Теоретическое и экспериментальное исследование производительности зубчатого бункерного загрузочно-ориентирующего устройства для асимметричных деталей тел вращения

Автор: Васин С.А., Шевченко С.Н., Пантюхина Е.В., Лукин С.А.
Журнал: Известия Самарского научного центра Российской академии наук @izvestiya-ssc
Рубрика: Машиностроение и машиноведение
Статья в выпуске: 1 т.26, 2024 года.
Бесплатный доступ
В статье приводятся результаты теоретического и экспериментального исследования производительности механического дискового зубчатого бункерного загрузочно-ориентирующего устройства с кольцевым ориентатором для асимметричных деталей тел вращения. Для теоретического описания производительности представлена математическая модель вероятности захвата асимметричных деталей с торцом в форме усеченного конуса, с помощью которой становится возможным определение фактической производительности загрузочно-ориентирующего устройства и оценка влияния на нее геометрических параметров деталей, конструктивных и кинематических параметров бункерного загрузочно-ориентирующего устройства. С помощью разработанной математической модели были определены параметры бункерного загрузочно-ориентирующего устройства, при которых его производительность будет максимальной. Для подтверждения адекватности и корректности разработанной математической модели вероятности захвата для описания производительности представлены результаты экспериментальных исследований на макете загрузочного устройства для двух типоразмеров асимметричных деталей с торцом в форме усеченного конуса. Сравнительный анализ теоретических значений фактической производительности загрузочно-ориентирующего устройства с экспериментальными показал их высокую сходимость, что подтверждает целесообразность использования предлагаемой концепции при оценке производительности механических дисковых бункерных загрузочно-ориентирующих устройств для асимметричных деталей тел вращения.
Бункерное загрузочно-ориентирующее устройство, производительность, вероятность захвата, ориентирование асимметричных деталей тел вращения
Короткий адрес: https://sciup.org/148328449
IDR: 148328449 | УДК: 621.9.06 | DOI: 10.37313/1990-5378-2024-26-1-63-69
Theoretical and experimental study of capacity of toothed hopper feeding-orienting device for asymmetric parts of rotation bodies
The article presents the results of a theoretical and experimental study of the performance of a mechanical disk gear hopper feeding-orienting device with an annular orientator for asymmetric parts of rotation bodies. For theoretical description of productivity, mathematical model of probability of gripping asymmetric parts with end face in form of truncated cone is presented, with the help of which it becomes possible to determine actual productivity of feeding-orienting device and estimate of influence on it of geometric parameters of parts, structural and kinematic parameters of hopper feeding-orienting device. Using the developed mathematical model, the parameters of the bunker feeding-orienting device were determined, at which its feed rate would be maximum. To confirm the adequacy and correctness of the developed mathematical model of capture probability to describe the feed rate, the results of experimental studies on the layout of the feeding device for two types of asymmetric parts with a truncated cone end are presented. Comparative analysis of the theoretical values of the actual feed rate of the feeding-oriented device with experimental ones showed their high convergence, which confirms the feasibility of using the proposed concept in assessing the feed rate of mechanical disk hopper feeding-oriented devices for asymmetric parts of rotation bodies.
Текст научной статьи Теоретическое и экспериментальное исследование производительности зубчатого бункерного загрузочно-ориентирующего устройства для асимметричных деталей тел вращения
Автоматическую загрузку современного оборудования для сборки изделий должны осуществлять надежные системы, основным устройством которых является бункерное за-грузочно-ориентирующее устройство (БЗУ). Так как в последние десятилетия в различных отраслях промышленности стали появляться различные детали тел вращения с асимметрией внешней и внутренней формы, в том числе и с неявной асимметрией, возникает необходимость проектирования в кратчайшие сроки оптимальных по всем параметрам БЗУ для широкой номенклатуры асимметричных деталей
[1]. Учитывая вероятностный принцип работы и возможность функционирования только БЗУ для конкретной детали с определёнными геометрическими параметрами, значительно усложняющие проектирование БЗУ, требуется решение сложных многоуровневых задач, важнейшей из которых является определение производительности, а именно вероятности захвата деталей в БЗУ [2].
В работах [3, 4] была представлена новая методологическая концепция, позволяющая определить вероятность захвата широкой номенклатуры деталей тел вращения с неявной и явной асимметрией, и построить математические модели производительности БЗУ, реализующих различные способы захвата и ориентирования.
Производительность механического дискового БЗУ (шт./мин) и вероятность захвата η в нем деталей в зависимости от окружной скорости υ захватывающих органов БЗУ описываются соответственно выражениями
П = 60 и П и П = П тах (1 -еи 4), (1)
где t – шаг захватывающих органов (карманов),
м; и - окружная скорость захватывающих органов, м/с; n max — максимальное значение вероятности захвата, соответствующее окружным скоростям захватывающих органов, близких к нулю, и представляющее собой произведение вероятности pi нахождения детали по направлению к карману в положении, благоприятном для захвата, и вероятности pc того, что захвату не помешает взаимосцепляемость деталей; е = и- ред - коэффициент, определяемый предельным значением окружной скорости захватывающих органов и П р ед , при которой движущимся карманом не сможет захватиться ни одна деталь [5].
Таким образом, при построении математических моделей определяются вероятности нахождения деталей в благоприятном для их захвата положении при различных способах ориентирования, реализуемых в БЗУ, вероятности отсутствия помех из-за взаимосцепляе-мости деталей, предельной окружной скорости захватывающих органов по захвату.
ПОСТРОЕНИЕ МАТЕМАТИЧЕСКОЙ МОДЕЛИ ПРОИЗВОДИТЕЛЬНОСТИ
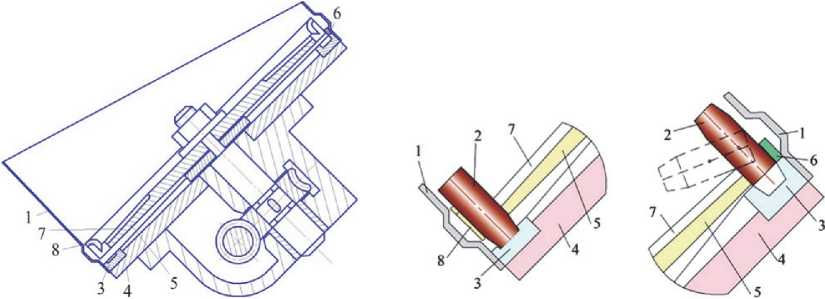
Рассмотрим применение представленной концепции для построения математической модели вероятности захвата асимметричных деталей с торцом в форме усеченного конуса в зубчатом БЗУ с кольцевым ориентатором [6], представленном на рис. 1 (1 – стенка бункера; 2 – деталь; 3 – кольцевой ориентатор; 4 – основание; 5 – вращающийся диск; 6 – криволинейный копир; 7 – радиальный паз; 8 – зубья).
С учетом конструктивных особенностей БЗУ указанного типа и захвата в нем деталей определим последовательно коэффициенты, определяющие вероятность захвата. В рассматриваемом БЗУ захват деталей осуществляется радиально расположенными карманами. Деталь с торцом в виде усеченного конуса для захвата должна
упасть на поверхность вращающегося диска основанием II (наименьший по диаметру торец детали), из которого не требуется поворот к карману, так как деталь в этой плоскости симметрична, или стороной III, при нахождении на которой необходим поворот к карману основанием II.
Вероятности p i , p ц, p щ с использованием заменяющих коэффициентов a = d 1 /I , c = d 2 ll, b = xc/l, f = l i pl (где d i и d 2 -диаметры наибольшего и наименьшего торцов детали, l – длина детали, l 1 – длина цилиндрического торца, xc – координата центра масс от наибольшего по диаметру основания, м) получим в следующем виде
1 - cosO,5 8 i
1 - cosO,5 8 tt p 11 =------------- , p ill =1 - p I- p 11 ,
где 8 1 = 2arccos

8 ii = 2arccos—

1 =
c
2(1 - b )
В рассматриваемом БЗУ, в котором реализовано пассивное ориентирование деталей, нахо-
дим вероятности
, Pn I ( Ц )
Pima x = P II + ,I 8 II - 2arcsln I , 2 п I a )
P i min = P II + p ii arcsin
V
d 1 + A
1 1 + d 2
+ dx
- ar«g -
где ц - коэффициент трения между деталями и элементами БЗУ; а - угол наклона вращающегося диска, град; А - зазор между деталью и стенкой кармана.
а б в
Рис. 1. Схемы усовершенствованного зубчатого БЗУ в разрезе (а),
а также захвата (б) и ориентирования (в) деталей
Далее определяется вероятность pi по выражению nR Ф 3
p i - 1 - (1 - P i max )3(1 - P i min )180 d 1, (4)
где R – радиус вращающегося диска по осям карманов, м; ф з - зона захвата деталей, град.
Вероятность pc определим по выражению:
p c = 1 -
arctan ц о з72 •П d 2 + d 2 + 4 d 171)
d 2 • (1,5V2" + 1) + d 2 • (1,572 + 1) + 8 d 1 1 1 , (5)
в котором Ц о - коэффициент трения между деталями.
Расчетная схема для определения и п р ед представлена на рис. 2.
В БЗУ с захватом деталей закатыванием в радиальные карманы с поверхности зубьев на вращающемся диске при прохождении пути s , необходимого для захвата на глубину Ah = 0,5d1 (см. рис. 2), получено ипред d 1
0,5 y + 1 + А 1 -
1 1
2 y + y 2 + 1
g sin a
’(6
где h 3 - yd 1 и A = A 1 d 1 , а h 3 - толщина зубьев, м.
Математическая модель фактической производительности механического дискового зубчатого БЗУ для деталей с торцом в виде усеченного конуса представлена выражениями (1) – (6). Компьютерное моделирование производительности реализовано в среде MathCad при следующих параметрах БЗУ и деталей: радиус вращающегося диска R = 0,2 м, коэффициент трения между деталями Цо = 0,3, высота зубьев h3 -1,5d 1, длина детали l — 0,03 м.
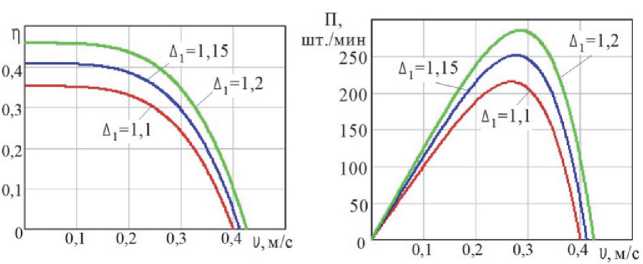
Результаты компьютерного моделирования для полых деталей с торцом в виде усеченного конуса представлены на рис. 3 при различных значениях коэффициента A j , характеризующего зазор между стенкой кармана и деталью, при коэффициентах a = 1/3 , b = 1/4 , коэффициенте трения ц = 0,4 и угле a — 45 ° . Вероятность захвата достигает своих максимальных значений при окружных скоростях вращающегося диска от 0 до 0,16 м/с. Максимальная производительность БЗУ достигает своих максимальных значений при и — 0,27...0,29 м/с и в зависимости от A 1 составляет от 215 до 285 шт./мин.
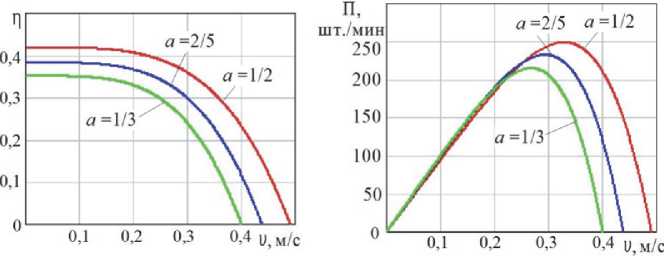
Влияние на вероятность захвата и производительность БЗУ соотношения диаметров торцов к общей длине детали, характеризуемых коэффициентами a и c, показано на рис. 4 при ц = 0,4, a — 45 ° и A 1 = 0,1.
Вероятность захвата деталей достигает максимальных значений при окружных скоростях вращающегося диска от 0 до 0,2 м/с и составляет при a = 1/2, (c = 1/3) – от 0,41 до 0,42;
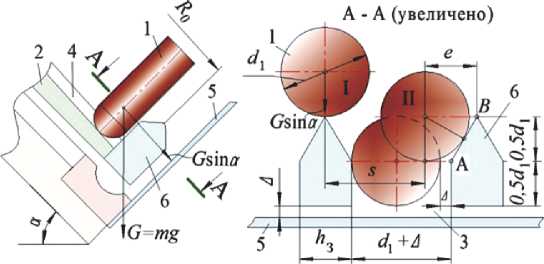
Рис. 2. Расчетная схема к нахождению окружной скорости и п р е д при захвате деталей:
1 - деталь; 2 - вращающийся диск; 3 - карман; 4 - радиальный паз; 5 - обечайка; 6 - зубья
а
б
Рис. 3. Графики зависимости вероятности захвата (а) и производительности (б) БЗУ от окружной скорости захватывающих органов и коэффициента зазора А 1
а б
Рис. 4. Графики зависимости вероятности захвата (а) и производительности (б) БЗУ от окружной скорости захватывающих органов и соотношений диаметров торцов к общей длине детали
при a = 2/5, (c = 2/7) – от 0,375 до 0,39 и при a = 1/3, (c = 1/4) – от 0,33 до 0,36. Максимальная производительность БЗУ составляет от 215 до 248 шт./мин.
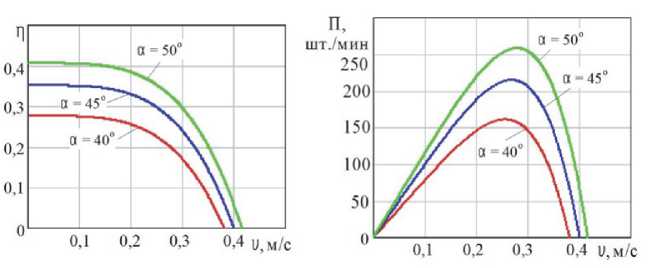
Влияние на вероятность захвата и производительность БЗУ угла наклона бункера показано на рис. 5. Вероятность захвата достигает максимальных значений при окружных скоростях от 0 до 0,2 м/с и в зависимости от угла составляет от 0,255 до 0,41. Максимальная производительность БЗУ при а = 40 o и и = 0,28 м/с составляет 157 шт./мин; при а = 45 o и и = 0,27 м/с - 215 шт./ мин, при а = 50 o и и = 0,25 м/с - 252 шт./мин.
Таким образом, вероятность захвата при увеличении зазора на 4...5 % повышается в среднем на 12...19 %, что приводит к возрастанию производительности на 7...17 %. При увеличении соотношения l / d i вероятность захвата и производительность БЗУ уменьшаются. Например, при соотношении параметров детали l / d i = 3 производительность уменьшается на 13,3...33,6 % по сравнению с производительностью при загрузке деталей с l / d 1 = 2 . Чем больше угол наклона вращающегося диска, тем выше производительность; так, при увеличении угла наклона на 5 ° производительность БЗУ повышается на 17,2...36,9 %.
Вероятность захвата и производительность БЗУ при увеличении коэффициента трения существенно снижаются. Сравнение производительности БЗУ при значениях коэффициента трения 0,2 и 0,5 показало, что при а = 40o производительность снизилась на 81,9 %, при а = 45 o - на 60,1 % и при а = 50 o - на 46,3 %.
ПРОВЕДЕНИЕ ЭКСПЕРИМЕНТАЛЬНЫХ ИССЛЕДОВАНИЙ ПРОИЗВОДИТЕЛЬНОСТИ
Для проверки адекватности и корректности разработанной математической модели производительности механического дискового зубчатого БЗУ были проведены экспериментальные исследования на его макете (рис. 6).
Экспериментальные исследования производительности (шт./мин) проводились при значениях частоты вращающегося диска 3; 4; 5; 6; 7; 8; 10 об./мин, что соответствует окружным скоростям захватывающих органов 0,063; 0,084; 0,105; 0,126; 0,147; 0,167; 0,209 м/с. На каждом значении проводилось по 10 замеров.
Результаты вычислений среднего квадратического отклонения ст , дисперсии средней производительности D, коэффициента вариации 5 и коэффициента асимметрии A представлены в табл. 1 для деталей с l / d i = 2,5 и l/ d i = 2 .
а
б
Рис. 5. Графики зависимости вероятности захвата (а) и производительности (б) БЗУ от окружной скорости захватывающих органов и угла наклона бункера
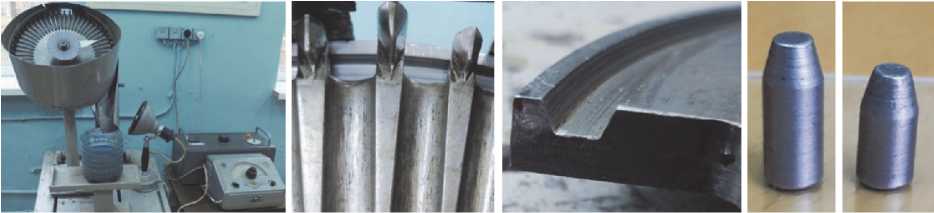
а б в г д
Рис. 6. Экспериментальный натурный образец усовершенствованного БЗУ (а) с зубьями (б) и кольцевым ориентатором (в), установленным в основании, и два типа асимметричных деталей с соотношениями l / d 1 = 2,5 (г) и l / d 1 = 2 (д)
Таблица 1. Результаты вычислений при проведении экспериментальных исследований
|
Параметр и типоразмер |
n , об./мин |
|||||||
|
3 |
4 |
5 |
6 |
7 |
8 |
10 |
||
|
и |
l / d 1 = 2,5 l / d i = 2 |
0,06 |
0,08 |
0,11 |
0,13 |
0,15 |
0,17 |
0,21 |
|
Пт |
l / d 1 = 2,5 l / d 1 = 2 |
168 |
224 |
280 |
336 |
392 |
448 |
560 |
|
П ер |
l / d 1 = 2,5 |
54 |
81 |
100 |
122 |
143 |
155 |
170 |
|
l / d 1 = 2 |
76 |
104 |
125 |
140 |
162 |
177 |
198 |
|
|
П |
l / d 1 = 2,5 |
0,324 |
0,361 |
0,358 |
0,362 |
0,364 |
0,345 |
0,301 |
|
l / d 1 = 2 |
0,455 |
0,466 |
0,448 |
0,418 |
0,414 |
0,396 |
0,374 |
|
|
о |
l / d 1 = 2,5 |
2,22 |
2,69 |
2,90 |
3,41 |
3,50 |
5,27 |
5,91 |
|
l / d 1 = 2 |
2,37 |
2,80 |
3,13 |
3,57 |
3,60 |
3,69 |
4,40 |
|
|
D |
l / d 1 = 2,5 |
4,93 |
7,21 |
8,40 |
11,6 |
12,3 |
27,8 |
34,9 |
|
l / d 1 = 2 |
5,60 |
7,82 |
9,82 |
12,71 |
12,93 |
13,60 |
19,38 |
|
|
5 |
l / d 1 = 2,5 |
4,08 |
3,32 |
2,89 |
2,80 |
2,46 |
3,41 |
3,49 |
|
l / d 1 = 2 |
3,10 |
2,68 |
2,50 |
2,54 |
2,21 |
2,08 |
2,22 |
|
|
A |
l / d 1 = 2,5 |
0,13 |
-0,25 |
0,20 |
0,28 |
0,51 |
-1,58 |
0,34 |
|
l / d 1 = 2 |
-0,60 |
-1,24 |
0,81 |
-0,26 |
-0,91 |
-0,33 |
0,26 |
|
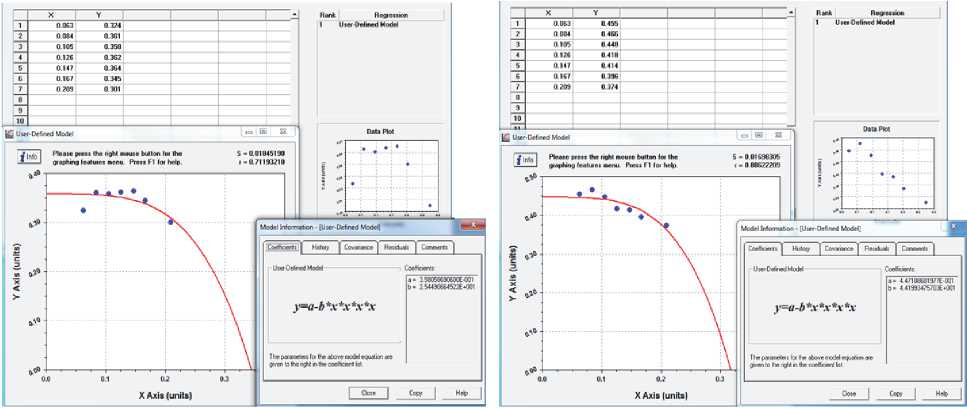
На рис. 7 представлены результаты аппроксимации с помощью стандартного пакета CurveExpert 1.4 вероятности захвата от окружной скорости в виде функции n = a - b и 4 или П = 0,358 - 24,45 u 4 для детали с l / d i = 2,5 и П = 0,447 - 4 ,2 и 4 для детали с l / d 1 = 2.
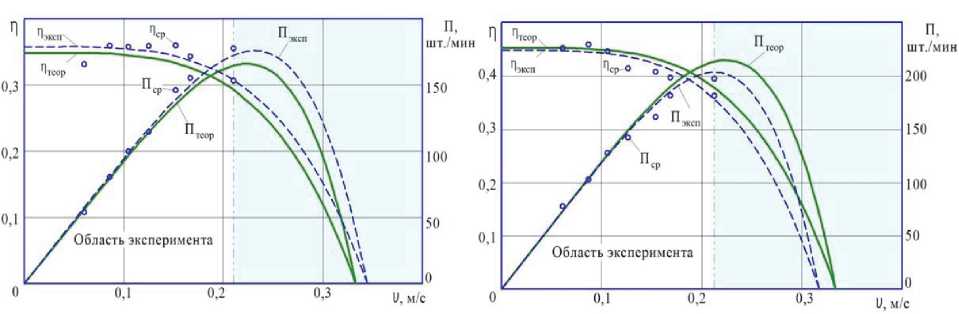
С использованием разработанной концепции для макета усовершенствованного БЗУ были определены коэффициенты математической модели производительности для каждой детали. На рис. 8 представлены сравнительные графики зависимостей производительности и вероятности захвата, полученные теоретически с использованием разработанной концепции и экспериментально на натурном образце для каждой детали.
Как показывают графики, экспериментальные и теоретические зависимости вероятности захвата и производительности механического дискового зубчатого БЗУ от окружной скорости захватывающих органов практически совпадают.
Расчет отклонений экспериментальных значений вероятности захвата и производительности БЗУ от теоретических по известным формулам показал, что разница составляет до 2,21 и 5,23 % для деталей с l / d i = 2,5 , а для деталей с l/ d i = 2,5 - до 1,34 и 6,57 % соответственно.
ЗАКЛЮЧЕНИЕ
Результаты сравнения подтверждают адекватность и корректность разработанной математической модели производительности зубча-
б
Рис. 7. Аппроксимирующие функции (в CurveExpert 1.4) экспериментальной зависимости вероятности захвата от окружной скорости для деталей с l / d ^ = 2,5 (а) и l / d ^ = 2 (б)
а
б
Рис. 8. Сравнительные графики теоретических и экспериментальных значений вероятности захвата и производительности БЗУ для деталей с l / d ^ = 2,5 (а) и l / d ^ = 2 (б)
того БЗУ и кольцевым ориентатором на основе 2. разработанной концепции.
Представленная математическая модель вероятности захвата деталей позволяет на ранних этапах проектирования оценить максимальные возможности и оптимальные параметры 3. механических дисковых БЗУ для обеспечения требуемых значений производительности при загрузке широкой номенклатуры асимметричных деталей тел вращения и учесть взаимосвя- 4. занное влияние на производительность БЗУ его конструктивных параметров, окружной скорости захватывающих органов, параметров, характеризующих детали, а также коэффициентов трения, как между деталями, так и между деталями и конструктивными элементами БЗУ. 5.
Список литературы Теоретическое и экспериментальное исследование производительности зубчатого бункерного загрузочно-ориентирующего устройства для асимметричных деталей тел вращения
- Автоматическая загрузка технологических машин: Справочник / И.С. Бляхеров [и др.], под общ. ред. И.А. Клусова. - М.: Машиностроение, 1990. - 400 с. EDN: WQPXRB
- Васин, С.А. Основные направления проектирования механических дисковых бункерных загрузочных устройств для асимметричных деталей формы тел вращения / С.А. Васин, Е.В. Пантюхина // Вестник Ростовского государственного университета путей сообщения. - 2023. - № 1. - С. 8-15. EDN: CUEBFL
- Pantyukhina E.V.Integrated approach methodology for evaluating the feed rate of mechanical disk hopper-feeding devices // IOP Conf. Series: Journal of Physics: Conf. Series 1546 (2020) 012024.
- Васин, С.А. Методика определения вероятности захвата асимметричных деталей формы тел вращения в дисковых бункерных загрузочно-ориентирующих устройствах / С.А. Васин, Е.В. Пантюхина // Вестник МГТУ им. Н.Э. Баумана. Сер. Машиностроение. - 2023. - № 3. - С. 64-88. -. DOI: 10.18698/0236-3941-2023-3-64-88 EDN: CXNFSY
- Pantyukhina E.V., Preis V.V., Khachaturian A.V. Feed rate evaluation of mechanical toothed hopper-feeding device with ring orientator for parts, asymmetric at the ends // IOP Conf. Series: Journal of Physics: Conf. Series 1260. 2019. Р. 032032. EDN: BJQPIJ
- Давыдова Е.В., Прейс В.В., Хачатурян А.В. Бункерное загрузочное устройство: пат. 159403 (РФ). 2016. EDN: PHWASO
