Сравнительный анализ эффективности проекционного метода нелокального улучшения управления

Автор: Бурлаков Иван Дмитриевич
Журнал: Вестник Бурятского государственного университета. Математика, информатика @vestnik-bsu-maths
Рубрика: Управляемые системы и методы оптимизации
Статья в выпуске: 1, 2015 года.
Бесплатный доступ
В статье рассматривается проекционный метод нелокального улучшения и приводится результат численного эксперимента по анализу эффективности этого метода в нелинейной задаче оптимального управления.
Задача оптимального управления, нелокальное улучшение, вычислительный эксперимент, сравнительный анализ, проекционный метод, функция понтрягина, численный метод
Короткий адрес: https://sciup.org/14835129
IDR: 14835129 | УДК: 517.977
Comparative analysis of the effectiveness of the projection method of nonlocal improvements of control
A projection method for nonlocal improvement and results of numerical experiment in effectiveness analysis of this method in the nonlinear optimal control problem is considered.
Текст научной статьи Сравнительный анализ эффективности проекционного метода нелокального улучшения управления
Приближенные методы решения задач оптимального управления продолжают развиваться по разным направлениям в работах многих исследователей (A.B. Аргучинцев, A.C. Булдаев, В.И. Гурман, В.А. Дыхта, В.И. Зубов, В.Б. Колмановский, В.Ф. Кротов, В.А. Срочко, А.И. Тятюшкин, Р.П. Федоренко, Ф.Л. Черноусько и другие). В частности, В. Ф. Кротов в работе [9] описал общий метод глобального улучшения управлений, близкий к так называемым нелокальным методам улучшения в дифференциальных системах, разрабатываемых в работах В. А. Срочко и А. С. Булдаева [2, 3, 4, 7].
Методы нелокального улучшения в отличие от локальных методов (например, метода условного градиента) не рассматривают операции слабого или игольчатого варьирования управления на каждой итерации с параметрическим поиском (который является довольно трудоемким) в достаточно малой окрестности улучшения. Основой методов нелокального улучшения в различных классах задач оптимального управления являются формулы приращения целевых функционалов без остаточных членов разложения. В результате последовательного решения задач улучшения управления генерируется релаксационная последовательность управлений, обладающая возможным свойством улучшать неоптимальные управления, удовлетворяющие принципу максимума, включая особые управления.
В статье проводится сравнительный анализ эффективности проекционного метода нелокального улучшения на тестовых задачах.
-
1. Постановка задачи
Рассматривается следующий класс задач оптимального управления:
x (t ) = f (x (t), u (t), t), x (t0 ) = x 0, u (t)g U, t g T = [t0,ti], t1
Ф(u) = ф(x(t)) +jF(x(t), u (t), t) dt ^ inf,(3)
t 0
где x ( t ) g R" - вектор состояния, u ( t ) g Rr - вектор управления. В качестве допустимых управлений рассматривается множество V кусочно-непрерывных на [ 1 0, t 1 ] функций со значениями в выпуклом компактном множестве U с Rr . Промежуток управления - [ 1 0, t 1 ] и начальное состояние x 0 заданы. Задача (1) - (3) является задачей оптимального управления со свободным правым концом.
Предполагаются выполненными следующие условия:
-
1) функция ф ( x ) непрерывно-дифференцируема на R ” , вектор-функция F ( x , u , t ) , f ( x , u , t ) и их производные Fx ( x , u , t ) , Fu ( x , u , t ) , fx ( x , u , t ) , f u ( x , u , t ) непрерывны по совокупности аргументов ( x , u , t ) на множестве R ” x U x T ;
-
2) функция f ( x , u , t ) удовлетворяет условию Липшица по x в
Rn х U х T с константой L > 0
|| f ( x , u , t ) - f ( y , u , t )|| < Lx - y ||.
Эти условия гарантируют существование и единственность решения x ( t , v ) , t e [ t 0, t 1 ] системы (1) - (2) для любого допустимого управления v ( t ) , t e [ t o , t i ] .
Решать поставленную задачу (1) - (3) будем при помощи модифицированного проекционного метода нелокального улучшения управлений с дифференциально-алгебраической сопряженной системой [2, 3, 4].
Сначала рассмотрим саму дифференциально-алгебраическую сопряженную систему [3, 4]:
p (t ) = -Hx (Р (t),x0 (t), u0 (t), t)-r (t), p (t1 ) = -Фx (x0 (t1))- q,
H ( p ( t ) , x ( t ) , u 0 ( t ) , t ) - H ( p ( t ) , x 0 ( t ) , u 0 ( t ) , t ) =
H Hx (p (t), x0 (t), u0 (t), t) + r (t), Ax (t )) ,(6)
ф( x (t1))-ф( x0 (t )) = ^p( (x0 (t1))+q,Ax (t1)}, где H (p, x, u, t ) = pp, f (x, u, t )^-F (x, u, t) - хорошо известная функция Понтрягина, Hx (p, x, u, t), фx (x (t1)) - производные соответствующих функций по x. u0 (t) e V - допустимое начальное значение управление, x0 (t) - решение уравнения (1) для этого начального управления, Ax (t) = x (t1) - x0 (t1).
Величины r ( t ) и q всегда можно выразить из соответствующих алгебраических уравнений (6) и (7) (возможно и не единственным образом) [3, 4] и, таким образом, система (4) - (5) всегда может быть сведена к вспомогательной дифференциальной сопряженной системе.
Следует заметить, что если в задаче (1) - (3) f , F линейны по x , то из [3, 4] следует, что r ( t ) = 0 , а если ф линейна, то q = 0 . В нелинейном случае, если в некоторый момент времени t e T x 0 ( t ) = x ( t ) , то полагаем r ( t ) = 0 . Если при этом t = t 1 , то q = 0 .
Далее для допустимого управления u е V и фиксированного параметра a > 0 рассмотрим проекционное отображение:
u a ( p , x , t ) = P u ( u ( t ) + a Hu ( p , x , u , t ) ) , t g [ t 0 , t 1 ] , где P U - оператор проектирования на множество U в евклидовой норме, H u ( p , x , u , t ) - производная функции Понтрягина по управлению.
Дифференциальный принцип максимума (ДПМ) в задаче (1) - (3) для управления u е V с помощью отображения u a представляется в виде:
u ( t ) = u a ( p ( t , u , v ) , x ( t , u ) , t ) , t g [ t 0 , t 1 ] , (8)
где p ( t , u , v ) - сопряженная переменная. Для выполнения ДПМ достаточно проверить условие (8) хотя бы для одного a > 0.
Для заданных a > 0 и u0 е V определим отображение wa с помощью соотношения wa (p,x,t,5) = Pu (u0 (t) + a(Hu (p,x,u0 (t),t) + 5(t))), t g[t0,ti] .
Параметр проектирования a > 0 рассматривается в качестве параметра возмущения . Уравнение (1) в данном случае примет вид:
x (t ) = f (x)(x (t), wa (p (t) , x (t), t, 5 (t)), t), x (10 ) = x0. (9) Итерационный процесс при фиксированном a > 0 и заданном u0 е V имеет вид uk+1 (t) = Pu (u0 (t) + aHu (pk (t),xk (t),uk,t) + 5(t)), t е [10,ti], где на начальной итерации (нулевой итерации) задается начальное приближение u0 е V. 5 (t) определяется из уравнения
H ( p ( t , u 0, uk ) , x ( t , uk ) , uk ( t ) , t ) -
- H ( p ( t , u 0, uk ) , x ( t , uk ) , u 0 ( t ) , t ) =
HHu ( p ( t , u 0, uk ) , x ( t , uk ) , u 0 ( t ) , t ) + 5 ( t ) , uk ( t ) - u 0 ( t )^, (10) xk ( t ) , pk ( t ) являются решениями системы (9) и дифференциальноалгебраической сопряженной системы (4) - (7) на k итерации, соответственно. В случае линейной по управлению задаче (1) - (3) 5 ( t ) = 0 , t е T . [3, 4].
Вычисляя 5 ( t ) , r ( t ) и q мы можем применить некоторые условия [5, 6]. Сначала опишем условия для нахождения 5 ( t ) :
-
1. Если все компоненты u k ( t ) = u 0 ( t ) , то алгебраическое уравнение (10) выполняется тождественно. В этом случае компоненты 5 ( t ) могут принимать произвольное значение, тогда, выбираем значения всех компонент 5 ( t ) , исходя из непрерывности, т.е. полагая равным значению 5 ( t ) в соседнем левом узле. При этом, если t = t 0 (начальный момент), то слева нет узла, а значит, выбираем любое значение, например 5 ( t 0 ) = 0 , для всех компонентов;
-
2. Если, хотя бы одна компонента вектора u k ( t ) * u 0 ( t ) , то именно для этой компоненты однозначно определяется соответствующая компонента 5 ( t ) из формулы (10), один из вариантов такого
определения:
Az HI ( p , X , u , t ) z . X Z X X
Sk ( t ) =——-----TT-- H^p^t , u °, uk ), x^t , uk ), u 0 ( t ) , t^ ,
A uk (t) v x x / где Au(t)H(p, x, u, t) = H(p (t, u0, uk), x(t, uk), uk (t), t)-
H(p(t,u0,uk),x(t,uk),u0 (t),t) и Auk (t) = uk (t)-u0 (t). Причем все остальные компоненты нужно положить равными по непрерывности значениям в левом соседнем узле. Но если при этом t = 10, то полагаем, что эти остальные элементы равны нулю.
Теперь покажем условия для определения r (t) и q. Но для начала перепишем дифференциально-алгебраическую сопряженную систему (4) - (7) в итерационном виде:
pk+1 (t) = -Hx (pk+1 (t),x0 (t),u0 (t),t)-r(t),(11)
pk+1 (t ) = -Фх (x 0 (t1))- q,
H ( pk ( t ) , xk ( t ) , u 0 ( t ) , t ) - H ( pk ( t ) , x 0 ( t ) , u 0 ( t ) , t ) =
H Hx (pk (t), x0 (t), u0 (t), t) + r (t), xk (t)- x0 (t )^,(13)
^(xk (t1))-^(x0 (t1 )) = (^x(x0(t1))+q,xk (t1)-x0 (t1)). (14)
где pk ( t ) = p ( t , u 0, uk ) , xk ( t ) = x ( t , uk )
Таким образом, вычисляя
r (t) и q из уравнений (11) - (14) необходимо учитывать следующие условия:
-
1. Если все компоненты xk ( t ) = x 0 ( t ) , то алгебраическое уравнение (13) выполняется тождественно. В этом случае компоненты r ( t ) могут принимать произвольное значение, тогда, выбираем значения всех компонент r ( t ) , исходя из непрерывности, т.е. полагая равным значению в соседнем правом узле. При этом, если t = t 1 (конечный момент), то справа нет узла, следовательно, выбираем любое значение, например r ( t 1 ) = 0 для всех компонентов. Также если в этот конечный момент выполняется xk ( t 1 ) = x 0 ( t 1 ) уравнение (14) обращается в тождество, поэтому задаем, например, q = 0 для всех компонентов;
-
2. Если, хотя бы одна компонента вектора xk ( t ) ^ x 0 ( t ) , соответствующая компонента r ( t ) однозначно определяется именно для этой компоненты из формулы (13), один из вариантов определения:
-
2. Вычислительный эксперимент
Az HI ( p, X, U, t) z . X Z X X rk (t)= a --Hx (p(t,u°,uk ),x(t,uk ),u0 (t),t),
Axk (t) x v x ’ ’
где A x ( t ) H ( p , x , u , t ) = H ( pk ( t ) , xk ( t ) , u 0 ( t ) , t ) -
H ( pk ( t ) , x 0 ( t ) , u 0 ( t ) , t ) и A xk ( t ) = xk ( t ) - x 0 ( t ) . Причем все остальные компоненты нужно положить равными по непрерывности значениям в правом соседнем узле. Но если при этом t = t , , то полагаем, что эти остальные компоненты равны нулю. Аналогичное, соответствует для q из уравнения (14).
Для сравнительного анализа рассматриваемого метода проведем вычислительный эксперимент. Вначале опишем общие параметры.
Вычисленные значения управляемых, фазовых и сопряженных переменных будем запоминать в узлах равномерной сетки с шагом дискретизации At = 10-3 на отрезке [10, t1 ]. В промежутках между соседними узлами сетки значение управления принимаем постоянным и равным значению управления в левом узле. Численный расчет задачи проводим до первого улучшения. Далее строим новую задачу, и повторяем итерационный алгоритм. В качестве критерия остановки выбираем условие
ф(uk+1 )-Ф(uk) - ф(uk ) 'е, где ^ > 0 - заданная точность (в примере е = 10-4). Эффективность методов также зависит и от алгоритмов, используемых для решения вспомогательных задач, например, интегрирование дифференциальных систем. По этой причине, численное решение фазовых и сопряженных задач Коши будем осуществлять методом Рунге-Кутта-Вернера пятого или шестого порядка точности с помощью библиотеки IMSL языка Fortran PowerStation 4.0 [1]. При вычислении 5 (t), r (t) и q принимаем условия, описанные выше, только внеся некоторое изменение: мы фиксируем один из r (t) равным нулю и проводим дальнейшее вычисление по обычным правилам. В качестве результата выбираем наилучшее решение
Пример 1. Оптимальная ориентация летательного аппарата в пространстве [8] .
-
x 1 ( t ) = x 3 , < x 2 ( t ) = X 4 , x 3 ( t ) = - x 4 + u 1 sin u 2 x 4 ( t ) = x 3 + u 1 cos u 2
x1 (0) = 10, x2 (0) = 0, x3 (0) = 10, x4 (0) = 0, t e[0, t1 ].
Ф ( u ) = t 1 + 1000 ^ x f ( t 1 ) ^ min.
i = 1
Проведем расчет с помощью проекционного метода нелокального улучшения и сравним с результатами, полученными в [8]. Для решения задачи введем необходимые конструкции.
Функция Понтрягина для заданной задачи записывается следующим образом:
H ( p , x , u , t ) = p 1 x 3 + p 2 x 4 +
+ p 3 ( u 1 sin u 2 - x 4 ) + p 4 ( x 3 + u 1 cos u 2 ) .
Градиенты:
H x , = 0 , H x 2 = 0, H x 3 = p 1 + p 4 , H x 4 = p 2 - p 3 ,
H u = p 3 sin u 2 + p 4 cos u 2 , H u = p 3 u 1 cos u 2 - p 4 u 1 sin u 2 .
Дифференциально-алгебраическая сопряженная система запишется в следующем виде:
p1 (t) = 0, p1 (t1) = -2000x1 (t1)- q1, p2 ( t) = 0, P2 ( t1 ) = -2000x2 ( t1 ) - q2, p3 ( t ) = -P1 - P4 , P3 ( t1 ) = -2000x3 ( t1 ) - q3, p3 ( t ) = — P2 + P3 , P3 ( t1 ) = -2000x3 ( t1 ) - q4.
В исходной задаче f , F линейны по x , значит r ( t ) = 0 , г = 1,4 . Для нахождения q используем формулу:
^W^ x lM 0
qk ' t) xk (t,)-x0 (t,) 9x (x ' t1'),
полученную из (14), вместе с правилами описанными выше.
Итерационный процесс при фиксированном a > 0 и заданном и 0 е V
U+1 (t) = Pu (и0 (t)+ aHu (P (t),xk (t),uk,t)+x(t)), t e[ t 0, t1 ] , где x (t) находится по правилу выше. В качестве начального приближения выбиралось управление и0 (t) = 0.
В таблице 1 приводятся результаты, полученные рассматриваемым методом (ПМНУ) и методами из работы [8] ( Ф * обозначает наилучшее значение функционала).
Таблица 1. Сравнительный анализ эффективности
|
Метод |
Ф |
Кол-во задач Коши |
|
1 |
10.285456 |
47422 |
|
2 |
10.288656 |
100048 |
|
ПМНУ |
10.290443 |
33907 |
Проекционный метод для данной задачи показал меньшую трудоемкость по количеству решенных задач Коши, хотя и уступил по точности решения. На следующих рисунках представлен рассчитанный оптимальный процесс (итоговые управление и фазовые траектории):
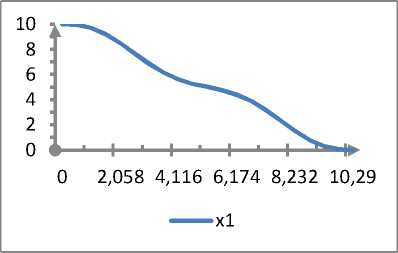
Рисунок 1. Фазовая траектория х 1 ( t )
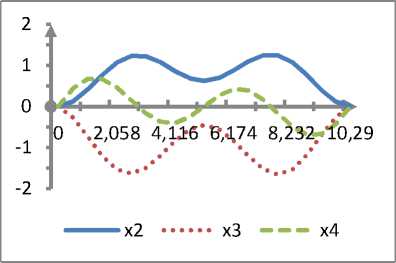
Рисунок 2 . Фазовая траектория x 2 ( t ) , x 3 ( t ) , x 4 ( t )
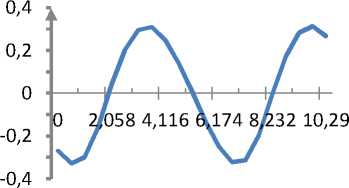
Рисунок 3. Управление u 2 ( t )
Итоговое управление u 1 ( t ) = 1 , t e [0, t 1 ] не представлено.
Пример 2. Оптимальное управление потоком хладагента в химическом реакторе [10, с. 405 - 407]
Рассматривается задача стабилизации химического реактора, представляющая собой аппарат с мешалкой и подведенным каналом поступления хладагента:
Ф( u )= J (x2 (t) + x 22 (t)) dt ^ inf, 0
x ( t ) = - 2 ( x 1 + 0.25 ) + ( x 2 + 0.5 ) e^2 - ( x 1 + 0.25 ) u , x 1 ( 0 ) = 0.05 , x 2 ( t ) = 0.5 - x 2 - ( x 2 + 0.5 ) ee^ x , x 2 ( 0 ) = 0 , x 1 ( 0.78 ) = 0 , x 2 ( 0.78 ) = 0 , u ( t ) e [ - 1,1 ] , t e [ 0,0.78 ] .
Функции x 1 ( t ) , x 2 ( t ) описывают соответственно отклонения температуры и концентрации. Управление u ( t ) характеризует поток хладагента, регулирующего необратимую экзотермическую реакцию.
В [10] Kirk D. E производит редукцию к задаче конечномерной оптимизации за счет дискретизации по функциям состояния и управления, замены производных конечными разностями по схеме Эйлера. Число моментов дискретизации не указано. В результате в [10] им были получены следующие результаты: x 1 ( 0.78 ) = - 6.167 х 10 - 6 , x 2 ( 0.78 ) = - 0.631 x 10 - 6 , Ф * ~ 0.00220 .
Приведем решаемую задачу к виду (1) - (3), т.е. со свободным правым концом, следуя методу штрафов, при достаточно большом фиксированном штрафном коэффициенте M > 0 :
Ф M = M (x12 (0.78) + x22 (0.78)) + x3 (0.78) ^ inf, x (t) = -2 (x1 + 0.25) + (x2 + 0.5) e^2 -(x1 + 0.25) u, x1 (0) = 0.05, x2 (t) = 0.5 -x2 -(x2 + 0.5) ё^, x2 (0) = 0, x3 (t) = x12 + x2, x3 (0) = 0 x1 (0.78) = 0, x2 (0.78) = 0, u (t)e[-1,1], t e[0,0.78].
Функция Понтрягина для данной образом:
задачи записывается следующим
H ( p , x , u , t ) =
25 x 1
= p 1 - 2 ( x 1 + 0.25 ) + ( x 2 + 0.5 ) e x + 2 - ( x 1 + 0.25 ) u
+
25 x 1
+ P 2 0.5 — x 2 — ( x 2 + 0.5 ) e 1 + 2
+ p 3 [ x + x 2 ] .
Градиенты:
, . 50 ( x 2 + 0.5 ) 1 x 2 7 X
Hx = ( P i - P 2) —---- "ГТ" e ' -( 2 + u ) P i + 2 P 3 x i -
(xi + 2)
,„ \ ( \ 1°° ( x 2 + °'5 ) (23 - x )
( H x i ) x ' =( P ' " P 2 )------(^------ e' + 2 P 3 -
H x , = ( P ' - P 2 ) - P 2 + 2 P 3 x 2 , ( H x 2 ), = 2 P 3 , H x 3 = 0 -
( H x 3 ) x = 0 - H u =- P i ( x + 0-25 ) -
Запишем получившуюся модифицированную сопряженную систему, вычислив r ( t ) и q по методу с условиями описанными выше:
, х 50 (x2 + 0.5),
А = ( P 2 - P i ) —7—е ' +( 2 + u ) P i - ( x i + 2 )
. L \50(x + 0.5)(23-x) 25x7) , ,
-
2p3xi - (Pi - p2)ex +2 + p3 y (t), ( (xi + 2)
P' (0.78) = -2Mx' (0.78) - My (0.78),
25 x 1
p 2 =( p 2- Pi) exi+2 + P 2 - 2 P 3x2 - P 3 У (t), p2 (0.78) = -2Mx2 (0.78) - My (0.78), p3 = 0, p3 (0.78) = -i.
где
y (t) = x (t, v)- x (t, u)
Будем решать с помощью проекционного метода нелокального улучшения (ПМНУ)
u*+1 (t) = P„ (u* (t) + aHu (pk (t),xk (t),uk (t),t)), t e T, где функции x* (t), pk (t) находятся в результате интегрирования фазовой и модифицированной сопряженной системы на текущем приближении. 5 (t ) = 0 так как задача линейна по управлению. В качестве начального приближения выбиралось управление u0 (t) = 1.
Проведем расчет ПМНУ для разных значений параметра a > 0 и штрафного коэффициента M > 0 . Наилучшее расчетное значение функционала Ф , вычисленное по методу ПМНУ, наблюдалось для параметров a = 0.13, M = 2 .
|
Значения a > 0 и M > 0 |
Значение Ф |
x 1(0.78) |
x 2(0.78) |
|
a = 0.13, M = 2 |
0.00200330 |
- 9.62 х 10 - 4 |
1.24 х 10 - 3 |
Для сравнения проведем расчет также стандартным методом проекции градиента (МПГ) при M = 2 , u 0 ( t ) = 1 , где в схеме параметрической оптимизации применим метод золотого сечения с погрешностью 10 - 3. Получаем следующий результат x 1 (0.78) = 8.79 хЮ- 4, x 2 (0.78) = 7.17 хЮ- 4, Ф * » 0.00200 .
Рассчитывая же методом условного градиента (МУГ), с аналогичной погрешностью параметрической оптимизации, приходим к следующим результатам x 1 (0.78) = - 5.77 х 10 - 4 , x 2 (0.78) = 2.07 х 10 - 3, Ф * ~ 0.00200 .
|
Метод |
Значение Ф |
x 1(0.78) |
x 2(0.78) |
|
МПГ |
0.00200084 |
8.79 х 10 — 4 |
7.17 х 10 — 4 |
|
МУГ |
0.00199673 |
- 5.77 х 10 - 4 |
2.07 х 10 - 3 |
Для более удобного анализа приведем все решения в одной таблице:
|
Таблица 2. Сравнительный анализ эффективности |
||||
|
Метод |
Значение ф |
x 1 (0.78) |
x 2 (0.78) |
Число задач Коши |
|
МПГ |
0.002000 |
8.79 х 10 - 4 |
7.17 Х 10 - 4 |
101 |
|
МУГ |
0.001997 |
- 5.77 х 10 - 4 |
2.07 х 10 - 3 |
96 |
|
ПМНУ |
0.002003 |
- 9.62 х 10 - 4 |
1.24 х 10 - 3 |
90 |
|
Методом Kirk D. E |
0.00220 |
- 6.16 х 10 6 |
- 0.63 х 10 - 6 |
-------- |
Скорость сходимости ПМНУ для различных значений M > 0 зависела от выбора значений параметра a > 0 . Например, для M = 2 сходимость наблюдалась при а е ( 0;0.4 ) , где при очень маленьких шагах скорость сходимости была медленной. Лучшая скорость по количеству решенных задач Коши наблюдалась для а е ( 0.10;0.14 ) . При увеличении штрафного параметра, приходилось уменьшать а . При этом скорость сходимости также падала.
На следующих рисунках представлен расчетный оптимальный процесс (итоговое управление u ( t ) и фазовые траектории x 1 ( t ) , x 2( t ) ):
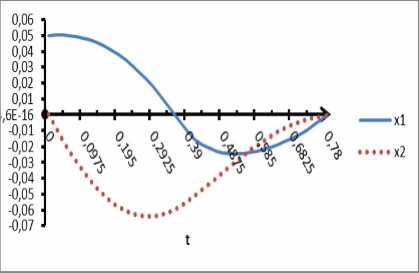
Рисунок 4 . Фазовые траектории
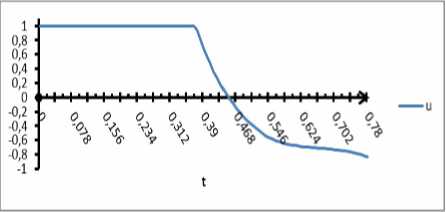
Рисунок 5 . Управление
Заключение
В рамках рассматриваемых расчетных задач рассматриваемый проекционный метод нелокального улучшения управления в целом показал лучшую эффективность по количеству расчетных задач Коши по сравнению с градиентными процедурами и другими методами, при приемлемой точности решения. При этом, в отличие от градиентных методов, требующих трудоемкую настройку процедур локального варьирования управления, настройка сходимости нелокального проекционного метода осуществляется только выбором одного настроечного параметра a > 0 .
Список литературы Сравнительный анализ эффективности проекционного метода нелокального улучшения управления
- Бартеньев О. В. Фортран для профессионалов. Математическая библиотека IMSL. Часть 3//О. В. Бартеньев. -Москва: Диалог-МИФИ, 2001.-368 с.
- Булдаев А. С. Методы возмущений в задачах улучшения и оптимизации управляемых систем/А. С. Булдаев. -Улан-Удэ: Издательство Бурятского госуниверситета, 2008. -260 с.
- Булдаев А. С. Модификация метода проекций для улучшения нелинейных управленй/А. С. Булдаев, О. В. Моржин//Вестник Бурятского госуниверситета. -2010. -Вып. 9: Математика, информатика. -С. 10-17.
- Булдаев А. С. Улучшения управлений в нелинейных системах на основе краевых задач/А. С. Булдаев, О. В. Моржин//Известия Иркутского госуниверситета. Серия «Математика». -2009. -Т. 2, № 1. -С. 94-106.
- Булдаев А. С. Условия улучшения и оптимальности в задачах оптимизации нелинейных управляемых систем/А. С. Булдаев, Г. Анхбаяр//Вестник Бурятского госуниверситета. -2014. -Вып. 9(2): Математика, информатикаю. -С. 3 -9.
- Бурлаков И. Д. Анализ эффективности метода нелокального улучшения в задачах оптимального управления/И. Д. Бурлаков//Вестник Бурятского госуниверситета. -2014. -Вып. 9(2): Математика, информатика. -С. 10-19.
- Срочко В. А. Итерационные методы решения задач оптимального управления/В. А. Срочко. -Москва: Наука, 2000. -160 с.
- Горнов А. Ю. Вычислительные технологии решения задач оптимального управления/А. Ю. Горнов -Новосибирск: Наука, 2005. -279 с.
- Krotov V. F. Global methods in optimal control theory/V. F. Krotov. -New York: Marcel Dekker, 1996. -408 p.
- Kirk D. Е. Optimal control theory. An introduction/D. E. Kirk. -New York: Dover Publ., 2004. -472 p.
