mounting misalignments of the sensors without applying special requirements for alignment of test equipment and sensors alignment on the test equipment. But it requires sufficiently high accuracy of measurement of the output signals of sensors: the algorithm works fine when the number of digits is at least eight decimal places in normalized output signals [12].
In this paper is suggested to use together scalar calibration method of gyroscopes and accelerometers [11] for fault diagnosis of IMU of Inertial Navigation Systems and also functional diagnostics model methods. But redundant sensors are not required for new method of scalar diagnostics. Normally it can use output signals of three gyros and three accelerometers only.
-
II. Scalar Diagnostics on the Stationary Base
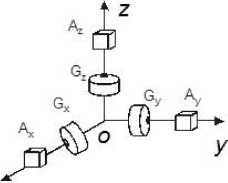
Let us consider IMU of strapdown INS [13] (Fig.1) consisting from a triad of single degree-of-freedom gyroscopes G , G , G and a triad of accelerometers A , A , A that are mounted to a vehicle with body frame oxyz with orthogonal sensitivity axes, as shown on Fig. 2.
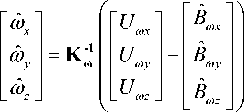
Taking into consideration the errors of instruments (biases, scale-factor errors), mounting misalignments of the gyroscopes and accelerometers, which cause crosscoupling terms, and in-run random bias errors, the gyro’s output signals may be expressed as shown below:
|
\U- 1 |
Г B. 1 |
o x |
" wox " |
||||
|
U- |
= |
B rny |
+ K ■ |
. y |
+ |
w m y |
. (1) |
|
U |_ .Z J |
B .z |
_® z _ |
_ w .z _ |

Fig.1. Inertial measurement unit with USB-port
Accelerometer’s output signals also may be expressed as shown below:






G , Q - is a n x 9 i of the acceleration g a | atrixes of normalized projections | |||
ind turn rate Q | of dimension: | |||
gx 1 | gx2 | gxn | ||
gy 1 | gy2 | gn | ||
gz 1 | gz2 | gn | ||
gx21 | gx22 | gL | ||
GT = | g21 | gy22 | g,. | ; |
gz2 | gz22 | . Szl | ||
gx 1 gy 1 | gx2gy2 | gxngyn | ||
gx 1 gz 1 | gx2gz2 | gxngzn | ||
_ gy 1 gz 1 | gy2gz2 | gyngzn | ||
■ Q x 1 | Qx 2 • • • | Q " xn | ||
Oy 1 | Qy 2 • •' | Q yn | ||
Q.• 1 | Q,. z | Q zn | ||
Q 21 | Q22 | Q2 xn | ||
Q' = | O 21 | O 2 z - | Q2n | ; |
qz 1 | Qzz | 2 zn | ||
Q x 1Q y 1 | Qx 2 Qy 2 | Q Q xn yn | ||
Qx 1Q z 1 | Qx 2 Qz2 - | Qxn Qzn | ||
Oy 1Qz1 | Qy 2 Qz 2 | Oyn Qzn _ | ||
gxn gyn gzn
Solving the matrix equation (9) by least-squares method, we obtain:
eg =(GTG rGTUg,
, en =(^T^)- nTufi
where eˆ , eˆ - is an estimating values of the unknown parameters of inertial measurement unit.
Thanks to the least squares method the results are smoothing, and as long as average of distribution is equal to zero
M {nx }= M {n }= M {nz } = 0, then estimated values eˆ , eˆ will not have a random noise:
.
According to introduced relationships (5) we can calculate estimations of B„(a)x , B„(a)y,, B„(a)z and Ea(a)x , Em(a)y , Em(a)z as follows:
ˆ aj
/X/X
ˆˆ gj ajg; aj aj aj ;
ˆˆˆ toj Пj coj ; toj coj coj
When estimated values (12) are calculated, it is possible to use following set of predicates, which are expressed the algorithm of diagnostics of gyroscopes triad on stationary base:
Fln ( tk ) = ЛC {| Bax— Bax\-An} = ;
F2n(tk ) = ЛП {|Bay - Bay | -An} = ;
M tk )=ЛП{| Bi ax - Bax | -Ad}^
F4n (tk ) = ЛП {|Eax- Eax | - A4n } = ^q;
F5n( tk )=ЛП{| E?ay - Eay\ -A5n}={1;
F6n(tk ) = ЛП {|Eaz— Eaz | —Абд } = ^Q ;
F7tl(tk )= ЛCl {| Bal —Bal | - Лй} = ^q;
F8n(tk ) = ЛП {|Ba2 —Baz| -Лп} = ;
F9n( tk ) = ЛЙ{| Bia 3 — Ba з| - ^9^}=^!.
Here A, Aci, Ad — border values of gyro biases, Ad, Ad, Ad — border values of gyro scale factor errors, Ad, Ad, Ad — border values of gyro mounting misalignments. If the difference between calculated values eˆ will not more than a values ±A , therefore a triad of gyroscopes has being in operable state. If not, therefore there is a failure. The number of eˆ , which are excited out of value ±A , indicate not only what gyro is failure, but also indicate a reason of failure: excessing of real biases, scale factor errors or mounting misalignments to their nominal values.
The scheme of scalar method of fault diagnosis systems of IMU is depicted in the Fig. 5. Here numbers 1, 2, 3 is shown the gyro’s failures via biases discrepancy, numbers 4,5,6 - gyro’s failures via scale factor errors discrepancy and numbers 7,8,9 - gyro’s failures via mounting misalignments discrepancy.
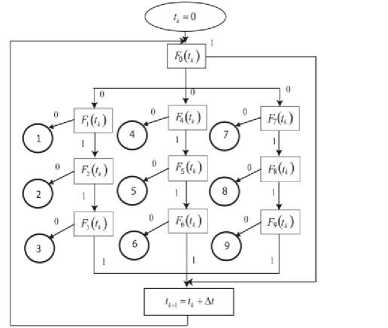
Fig.5. Scheme of scalar method of fault diagnosis systems of gyro’s triad IMU
III. The Scalar Diagnostics on the Moving Base
Let us consider scalar diagnostics on the moving base. Using initial equations (1) and (2) we can receive following relations for gyro cluster
Umx = Bmx + (Smx + Emx ) ®x + SmxAxz®y - SmxAxy®z + wmx ;
Umy = Bmy + (Smy + Emy ) ®y - SmyA.z® + SmyAyx^z + w^y ;
Urnz = Bmz + (Smz + Emz ) ®z + SmzAzy®x - SmzAzx^y + w^z , and for accelerometer’s cluster
Uax = Bax+ (Sax+ Eax ) ax+ SaxAxzay - SaxAxyaz+wax ;
U = В + (S +E -S A a +S A a +w ;
ay ay ay ay y ay yz x ay yx z ay ;
Uaz = Baz+ (Saz+ Eaz ) az+ SazAzyax - SazAzxay+waz •
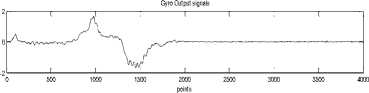
Fig. 6 and Fig. 7 shows examples of output signals of gyroscopes and accelerometers of IMU with USB-port [13] on the moving base (takeoff with sharp turn).

points
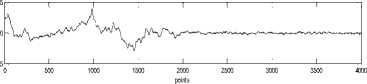
Fig.6. Output signals of gyroscopes ADXRS22295 (Gx and Gy) and ADXRS300 (Gz) on the moving base.
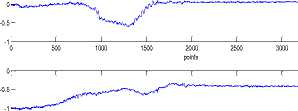
Accelerometer Output signals

-0.5
500 1000 1500 2000 2500 3000
points
3500 4000
3500 4000
-1.5
0 500 1000 1500 2000 2500 3000 3500 4000
points
Fig.7. Output signals of accelerometers ADXL202 (Ax, Ay and Az) on the moving base.
According to scalar diagnostics method let's divide every expression of output signal of accelerometer on corresponding scale factor and vector's module a = 4a2 +a2 + a=2 and every expression of output gyro signal on corresponding scale factor and vector's module to = X / ®x + ®2 + ®z • xyz
New denotations of dimensionless output signals and values of right parts will be as follows:
Uaj | a =-; baj = a | Baj | |
uj= Sja1 aj | Saja; | ||
E e . = —-;n . = ajaj Saj m, m = — ; b™j m | n aj | Uj. | |
;u S4a " =Bmj^; e | Smj® E®l. | (16) | |
Smj®’m | Smj’ | ||
nml | |||
nmj c • Smj® |
Here j = x, y, z.
On the stationary base we should to use magnitude of gravity vector g and Earth's rate Q . But how we can get current values of a.,a,,,a, and m ,ю ,m on the xyz x y z moving base for calculations of a = Ja2 + a2 + a2 and to = x Z®2 + ®2 + юЮ ?
xyz
Solving equations (1) and (2), we can receive estimated values <yv, <y,,, <y,: xyz
Also estimated value of the
1 /X /X /X accelerations a ,a ,a xyz
could be calculated as
Now we can receive a = . № + a2 + a2 and xyz to = . Ito + to + to . xyz
As far as on the moving base for the triad of gyros юг2+ ®2 + Ю2= 1 we will have following equation:
12 22
2 \ mx my
(bmx + nmx )mx + (bmy + nmy )юу + (bmz + nmz )Юх
+emxmx + emymy + emzmz +
8rnimxmy+8ffl2mxmz+8ffl3mymz •
For the triad of accelerometers a2 + a2 + a2 = 1 will xyz get us similar equation:
— (u2+ u2+ u2-1) = ax ay az
(bax+nax )ax+ (bay+nay )ay+ (baz+naz )az+ (20)
+eaxaX+eayay+eazaZ+
5a 1 axay+ 5a2axaz+ 5a3ayaz •
u
12 2 2 2 ( uax 1 + uay 1 + uaz 1 | -1) |
12 2 2 — 1 I n + U n + U n ax2 ay2 az2 | -1) |
1 222 axn ayn azn | -1) |
Hence, the difference between the scalar value of the normalized measurable vector and his actual value that is equal to one, proportional to the errors of the inertial instrument cluster. Coefficients in this dependence are the normalized values of measurable acceleration av,a .a for accelerometers and angular rate to,ю,,to xyz xyz for gyros, their exponential orders and compositions.
Analogically to algorithm of scalar monitoring on the stationary base, from equations (19) and (20) we can build the algorithm of scalar method of quality monitoring for triad of accelerometers and gyros for moving base. For sampling time t it is possible to establish following below predicates:
F0a (tk ) = Л0a |“(uax + uay + ^z - —) - A0a ^ = ^Q ,^^
u
" 1Л, 2 2(utox 1 | +utoy 1 | +utoz 1 | -1) |
1Г 2 2 ( utox 2 | + uray 2 | + utoz г | -1) |
....... 1/ 2 — \u 2 \ toxn | 2 toyn | 2 tozn | • -1 |
A , to - is a n x 9 matrixes of normalized projections of the acceleration a and turn rate to of dimension:
K-At, ) = Л0| — (u2 + u2 + u2 -1) - A 1 = 1 .
Oto \ kJ 0 2 ' tox toy toz / O®Q
Here in right part a value ‘1’ is mean an operable state of a triad of accelerometers
or gyroscopes, a value ‘0’ – a his failure, Aa -
12 2 2
— \ ll + и + и ax ay az
-1) •
(uax+"to +"to - 1) will
a border value of function
If the value of function not more than a value 2Ag , therefore a triad of accelerometers has being in operable state. If not, therefore there is a failure. The same rule is valid for quality monitoring of gyros.
When the task of the quality monitoring is solved it is necessary to find a place and clear the reason of failure.
For that 18 unknown parameters should be found from equations (19) and (20). These 18 parameters are distorted of the inertial instrument cluster output signals. Six of them are differences of mounting misalignments angles of the devices.
Consider the equation (19) and (20) in matrix-block form:
ax 1 | ax2 | • axn | |||
ay1 | ay2 | • ayn | |||
az1 | az2 | • azn | |||
ax21 | 2 ax22 | 2 xn | |||
AT | = | ay21 az21 | ay22 az22 | ■ ayn • azn | |
ax1ay1 | ax2ay2 | • axnayn | |||
ax1az1 | ax2az2 | • axnazn | |||
L ay 1 az 1 | ay2az2 | • aynazn _ | |||
г | tox 1 | tox 2 • | • toxn " | ||
toy 1 | toy 2 • | • toyn | |||
toz 1 | toz 2 • | • tozn | |||
— 2 tox1 | tox2 • | . to2 xn | |||
ωT | = | toy1 toz21 | toy2 • — 2 toz2 • | — 2 • toyn . tozn | |
tox 1toy 1 | toto x2 y2 | ■ toxntoyn | |||
tox 1toz 1 | tox 2toz 2 • | • toxntozn | |||
L | toy 1toz 1 | toy 2toz 2 • | • toyntozn _ | ||
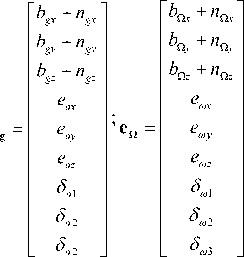
ea, eto - is a 9 x 1 column vectors of unknown parameters
u = A • ea, aa
, ωω
where ua,ufiis a nx1 column vectors of the normalized inertial measurement unit output signals:
bax+nax | b„x+ n„x | ||
bay+nay | b„y+ntoy | ||
baz+naz | b«,-.+ n™z | ||
eax | etox | ||
ea = | eay | ; e«, = | еЮу |
eaz | e„z | ||
5a 1 | 5. | ||
5a 2 | 5m 2 | ||
5a 2 | 5„з |
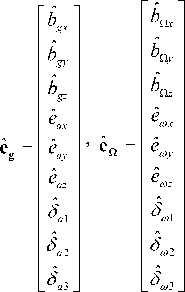
Solving the matrix equation (23) by least-squares method, we obtain:
where eˆ ,eˆ - is an estimating values of the unknown parameters of inertial measurement unit.
Thanks to the least squares method the results are smoothing, and as long as average of distribution is equal to zero
F5a (tk )=Лa {| E?a, — Ea,| < ^5 a } = ^ F6a (tk ) = A a {| Eiaz — Eaz\< ^6 a }= ^ F7a (tk )=A a {| Bia 1 — 5a J < X, a } = {^; F8a (tk )=A a {| 5a 2 — Ba 2| < X8 a } = ^ F9a (tk ) = A a {| 5a 3 — Ba з| < Л9 a } = |1-
M {nx } = M {n, } = M {n}= 0, then estimated values eˆ , eˆ will not have a random noise:
a, ω
According to introduced relationships (16) we can calculate estimations of B,(a)x , B(a), , B,(a)z and E™(a)x , EX(a), , Em(a)z on moving base as follows:
В = b Sa; E = e S ;
aj gj aj aj aj aj
ˆ toj Qj toj ; ^j ^j toj.
And algorithm of scalar method of diagnostics of accelerometers triad will correspond to predicates
F1a (tk )=A a {| Bia — Bax\< X a }= ^ F2a (tk )=A a {| Biay — Bay | < ^ a }= ^ Fa (tk )=Л a {| Biaz - Baz\< X a j^ F4a (tk )=A a {| Eax — Eax| < ^4 a }= ^
Here Xa, Xa, Xa — border values of accelerometers biases, Xa, Xa, Xa — border values of accelerometers scale factor errors, Xa, Xa, Xa — border values of accelerometers mounting misalignments. If the difference between calculated values e will not more than a values ±X , therefore a triad of gyroscopes has being in operable state. If not, therefore there is a failure. The number of eˆ , which are excited out of value ±X, indicate not only what gyro is failure, but also indicate a reason of failure: excessing of real biases, scale factor errors or mounting misalignments to their nominal values.
IV. Conclusions
In this paper we have proposed a new method of fault diagnosis of Strapdown Inertial Navigation Systems. The scalar calibration method is a base of the scalar method of quality monitoring and diagnostics. Algorithms of fault diagnosis systems are developed in accordance with scalar calibration method. In result of quality monitoring algorithm verification is implemented the working capacity monitoring of IMU. A failure element determination is based in diagnostics algorithm verification and after that the reason of such failure is cleared.
The process of verifications consists of comparison of the calculated estimations of biases, scale factor errors and misalignments angles of sensors to their data sheet certificate, which kept in internal memory of computer. In result of such comparison the conclusion for working capacity of each one IMU sensor can be made and also the failure sensor can be determined.
Acknowledgements
I am thankful to Mr. Bob Sulouff, Vice-President of Analog Devices Inc. ® and his team for great support and samples of ADI gyroscopes and accelerometers.
I am very grateful to Dr. Oleg Stepanov, Professor of St. Petersburg ITMO University for time in Ladoga and kind comments.
Also I am thankful to my parents and my family who have always believed me.
References Scalar Diagnostics of the Inertial Measurement Unit
- V. Avrutov, N. Bouraou, Reliability and Fault Diagnosis. – LAP Lambert Academic Publishing, 2015. – 164 p. (ISBN 978-3-659-64879-3) - In Russian.
- D. Titterton, J. Weston, Strapdown Inertial Navigation Technology - 2nd Edition, Institution of Electrical Engineers , UK, 2004 - 558 p.
- S.P. Dmitriyev, N.V. Kolesov, A.V. Osipov, Information Reliability, Monitoring and Diagnostics of Navigation Systems. – SPb: GNC RF – CSRI ‘Electropribor’, 2003. – 207 p. (ISBN 5-900780-46-5) – In Russian.
- S.P. Dmitriyev, O.A. Stepanov, S.V. Shepel, “Nonlinear Filtering Methods: Application in INS Alignment,” IEEE Transactions on Aerospace and Electronic Systems, Vol. 33, No. 1, 1997, pp. 260-271.
- A.S. Kulik, S.N. Firsov, Do Kuok Tuan, O.Y. Zlatkin, “A Fault Diagnosis of Strapdown Inertial Navigation System for unmanned aircraft”. – Radio Electronics and Computer Systems, 2008, v.1 (28), pp.75-81. - In Russian.
- R.J. Patton, P.M. Frank, R.N. Clark, “Issues in fault diag-nosis for dynamic systems”. – Springer-Verlag, London, 2000.
- Puneet Kumar Singh and D. K. Chaturvedi, “Neural Net-work based Modeling and Simulation of Transformer In-rush Current”. I.J. Intelligent Systems and Applications, 2012, 5, pp.1-7.
- K. A. Ellithy, K. A. El-Metwally, “Design of Decentralized Fuzzy Logic Load Frequency Controller. I.J. Intelligent Systems and Applications, 2012, 2, pp.66-75.
- Y. V. Bodyanskiy, O. K. Tyshchenko, D. S. Kopaliani, “An Extended Neo-Fuzzy Neuron and its Adaptive Learn-ing Algorithm”. I.J. Intelligent Systems and Applications, 2015, 02, pp.21-26.
- E. Izmailov, S. Lepe, A. Molchanov, E. Polikovsky, “Scalar method of calibration and balancing of Strapdown Inertial Navigation Systems”. 15-th St. Petersburg International Conference on Integrated Navigation Systems. St. Pe-tersburg, Russia, - State Research Center (CSRI) Elektro-pribor, 2008, pp.145-154. - In Russian.
- V. Avrutov, “On Scalar Calibration of an Inertial Instru-ment Cluster”. Innovation and Technologies News, 2011, No. 2(11), pp. 22-30
- V. Avrutov, S. Golovach, T. Mazepa, “On Scalar Calibra-tion of an Inertial Measurement Unit”. 19-th St. Petersburg International Conference on Integrated Navigation Systems. St. Petersburg, Russia, 2012. - State Research Center (CSRI) Elektropribor, 2012, pp.117-121.
- V. Avrutov, I. Sturma, “Inertial Measurement Unit with USB-Port”. 19-th St. Petersburg International Conference on Integrated Navigation Systems. St. Petersburg, Russia, 2012. - State Research Center (CSRI) Elektropribor, 2012, pp.194-195.
