Сравнительный анализ репозиционных возможностей чрескостных аппаратов, работающих на основе компьютерной навигации и аппарата Илизарова

Автор: Соломин Л.Н., Виленский В.А., Утехин А.И., Террел В.
Журнал: Гений ортопедии @geniy-ortopedii
Рубрика: Оригинальные статьи
Статья в выпуске: 1, 2009 года.
Бесплатный доступ
Сравнили репозиционные возможности аппаратов работающих на основе пассивной компьютерной навигации -гексаподов (SUV-Frame, Taylor Spatial Frame, Ilizarov Hexapod Apparatus,) и аппарата Илизарова. Проанализированы возможности репозиции костных фрагментов в данных аппаратах в трех стандартных плоскостях и в шести степенях свободы. Выполнено 48 серий экспериментов. Выявлено, что среди аппаратов со свойствами пассивной компьютерной навигации наилучшие возможности по дистракции, плоскопараллельному, угловому перемещению костных фрагментов и ротации обеспечивает конструкция SUV-Frame. Совокупно аппарат Илизарова обеспечивает лучшие показатели перемещения костных фрагментов в сравнении с гексаподами, однако для коррекции каждого компонента деформации необходим монтаж специального унифицированного узла.
Чрескостный остеосинтез, компьютерная навигация, гексаподы, репозиция
Короткий адрес: https://sciup.org/142121176
IDR: 142121176 | УДК: 616.71-001.5-089.84:004.9
The comparative analysis of the reposition potentials of transosseous devices operating on the basis of computer navigation and the Ilizarov fixator
The aim of the study was to compare the reduction potentials of devices, which operate on the basis of passive computer navigation - hexapods (SUV-Frame, Taylor Spatial Frame, Ilizarov Hexapod Apparatus), and the Ilizarov fixator. The potentials of bone fragment reposition have been analyzed in the devices mentioned for three standard planes and for six degrees of freedom. 48 series of experiment have been performed. It has been revealed that among the devices with passive computer navigation characteristics SUV-Frame construction affords the best potentials as regards distraction, translation, angulation of bone fragments and rotation. In the aggregate, the Ilizarov fixator provides the best qualities of bone fragment movement in comparison with hexapods, however, mounting a special unified unit is necessary to correct every component of deformity.
Текст научной статьи Сравнительный анализ репозиционных возможностей чрескостных аппаратов, работающих на основе компьютерной навигации и аппарата Илизарова
За время, прошедшее с момента изобретения в 1952 году, аппарат Илизарова получил мировое признание и стал традиционным в лечении переломов и деформаций длинных трубчатых костей [2, 4, 6, 7]. 1 Благодаря универсальности узлов и деталей, в данном аппарате возможно устранить любой вариант смещения костных фрагментов [4, 6, 7]. Однако для устранения каждого из компонентов деформации (ангуляция, ротация, смещение фрагментов по длине и по периферии) в аппарате Илизарова требуется замена унифицированных узлов [4]. При коррекции сложных многоплоскостных многокомпонентных деформаций необходимо выполнить от трех и более перемонтажей аппарата, что требует дополнительных времени и трудозатрат [5].
С середины 90-х годов в мировой ортопедии появились новые аппараты для чрескост-ного остеосинтеза, которые обозначаются единым термином: аппараты со свойствами пассивной компьютерной навигации или гексаподы [9, 10]. Это аппарат Taylor Spatial Frame (TSF) производства США [8, 9, 11], Ilizarov Hexapod Apparatus (IHA) производства Герма- нии [10] и SUV-Frame, разработанный в России [12]. В данных аппаратах два чрескостных модуля, фиксирующих проксимальный и дистальный костный фрагменты, соединены между собой шестью стратами (аналоги соединительных стержней в аппарате Илизарова) (рис. 1). Изменение длин страт приводит к взаимному перемещению опор в трех плоскостях и соответственно закрепленных в них костных фрагментов. Поэтому устройство гексапода позволяет одноэтапно устранить многокомпонентную многоплоскостную деформацию. Ра- бота гексаподов невозможна без прилагающихся к ним программ компьютерной навигации. Благодаря программе, коррекция деформации, устранение смещения костных фрагментов (при переломах) в гексаподе являются математически точными и не требуют многократных перемонтажей аппарата [8, 9, 10, 11].
Вместе с тем, до настоящего времени не сравнены репозиционные возможности аппарата Илизарова и гексаподов. Целью настоящего исследования было установить, у какого из исследуемых аппаратов репозиционные возможности лучше.
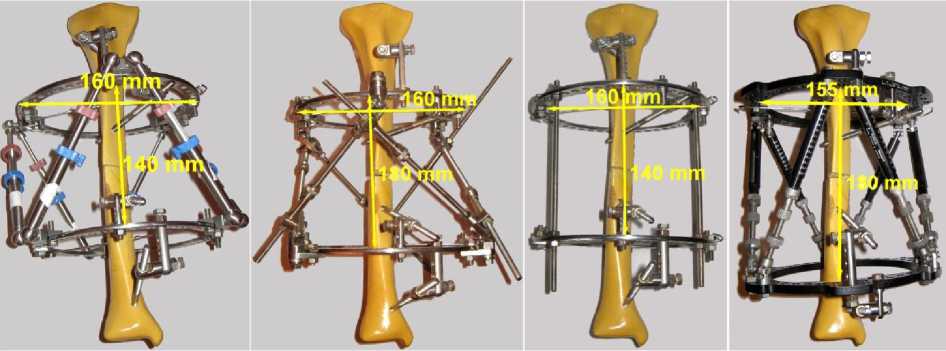
а б в г
Рис. 1. Модели аппаратов: а – IHA; б – SUV-Frame; в – аппарат Илизарова; г - TSF
МАТЕРИАЛЫ И МЕТОДЫ ИССЛЕДОВАНИЯ
В данном эксперименте сравнивались аппараты (рис. 1) с одинаковым расположением чре-скостных элементов. Согласно методу унифицированного обозначения чрескостного остеосинтеза (МУОЧО) [3] компоновку каждого из исследуемых аппаратов (аппарат Илизарова, SUV-Frame и IHA) можно обозначить следующей схемой:
ПД2Д10;Ш,9-3;1У,2,70 УД2Д 10;У1,3-9;УП,2,70 —— .
160 160
Так как в комплекте TSF отсутствуют опоры диаметром 160 мм, для сборки моделей использовались опоры диаметром 155 мм (рис. 1, г):
11Д 2 Д10; 111, 9—3; 1 V,2,70 V,12,110;VI,3-9;VII,2,70 —— .
155 155
Исходное расстояние между опорами у моделей остеосинтеза IHA (140 мм) обусловлено средней длиной каждой из страт. В стандартном наборе аппарата TSF имеется 3 типоразмера страт. Базовые модели собирали, используя среднюю длину среднего типоразмера страт, что обусловило расстояние между опорами 180 мм.
Кроме репозиционных возможностей, обеспечиваемых использованием среднего типоразмера страт, у TSF определяли возможности репозиции при использовании всех типоразмеров страт. В аппарате Илизарова исходное расстояние между опорами равнялось 140 мм, а в аппа-
рате SUV-Frame – 180 мм.
Собирали по три каждой из исследуемых моделей. В качестве костных фрагментов использовали пластиковые макеты большеберцовой кости. При центровке аппаратов имитаторы кости располагали в центре опор.
Исследовались возможности аппаратов TSF, IHA, SUV-Frame и аппарата Илизарова в следующих номинациях:
-
1) максимальное перемещение костных фрагментов по оси (дистракция) (рис. 2);
-
2) максимальное плоскопараллельное перемещение костных фрагментов по ширине во фронтальной плоскости (смещение кнут-ри/кнаружи) (рис. 3) и в сагиттальной плоскости (смещение кпереди/кзади);
-
3) максимальное угловое перемещение костных фрагментов во фронтальной плоскости (варус/вальгус) (рис. 4) и в сагиттальной плоскости (антекурвация/рекурвация);
-
4) максимальное ротационное перемещение костных фрагментов (внутренняя/наружная ротация) (рис. 5).
Измерения в каждом случае проводили троекратно для получения статистически достоверных результатов. Всего проанализировано 48 серий экспериментов.
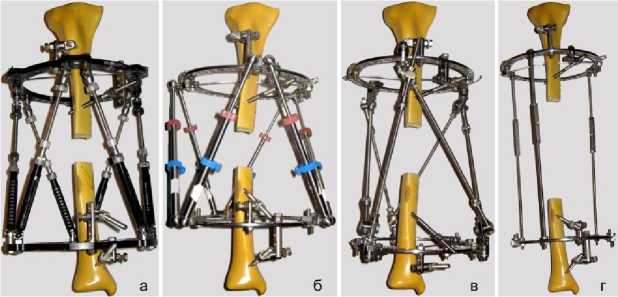
Рис. 2. Перемещения костных фрагментов по длине: а – аппаратом TSF (при среднем типоразмере страт); б – аппаратом IHA; в – аппаратом SUV-Frame; г – аппаратом Илизарова
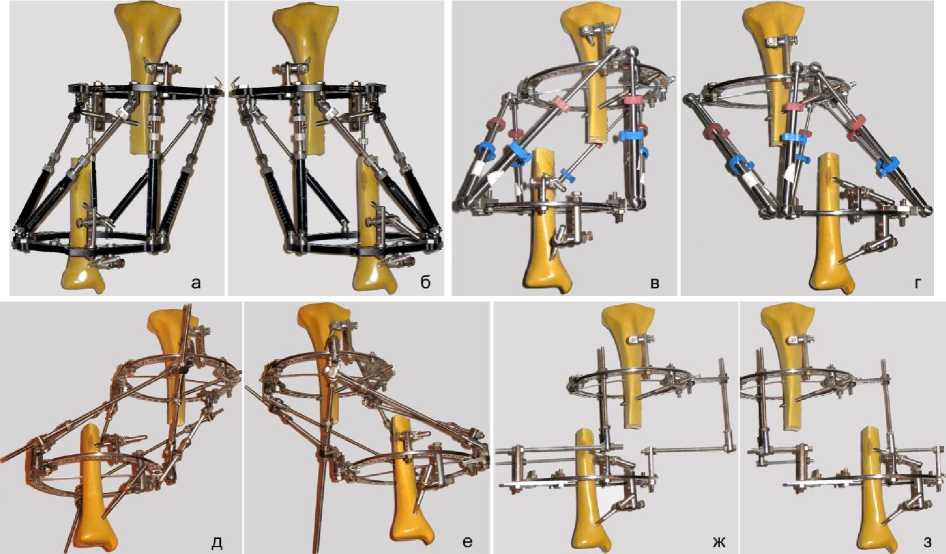
Рис. 3. Перемещения костных фрагментов по ширине во фронтальной плоскости: а, б – аппаратом TSF; в, г – аппаратом IHA; д, е – аппаратом SUV-Frame; ж, з – аппаратом Илизарова

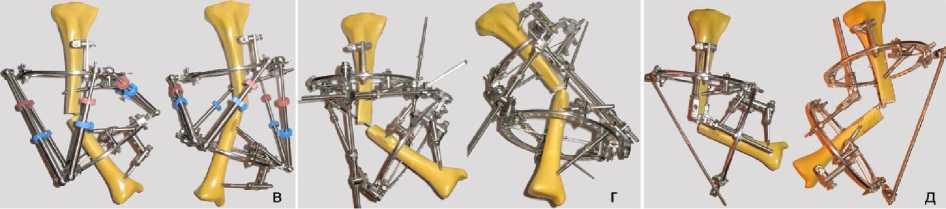
Рис. 4. Угловые перемещения костных фрагментов во фронтальной плоскости: а – аппаратом TSF (средние длины страт); б – аппаратом TSF (весь диапазон длин страт); в – аппаратом IHA; г – аппаратом SUV-Frame; д – аппаратом Илизарова


Рис. 5. Ротационные перемещения костных фрагментов: а – аппаратом TSF (средние длины страт); б – аппаратом TSF (весь диапазон длин страт); в – аппаратом IHA; г – аппаратом SUV-Frame; д – аппаратом Илизарова
РЕЗУЛЬТАТЫ И ИХ ОБСУЖДЕНИЕ
При исследовании аппаратов были получены следующие результаты.
Перемещение костных фрагментов по оси.
В аппарате TSF при использовании только средних страт максимальное перемещение костных фрагментов относительно друг друга составляет 40 мм. При использовании всего диапазона длин страт – 170 мм.
В аппарате IHA максимальное перемещение костных фрагментов по длине составляет 70 мм.
В аппарате SUV-Frame и аппарате Илизарова можно использовать резьбовые стержни любой длины. Поэтому возможности дистракции в этих аппаратах теоретически не ограничены.
Перемещения костных фрагментов по ширине.
В аппарате TSF при использовании только средних страт максимальное перемещение костных фрагментов относительно друг друга по ширине составляет: кнутри - 75 мм, кнаружи – 70 мм, кпереди – 70 мм, кзади – 75 мм. При использовании всего диапазона длин страт: кнутри - 200 мм, кнаружи – 190 мм, кпереди – 190 мм, кзади – 200 мм.
В аппарате IHA максимальное перемещение костных фрагментов по ширине составляет: кнутри - 70 мм, кнаружи – 75 мм, кпереди – 72 мм, кзади – 76 мм.
В аппарате SUV-Frame и аппарате Илизарова можно использовать резьбовые стержни любой длины. Поэтому плоскопараллельное перемещение фрагментов относительно друг друга в этих конструкциях теоретически не ограничено.
Угловые перемещения костных фрагментов.
В аппарате TSF при использовании только средних страт максимальное угловое перемещение костных фрагментов относительно друг друга составляет: варусное – 24º, вальгусное – 25º, антекурвация – 35º, рекурвация – 31º При использовании всего диапазона длин страт: ва-русное – 40º, вальгусное – 42º, антекурвация – 37º, рекурвация – 37º
В аппарате IHA максимальное угловое перемещение костных фрагментов составляет: варусное – 32º, вальгусное – 38º, антекурвация – 40º, рекурвация – 30º
В аппарате SUV-Frame максимальное угловое перемещение костных фрагментов составляет: варусное – 50º, вальгусное – 48º, антекурва-ция – 42º, рекурвация – 43º.
В аппарате Илизарова максимальное угловое перемещение костных фрагментов составляет: варусное – 65º, вальгусное – 65º, антекурва-ция – 72º, рекурвация – 68º
Ротационные перемещения костных фрагментов.
В аппарате TSF при использовании только средних страт максимальное ротационное перемещение костных фрагментов относительно друг друга составляет: кнаружи – 20º, кнутри – 20º. При использовании всего диапазона длин страт: кнаружи – 75º, кнутри – 69º.
В аппарате IHA максимальное ротационное перемещение костных фрагментов составляет: кнаружи – 42º, кнутри – 38º.
В аппарате SUV-Frame максимальное рота-
Репозиционные возможности гексаподов и аппарата Илизарова
Таблица 1
В аппарате Илизарова максимальное ротационное перемещение костных фрагментов без переустановки унифицированного ротирующего узла составляет 28º. При многократной переустановке ротирующего узла возможности устранения ротационной деформации аппаратом Илизарова становятся, теоретически, неограниченными. В частности, для поворота костного фрагмента на 90º требуется 3 переустановки узла; для поворота 180º - 6 переустановок; для поворота 270º - 10 переустановок.
Так как по условиям эксперимента имитаторы кости располагали в центре опор, это позволило при ротации избежать вторичного смещения фрагментов по ширине [3].
Полученные в ходе эксперимента результаты обобщены в таблице 1 и диаграмме (рис. 6).
Анализ таблицы и диаграмм позволяет утверждать следующее. Лучшие результаты при смещении костных фрагментов по длине и по периферии обеспечивают SUV-Frame и аппарат Илизарова. Максимальная угловая коррекция может быть обеспечена аппаратом Илизарова. Среди аппаратов со свойствами пассивной компьютерной навигации лучшие результаты при коррекции углового компонента деформации получены при тестировании SUV-Frame. Максимальные цифры при коррекции ротационных деформаций достижимы в аппарате Илизарова, но при условии неоднократной переустановки ротирующего узла. Среди гексаподов в этой номинации лучшие результаты достигнуты при использовании SUV-Frame.
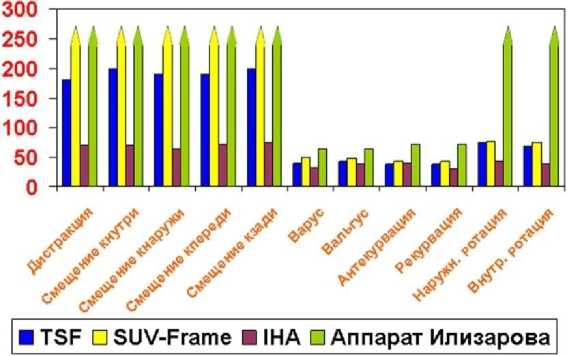
Рис. 6. Диаграммы максимально возможных величин перемещения костных фрагментов
ВЫВОДЫ
-
1. Среди аппаратов со свойствами пассивной компьютерной навигации наилучшие возможности при дистракции, плоскопараллельному, угловому перемещению костных фрагментов и ротации обеспечивает конструкция SUV-Frame.
-
2. Аппарат Илизарова обеспечивает лучшие
показатели перемещения костных фрагментов в сравнении с гексаподами, однако для коррекции каждого компонента деформации необходим монтаж специального унифицированного узла, что усложняет использование этой конструкции.
