Совершенствование процесса управления автомобильной мойки с использованием нейросетевых технологий

Автор: Мяло О.В., Мяло В.В.
Журнал: Вестник Восточно-Сибирского государственного университета технологий и управления @vestnik-esstu
Рубрика: Технологии, машины и оборудование для агропромышленного комплекса (технические науки)
Статья в выпуске: 1 (96), 2025 года.
Бесплатный доступ
В последние годы нейросетевые технологии и модели на их основе находят применение в разных отраслях промышленности, на предприятиях агропромышленного комплекса и в автомобильном сервисе. С целью совершенствования работы и управления процессом портальной мойки автомобилей, применяемых на предприятиях агропромышленного комплекса, авторами предложено использовать нейросетевые технологии. При построении математической модели выходных параметров автомойки на основе нейронной сети выбраны следующие: геометрические размеры автомобиля и модель, а также степень загрязненности автомобиля, от которых будут зависеть выходные параметры: расход воды, моющих средств, время и цикл мойки. Установлено, что нейросетевой алгоритм, распознающий уровень загрязнения и тип автомобиля, можно применить для управления подачей воды в портальной мойке, что должно уменьшить расход воды и в целом повысить энергоэффективность мойки. Обоснованы параметры портальной мойки для автомобилей. Определены технологии работы нейросетевого алгоритма в портальной мойке для автомобилей. Разработан алгоритм, определяющий класс автомобиля и ее загрязнение. Практическая значимость работы заключается в обосновании применения автоматической портальной мойки автомобилей для очистки их путем струйной подачи воды с высоким давлением, а также обоснована необходимость совершенствования управления портальной мойкой, на основании новых алгоритмов управления для экономии расхода воды, электроэнергии и времени очистки автомобилей разных марок.
Уборочно-моечные работы, портальная мойка, нейросеть, автомобиль, алгоритм управления, пороговое значение
Короткий адрес: https://sciup.org/142244157
IDR: 142244157 | УДК: 621.3.078.3 | DOI: 10.53980/24131997_2025_1_64
Improvement of car wash control using neural network technologies
In recent years, neural network technologies and models have been used in various industries, at agroindustrial enterprises and in car service. In order to improve the operation and management of portal car wash process at agro-industrial enterprises, the authors proposed neural network technologies. When constructing a car wash mathematical model based on neural network, the following output parameters were selected: geometrical dimensions of a vehicle and its model, as well as the dirtiness of the vehicle and its type. Water and detergent consumption, washing time and washing cycle are dependent on the output parameters. It is found that a neural network algorithm recognizing the dirtiness level and vehicle type can be applied to control the water supply in a portal wash, which should reduce water consumption and generally increase the energy efficiency of the wash. The parameters of a portal car wash are substantiated. Neural network algorithm techniques in a car wash are identified. The authors created an algorithm determining vehicle class and dirtiness. The study proves the effectiveness of automatic portal car washing for vehicle cleaning with high pressure water jetting, as well as the need to improve the portal wash control, based on new control algorithms to save water, electricity and time consumption when cleaning vehicles of different makes.
Текст научной статьи Совершенствование процесса управления автомобильной мойки с использованием нейросетевых технологий
Одним из видов вспомогательных работ при проведении операций технического обслуживания и ремонта автомобилей в агропромышленном комплексе являются уборочно-моечные работы, которые необходимы также в процессе их рядовой эксплуатации. Решение проблем качественной очистки автомобилей в современном сервисе требует поиска новых нестандартных решений по совершенствованию моечного оборудования, направленного на снижение материальных и трудовых затрат, повышение производительности и соблюдении норм экологического законодательства [1]. В последние годы нейросетевые технологии и модели на их основе находят достаточно широкое применение в сельскохозяйственном производстве, промышленных предприятиях, а также в автомобильном сервисе [2, 3]. Авторами на основе анализа определены основные технические и организационные мероприятия при внедрении нейросетевой технологии в процесс уборочно-моечных работ станций технического обслуживания автомобилей, в сервисных центрах предприятий АПК и дилеров [4]. Процесс исследования направлен на совершенствование системы управления работой портальной мойки автомобилей на основе нейросетевых технологий. В качестве математической модели выбрана модель нейронной сети, которая учитывает зависимости расхода воды, моющих средств, времени и цикла мойки от геометрических размеров и формы автомобиля с учетом степени загрязненности автомобиля.
Цель исследования – повышение эффективности процесса наружной очистки автомобилей путем уменьшения расхода воды и повышения энергоэффективности портальной мойки для автомобилей путем применения нейросетевого алгоритма управления.
Материалы и методы исследования
Для выбора необходимого оборудования был проведен поисковый эксперимент, в ходе которого исследованы параметры и особенности нескольких типов моечных установок, применяемых в сельскохозяйственных предприятиях и на станциях технического обслуживания автомобилей. Проанализированы конструкции струйных моечных установок, пенных моечных установок, моечных установок с использованием при мойке горячей воды, автоматических моечных установок, многофункциональных моечных установок [5]. В процессе анализа конструкций применяемых моечных установок в качестве сравниваемых параметров приняты: расход воды на мойку одного автомобиля, время очистки легковых автомобилей. Сравнительные характеристики рассмотренных установок представлены на рисунках 1, 2.
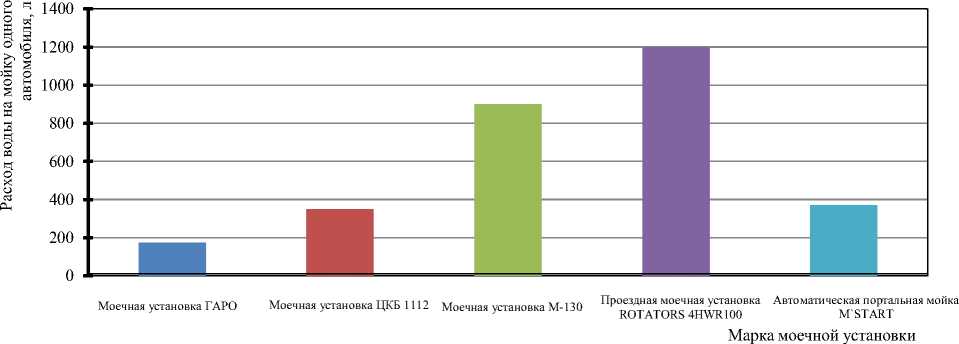
Рисунок 1 – Гистограмма расхода воды на мойку одного автомобиля
По показателю, представленному на рисунке 1, можно сделать следующий вывод: самый малый расход воды имеет моечная установка ГАРО, при этом данная установка струйного типа работает при высоком давлении воды, обычно от 100 до 200 бар, что позволяет эффективно и быстро удалять грязь, пыль, масло и другие загрязнения с поверхности автомобиля. При всех имеющихся достоинствах установка ГАРО уступает многофункциональным моечным установкам, которые представляют собой более продвинутые и разносторонние устройства и позволяют не только мыть автомобиль, но и выполнять другие функции, такие как полировка, нанесение защитных покрытий, удаление вмятин и царапин, а также обработка и очистка салона [6].
Сравнение времени работы рассматриваемых установок на 1 единицу техники представлено на рисунке 2.
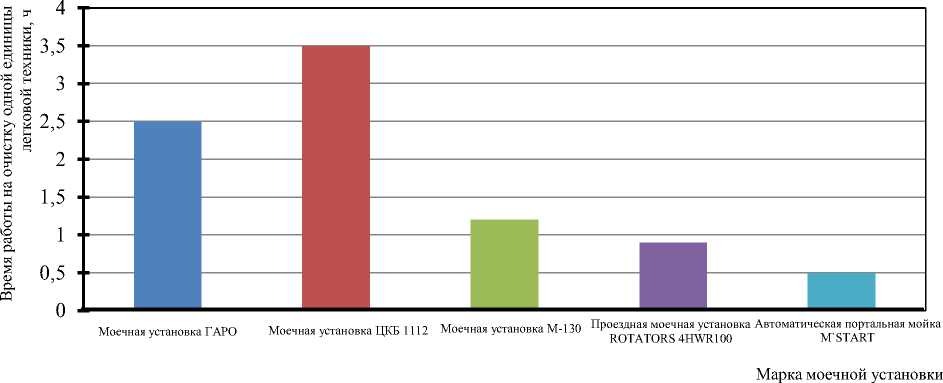
Рисунок 2 – Гистограмма распределения времени очистки автомобилей разными типами моечных установок
По показателю затрат времени на очистку автомобилей меньшее значение имеет автоматическая портальная мойка M`START. Особенностью портальной мойки автомобилей M`START является автоматизация процесса. Это уменьшает вероятность ошибок и обеспечивает более высокое качество мойки. Автоматическая мойка значительно сокращает время мойки автомобиля [7].
На основании двух оценочных показателей работы моечных установок составлена диаграмма распределения эффективности использования различных конструкций моек при техническом обслуживании автомобилей, применяемых на предприятиях агропромышленного комплекса в процентном соотношении (рис. 3).
На основании проведенного анализа рациональным выбором для очистки легковых автомобилей мы считаем автоматическую портальную мойку M`START. Ее работа базируется на водоструйной очистке, в основу которой положена сила гидравлического удара, что может служить базой для дальнейшего совершенствования и применения устройства акустико-кавитационного действия [8]. При анализе работы портальной мойки M`START был выявлен ряд недостатков. Например, качество очистки автомобиля зависит от степени его загрязнения и конструктивных особенностей. Программы, которыми оснащена мойка, направлены на выполнение стандартных циклов, ограниченных по расходу воды и времени очистки и не всегда работающих при отмывании сильных загрязнений. Особенно этот недостаток может проявиться при мойке автомобилей, используемых в сельскохозяйственном производстве, и крупногабаритной техники.
Время работы на очистку одной единицы легковой техники, ч ; Автоматическая портальная мойка M`START ; 28%
Время работы на очистку одной единицы легковой техники, ч ;
Моечная установка ГАРО ; 22%
-
■ Моечная установка ГАРО
-
■ Моечная установка ЦКБ 1112
-
■ Моечная установка М-130
-
■ Проездная моечная установка ROTATORS 4HWR100
Время работы на очистку одной единицы легковой техники, ч ; Моечная установка ЦКБ 1112 ; 17%
Время работы на очистку одной единицы легковой техники, ч ; Проездная моечная установка ROTATORS 4HWR100 ; 18%
Время работы на очистку одной единицы легковой техники, ч ;
Моечная установка М-130 ; 15%
Рисунок 3 – Эффективность применения моек различных конструкций на станциях технического обслуживания (СТО) по двум показателям оценки, %
С целью получения лучшего результата приходится выбирать более продолжительный цикл мойки, что способствует увеличению затрат времени и средств или повторять циклы мойки несколько раз. Причиной этому является использование традиционных математических моделей при программировании, которые дают узкий разбег реализации зависимостей. Решение этой проблемы является актуальным на данный момент.
Одним из возможных подходов к оптимизации процесса мойки является использование системы управления на основе датчиков, которая будет автоматически изменять режимы отчистки [9, 10]. Датчики определения степени загрязнения автомобиля могут передавать информацию системе управления, которая будет автоматически регулировать параметры мойки для достижения оптимальных результатов.
Такие системы управления могут быть реализованы с использованием современных технологий Интернета вещей (IT), машинного обучения и алгоритмов искусственного интеллекта. Это позволит создать интеллектуальную систему, способную адаптироваться к различным условиям мойки и обеспечивать оптимальное использование ресурсов.
Такой подход не только повысит эффективность процесса мойки, но и снизит потребление воды, электроэнергии и моющих средств, что, в свою очередь, будет положительно сказываться на экологической стороне процесса мойки [11].
Результаты исследования и обсуждение
В контексте промышленных агрегатов и систем управления, использование искусственных нейронных сетей может значительно повысить эффективность управления электро-приводными комплексами, особенно при изменении в широком спектре различных параметров механической части и режимов работы электропривода [12]. Это позволяет создавать более гибкие и точные системы управления, способные адаптироваться к новым условиям работы оборудования. Работу нейронных сетей можно описать так: на вход поступают сигналы через несколько входных каналов. Сигнал проходит через соединение (синапс), который имеет определенный вес. У каждого нейрона имеется определенное пороговое значение. Затем вычисляется взвешенная сумма входов, из которой вычитается пороговое значение, и в результате получается величина активации нейрона. С помощью функции активации данное значение преобразуется, и в результате получается выходной сигнал.
Вся работа начинается с ввода требуемых параметров оператором, далее используемая в алгоритме, нейронная сеть фотографирует автомобиль, прибывший на мойку, распознает его параметры, определяет степень загрязнения и подстраивает программу мойки на требуемое давление воды, моющее средство и время очистки. При проверке работы нейронной сети оценили ее способность классифицировать автомобили по маркам и в зависимости от степени их загрязнения управлять мойкой. При оценке были заданы следующие показатели: «форма автомобиля», «степень загрязнения», «подача воды».
Габаритные размеры LADA 2121: длина 3740 мм, ширина 1680 мм, высота 1640 мм, форма кузова – 1.
Габаритные размеры LADA 2107 Седан: длина 4145 мм, ширина 1620 мм, высота 1446 мм, форма кузова – 2.
Степень загрязнения разделили на три степени: низкая - 1 - 3; средняя - 4 - 6; высокая - 7 - 9, «0» соответствует чистой машине.
С помощью программы Deductor проверили умение нейронной сети классифицировать объекты LADA 2121 и LADA 2107 по геометрическим параметрам и форме, по степени загрязнения. Таким образом, после определения типа машины и степени загрязнения рассчитали необходимый объем воды и давление подачи.
Ожидаемые варианты для LADA 2121: Y11 – низкая степень загрязнения, Y12 – средняя степень загрязнения, Y13 – высокая степень загрязнения, Y10 – чистый автомобиль.
Ожидаемые варианты для LADA 2107: Y21 – низкая степень загрязнения, Y22 – средняя степень загрязнения, Y23 – высокая степень загрязнения, Y20 – чистый автомобиль.
Габаритные размеры (длина, ширина и высота) – X1 X2 X3 соответственно, X4 форма автомобиля, X5 – степень загрязнения. Эти вариации нужны для составления обучающей выборки таблицы 1.
Введенные данные из таблицы 1 в программу Deductor представлены на рисунке 4.
| Таблица
®’|^^’Лт|м<^ 1/20 ► w | ®
|
ХЪмм |
Х2,мм |
Х3,мм |
Х4 |
Х5 |
Y11 |
Y12 |
Y13 |
Y10 |
Y21 |
Y22 |
Y23 |
Y20 |
||
|
► |
3740 |
1680 |
1640 |
1 |
1 |
1 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
|
|
3740 |
1680 |
1640 |
2 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
||||
|
3740 |
1680 |
1640 |
1 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
||||
|
3740 |
1680 |
1640 |
1 |
0 |
1 |
0 |
0 |
0 |
0 |
0 |
0 |
|||
|
3740 |
1680 |
1640 |
1 |
5 |
0 |
1 |
0 |
0 |
0 |
0 |
0 |
0 |
||
|
3740 |
1680 |
1640 |
1 |
6 |
0 |
1 |
0 |
0 |
0 |
0 |
0 |
0 |
||
|
3740 |
1680 |
1640 |
1 |
7 |
0 |
0 |
1 |
0 |
0 |
0 |
0 |
0 |
||
|
3740 |
1680 |
1640 |
1 |
8 |
0 |
0 |
1 |
0 |
0 |
0 |
0 |
0 |
||
|
3740 |
1680 |
1640 |
1 |
9 |
0 |
0 |
1 |
0 |
0 |
0 |
0 |
0 |
||
|
3740 |
1680 |
1640 |
1 |
0 |
0 |
0 |
0 |
1 |
0 |
0 |
0 |
0 |
||
|
4145 |
1620 |
1446 |
2 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
||||
|
4145 |
1620 |
1446 |
2 |
2 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
|||
|
4145 |
1620 |
1446 |
2 |
з |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
|||
|
4145 |
1620 |
1446 |
2 |
4 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
|||
|
4145 |
1620 |
1446 |
2 |
5 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
|||
|
4145 |
1620 |
1446 |
2 |
6 |
0 |
0 |
0 |
0 |
0 |
1 |
0 |
0 |
||
|
4145 |
1620 |
1446 |
2 |
7 |
0 |
0 |
0 |
0 |
0 |
0 |
1 |
0 |
||
|
4145 |
1620 |
1446 |
2 |
8 |
0 |
0 |
0 |
0 |
0 |
0 |
1 |
0 |
||
|
4145 |
1620 |
1446 |
2 |
9 |
0 |
0 |
0 |
0 |
0 |
0 |
1 |
0 |
||
|
4145 |
1620 |
1446 |
2 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
1 |
||
Рисунок 4 – Данные в программе Deductor
В программе указали, что X1-X8 - входные параметры, а Y10-Y13 и Y20-Y23 - выходящие. Нейросеть в виде графа представлена на рисунке 5.
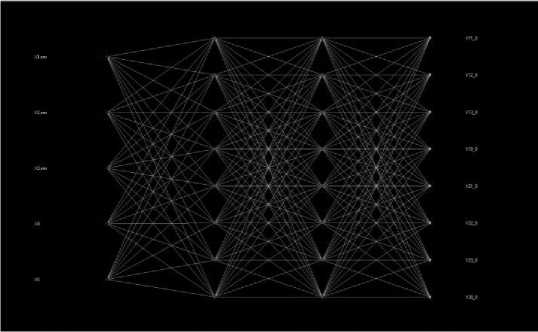
Рисунок 5 - Нейросеть 5 х 8 х 8 х 5
На основании рисунков 4, 5 можно сделать вывод, что результаты работы нейросети и параметров из обучающей выборки совпадали. Качество обучения нейросети представлено на рисунке 6.
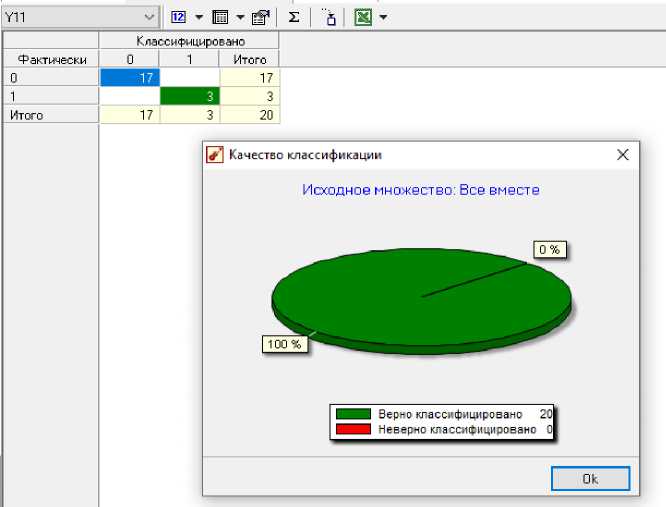
Рисунок 6 – Качество обучения
После оценки качества обучения нейронной сети в программе Deductor была проведена проверка работы сети по 1 варианту выборки (см. рис. 4), результаты проверки показаны на рисунке.
Входные параметры: X1=3740 мм. X2=1680 мм. X3=1640 мм. X4=1 X5=1.
На основании оценки результата распределения нейронная сеть дала верный ответ Y11, т. е. LADA 2121 имела «низкую» загрязненность (рис. 7).
ГраФ нейросети X Таблица сопряженности X Что-если X 3 ^ I н ^ 1 из 20 | ^^►►1(2ЙРЙ/
|
Поле |
Значение |
|
О ^] Входные |
|
|
! 9.0 Х1 .мм |
3740 |
|
9.0 Х2.мм |
1680 |
|
! । Э.ОХЗ.мм |
1640 |
|
9.0 Х4 |
1 |
|
9.0 Х5 |
1 |
|
В ^> Выходные |
|
|
9.0 Y11 |
1 |
|
, 9.0 Y12 |
0 |
|
9.0 Y13 |
0 |
|
I 9.0 Y10 |
0 |
|
9.0 Y21 |
0 |
|
9.0 Y22 |
0 |
|
, 9.0 Y23 |
0 |
|
9.0 Y20 |
0 |
Рисунок 7 – Результат работы по 1-му варианту
На основании представленных данных для применения нейронной сети в управлении портальной автомобильной мойки была сформулирована технология обучения. Обучающая выборка по моделям автомобилей, с которой должна работать портальная мойка, состоит из фотографий по моделям автомобилей. Фотографии размером 16 x 16 количеством не менее 1000 шт. в разных проекциях (сверху, снизу, справа, слева) и разной степени загрязнения (от высокой до чистого автомобиля) (рис. 8). Такие действия необходимы, чтобы нейронная сеть понимала, какой объем воды и давление необходимы, а также отличала чистый автомобиль от грязного. Для каждого конкретного случая требуется оптимальный расчет объема воды и давления.
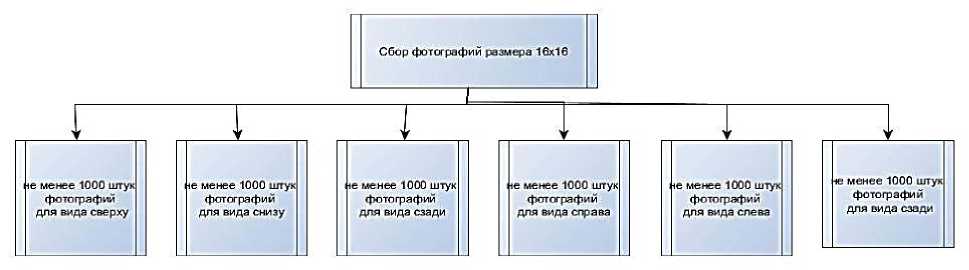
Рисунок 8 – Обучающая выборка по фотографиям
После обучения нейронной сети управлению процессами в портальной мойке необходимо было для постоянной фиксации состояния и формы автомобилей установить 6 камер. Далее задавалась управляющая программа с использованием нейронной сети, которая непосредственно влияет на все параметры процесса очистки.
На основании полученных данных был усовершенствован процесс очистки автомобилей на станции технического обслуживания. Этапы процесса мойки представлены на рисунке 9.
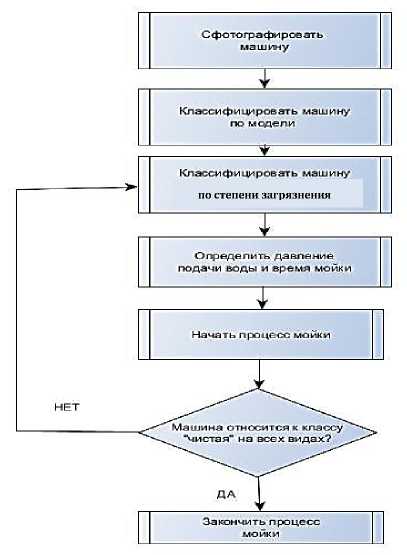
Рисунок 9 – Блок-схема алгоритма управления мойкой
По новой технологии в портальную мойку помещается автомобиль, при помощи установленных камер он фотографируется, далее используемая в программном управлении нейронная сеть классифицирует автомобиль, подает управляющий сигнал на исполнительные механизмы, которые регулируют объем воды, давление, количество моющих средств за необходимое время. При завершении цикла мойки автомобиль снова фотографируется и проводится его классификация по степени чистоты, если автомобиль классифицирован как чистый, то процесс мойки завершается. На рисунке 9 представлен алгоритм управления усовершенствованной мойкой с использованием нейросетевых технологий.
Заключение
Исходя из проведенных исследований по усовершенствованию процесса мойки с использованием нейросетевых технологий, можно сделать следующие выводы:
-
1. Обоснована необходимость совершенствования управления портальной мойкой, которая нуждается в применении новых алгоритмов управления для обоснованного расхода воды, электроэнергии и времени очистки.
-
2. В качестве инструмента алгоритма управления мойкой рассмотрены нейросетевые вычислительные модели. Они являются современным инструментом компьютерных технологий, которые можно применять при проведении уборочно-моечных работ на станциях технического обслуживания автомобилей и сервисных центрах предприятий АПК [13, 14].
-
3. Оценена возможность применения нейронных сетей для выполнения распределения и идентификации автомобилей на основе параметров, которые зафиксированы камерами на фотографиях. В качестве основных параметров выбраны форма кузова, размеры, марка автомобиля и степень загрязненности. Получена архитектура нейронной сети 5 х 8 х 8 х 8 с функцией активации – сигмовидная. Дальнейшие исследования данного вопроса могут ориентироваться на этот результат, так как вопрос «какую архитектуру и функцию активации необходимо выбрать» является первым при применении нейронных сетей.
-
4. Разработана технология обучения нейронной сети для управления портальной мойкой, которая заключается в создании обучающей выборки фотографий автомобилей с шести видов (слева, справа, спереди, сзади, сверху, снизу), и каждый вид также относится к определенному классу загрязнения, который определится при дальнейшем исследовании [15].
-
6. На основании технологии обучения нейронной сети для управления портальной мойкой получена блок-схема алгоритма управления портальной мойкой на основе нейронной сети.
