Управление электроприводами для механизмов параллельной кинематики робота манипулятора типа "хобот"

Автор: Буянкин Виктор Михайлович
Журнал: Космические аппараты и технологии.
Рубрика: Робототехника и мехатроника
Статья в выпуске: 1 (1), 2012 года.
Бесплатный доступ
Работа посвящена разработке и исследованию эффективности нейросетевых систем управления механизмами параллельной кинематики: манипуляторами робота типа «Хобот».
Управление, электропривод, механизмы параллельной кинематики, робот, манипулятор
Короткий адрес: https://sciup.org/14117263
IDR: 14117263 | УДК: 621.865.8
Management of electric drives for mechanisms of parallel kinematics of the robot of the manipulator of type "trunk"
The given work is devoted working out and efficiency research neural network control systems of mechanisms of parallel kinematics: manipulators of the robot of type «Trunk».
Текст научной статьи Управление электроприводами для механизмов параллельной кинематики робота манипулятора типа "хобот"
ны относительно нижней [2]. Кинематическая схема манипулятора определяет систему координат его исполнительных движений, т.е. базис исполнительных движений. Механизмы с параллельной кинематикой требуют использования непрямоугольного (нелинейного) базиса, поэтому, как следствие, управление роботами-манипуляторами параллельной кинематики существенно сложнее управления традиционными роботами-манипуляторами. Все это приводит к решению задач разработки новых неклассических методов управления такими механизмами, в частности нейросетевых методов управления.
Данная работа посвящена разработке и исследованию эффективности нейросетевых систем управления механизмами параллель-
ИССЛЕДОВАНИЯ
HAVKO____________
Ограда ной кинематики: манипуляторами робота типа «Хобот» [1, 2, 3]. Важнейшей составной частью нейросетевых систем управления являются нейросетевые модели объектов управления механизмами параллельной кинематики, которые получаются в результате выполнения процедуры нейроидентификации.
Заметим, что в настоящее время нейросетевые технологии представляют собой одну из наиболее динамично развивающихся областей искусственного интеллекта. Методы ней- 30 росетевых технологий успешно применяются в различных прикладных областях, таких как прогнозирование различных временных рядов, управление сложными динамическими системами, распознавание образов и т.д.
Основными отличительными признаками нейросетевых структур являются:
-
- универсальные аппроксимирующие свойства многослойных нелинейных нейронных сетей, позволяющие сколь угодно точно равномерно приблизить любую непрерывную функцию многих переменных, определенную на любом компактном множестве;
-
- адаптивность нейронных сетей, обусловленная их способностью обучаться в процессе своего функционирования;
-
- способность нейронных сетей к параллельной обработке сигналов, что позволяет использовать их для идентификации и управления многомерными нестационарными многосвязными динамическими системами.
В многосекционном роботе-манипуляторе в результате перемещения секций манипулятора изменяются жесткости штанг, их моменты инерции, а также моменты инерции платформ. Эти обстоятельства наряду с наличием сухого и вязкого трений в шарнирах манипулятора могут привести к ухудшению его статических и динамических характеристик, в том числе к колебаниям конструкции манипулятора. Поэтому к приводам штанг манипулятора предъявляются высокие требования. Вообще говоря, в качестве приводов (актуаторов) линейных перемещений штанг манипуляторов могут быть использованы гидравлические, пневматические и электрические приводы. Каждый из этих приводов обладает своими достоинствами и недостатками. В работе в качестве приводов штанг манипуляторов рассматриваются электрические приводы, которые имеют невысокую цену, большой ресурс и достаточно компактны.
№ 1 (1) январь-март 2012
Классическая система управления. Положим, что изменение длины каждой из штанг рассматриваемого механизма параллельной кинематики осуществляется с помощью электропривода, функциональная схема которого представлена на рис. 1.
На рис. 1 приняты следующие обозначения: Р 1 , Р 2, Р з - путевой, скоростной и токовый регуляторы соответственно; СП - силовой преобразователь (трехфазный инвертор напряжения); ЭД - асинхронный электродвигатель переменного тока; ИМ + Н - исполнительный механизм вместе с нагрузкой.
Исходная обобщенная система нелинейных дифференциальных уравнений, описывающая силовой преобразователь и электродвигатель, приведена в работе [6]. Используемая модель динамики исполнительного механизма имеет следующий вид:
j d Ф дв ^—1 ^ d Ф мех м м .
J 1 dt 2 + l Ф дв + h dt + M тр 1 M дв ’
J d Ф мех _ pl + ^ d Ф дв + у
J 2 dt 2 1 ' + h dt + M ТР 2 '
Здесь соответственно принято. Что ф,, ϕ мех – углы поворота вала электродвигателя и механической передачи; J 1 , J 2 - моменты инерции вала электродвигателя и механической передачи; l – коэффициент жесткости; h - коэффициент вязкости; М , М - момен- тр1 тр2
ты трения в механической передаче; М дв - вращающий момент двигателя.
Люфт в исполнительном механизме определяет выражение
Структурная схема трехконтурной САУ рассматриваемым электроприводом представлена на рис. 2, где
Кл 0 01
W р Д p ) = Kр Х + -1 = 0,3 + p
W р 2 ( p ) = - р 2 + — = 0,2 + —, ps
K 0,04
Wр з( Р) = -р з + — = 0,1 + , pp
W en ( Р ) =
- сп = 100
Tp + 1 0,1 p + 1,

Рис. 1. Функциональная схемы электропривода с механической передачей: 1, 2, 3 – путевой, скоростной и токовый контуры соответственно
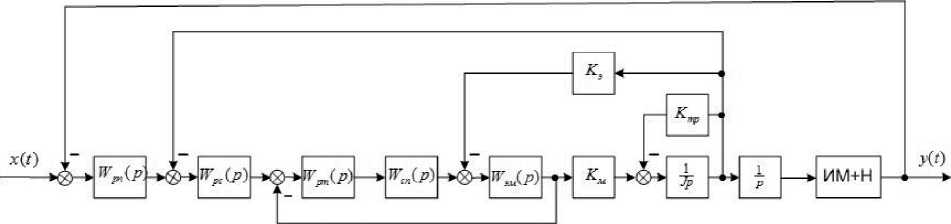
Рис. 2. Структурная схема САУ электроприводом
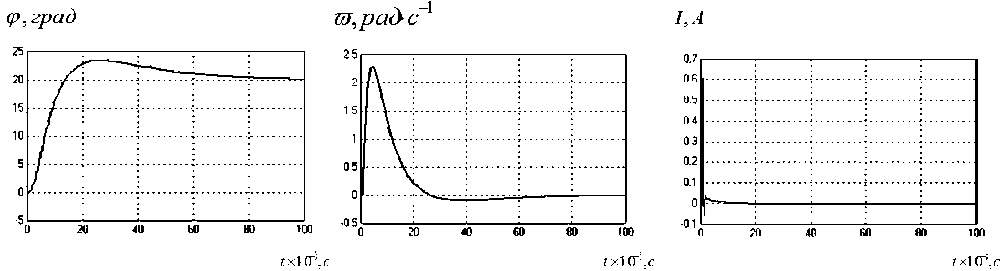
Рис. 3. Переходные процессы в САУ электроприводом: параметры механической передачи не меняются во времени
Wэм ( Р ) = : ' = —
LI- p + 1 p + 1
R
-
- передаточные функции регуляторов Р 1 , Р Р 3 силового преобразователя и электромеханической части электродвигателя соответ
ственно; —, — - передаточные функции ме-Jp p ханической части электродвигателя; Kм = 0,3, Kэ = 0,5, Kтр = 0,1 - соответствующие коэффициенты передачи; J = 1 - момент инерции ротора электродвигателя.
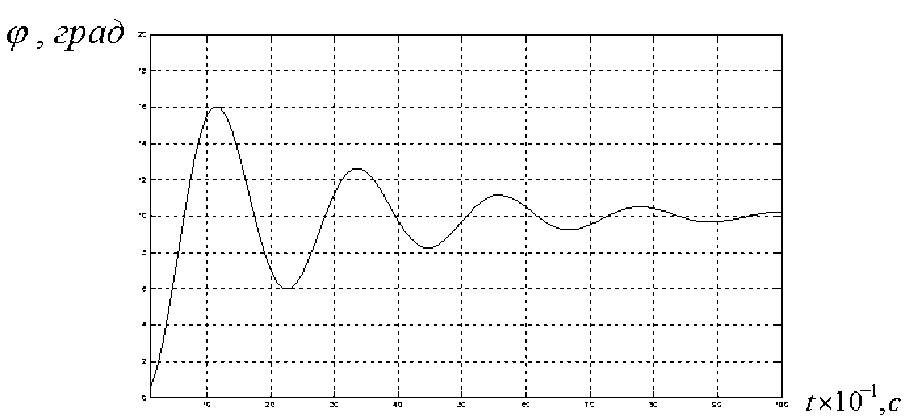
Переходные процессы в рассматриваемой САУ, когда параметры исполнительного механизма не меняются во времени, представлены на рис. 3. Аналогичные переходные процессы в системе для случая, когда параме- тры этого механизма меняются во времени, иллюстрирует рис. 4. Рисунки соответствуют случаю, когда нагрузка имеет передаточную функцию
0,5
0,5 p 2 + 0,3 p + 1 "
W h ( Р ) =
Результаты исследования, представленные на рис. 4, показывают, что в условиях, когда параметры механической передачи меняются во времени, рассматриваемая САУ не обеспечивает удовлетворительное качество статических и динамических характеристик рассматриваемого привода. Существенно улучшить качество управления могут нейросетевые САУ.
Адаптивная нейросетевая САУ с эталонной моделью. Структурная схема рас-
ГКО
ГРАДА
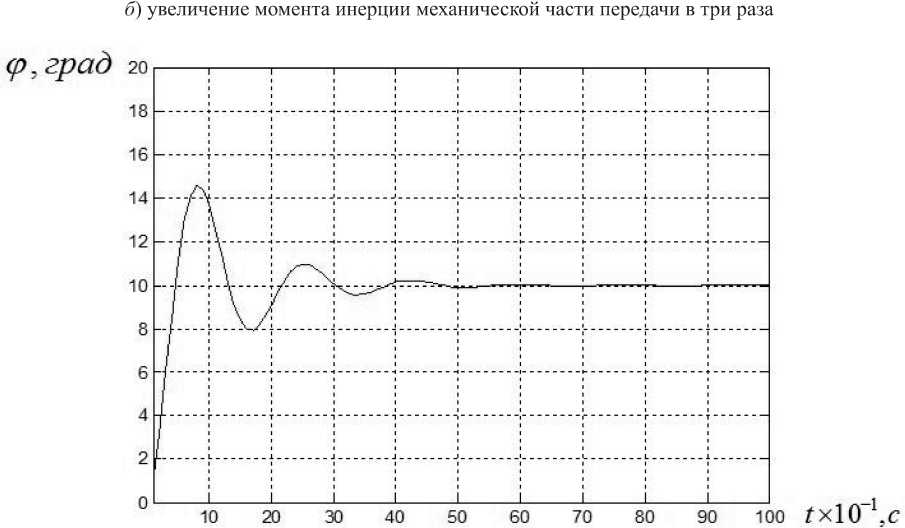
а ) увеличение момента инерции механической части передачи в два раза
в ) уменьшение жесткости механической части передачи в два раза
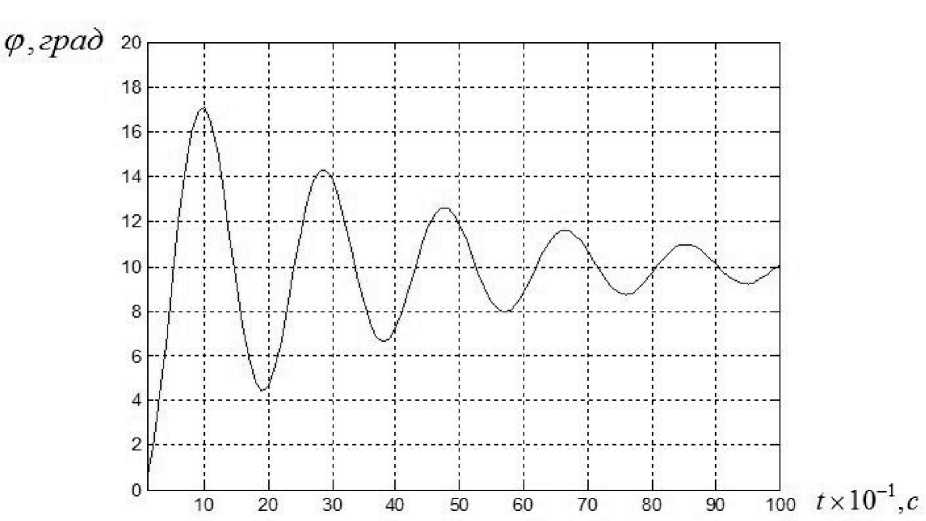
г ) уменьшение жесткости механической части передачи в три раза
Рис. 4. Переходный процесс в САУ: параметры механической передачи меняются во времени
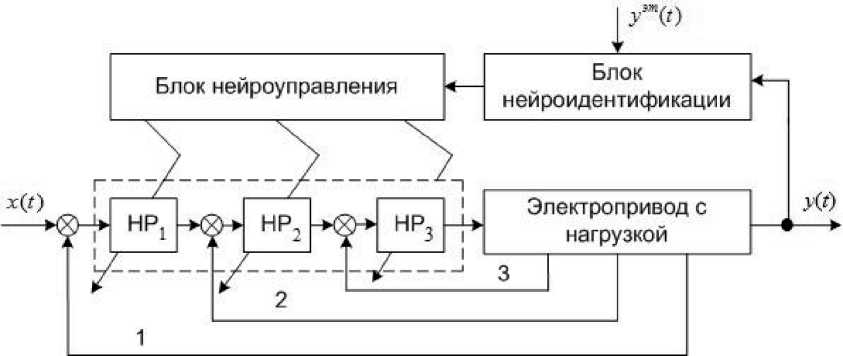
Рис. 5. Схема адаптивной нейросетевой САУ электроприводом с эталонной моделью:
1, 2, 3 – контуры угла поворота, тока и скорости соответственно
сматриваемой адаптивной нейросетевой САУ электроприводом с эталонной моделью представлена на рис. 5. Основными блоками САУ являются блок нейроидентификации, блок нейроуправления и блок нейрорегуляторов, включающий в себя нейрорегуляторы НР 1 , НР2, НР 3 .
Функционирование данной САУ осуществляется по схеме, включающей в себя следующие основные шаги:
-
- нейроидентификация электропривода;
-
- сравнение результатов нейроидентификации с переходной характеристикой эталонной модели у эт ( t );
-
- формирование обучающих выборок для нейрорегуляторов НР 1 , НР2, НР 3 и обучение каждого из них.
Блок нейрорегуляторов рассматриваемой САУ должен обеспечивать необходимые запасы устойчивости, а также требуемые статические и динамические характеристики электропривода. Нейрорегулятор может быть построен на основе различных нейронных сетей. Остановим свой выбор на многослойной нейронной сети с прямой передачей сигнала и обратным распространением ошибки, которая нашла наибольшее применение в нейросетевых САУ.

ИССЛЕДОВАНИЯ
КО-

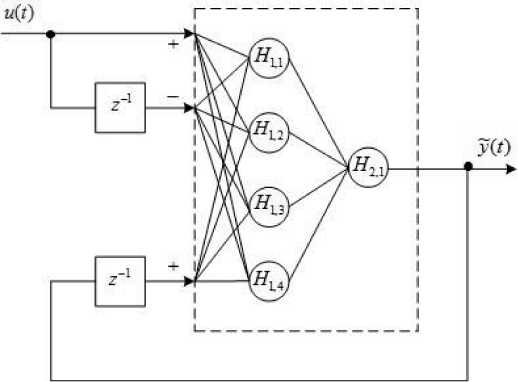
Рис. 6. Функциональная схема нейрорегулятора
Используем в качестве нейрорегуляторов НР 1 , НР2, НР 3 нейрорегулятор на основе указанной нейронной сети, функциональная схема которого представлена на рис. 6. Нейронная сеть содержит в промежуточном слое 4 нейрона и один нейрон – в выходном слое. Нейроны имеют функцию активации типа pureline [4]. Элемент z–j осуществляет задержку входного сигнала на j временных шагов. На входы нейронной сети подаются сигнал управления u ( t ) и выходной сигнал сети ỹ ( t ) .
Процедура настройки нейрорегулятора заключается в настройке весовых коэффициентов и параметров нейронов и производится в следующие четыре этапа:
-
- выбор начального числа нейронов в промежуточном слое сети;
-
- инициализация сети - присваивание весам и смещениям нейронов случайных значений из заданного диапазона;
-
- обучение сети на заданной выборке;
-
- завершение настройки в случае успешного обучения; увеличение числа нейронов и переход к этапу 2 в противном случае.
Для оценки требуемого числа нейронов в сети используем формулу mM (M J
---------< N < m + 1 ( и + m + 1 ) + m , (4)
1 + log2 M w ( m )V )
где и - размерность входного сигнала; m - размерность выходного сигнала; M - число элементов в обучающей выборке; N w — необходимое число синаптических весов нейронов. Оценив необходимое число весов, можно рассчитать число нейронов N в слоях. Например, для двухслойной сети [5] имеем
N = -N • (5)
и + m
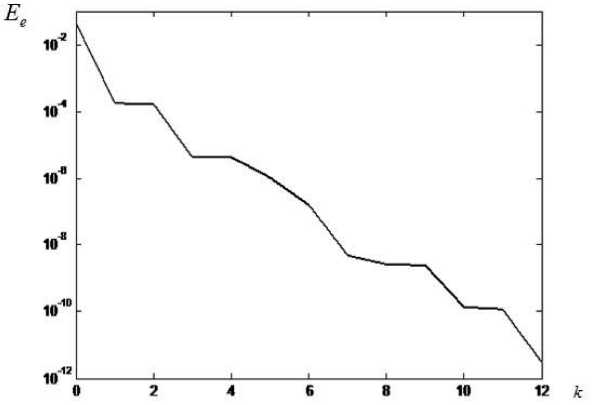
Рис. 7. Изменение ошибки в процессе обучения нейрорегулятора: j – число эпох обучения
Обучение рассматриваемого нейрорегулятора реализовано с использованием метода обратного распространения ошибки. Процесс обучения иллюстрирует рис. 7, где Ee ( t ) – среднеквадратичная ошибка обучения .
В результате обучения нейрорегулятора получены следующие веса нейронов промежуточного и выходного слоев:
w 1,1,1 = 0,9049; w 1,1,2 = 0,7664; w 1,1,3 = 0,6748;
w 1,2,1 = -0,5326; w 1,2,2 = 0,5086; w 1,2,3 = -0,0807;
w 1,3,1 = 0,2125; w 1,3,2 = -0,0837; w 1,3,3 = 0,2245;
w 1,4,1 = -0,0241; w 1,4,2 = -0,9776; w 1,4,3 = 0,6131;
w 2,1,1 = 0,8849; w 2,1,2 = 0,8169;
w 2,1,3 = -0,1682; w 2,1,4 = 0,8263.
Здесь wijk – вес k -го входа нейрона Hij .
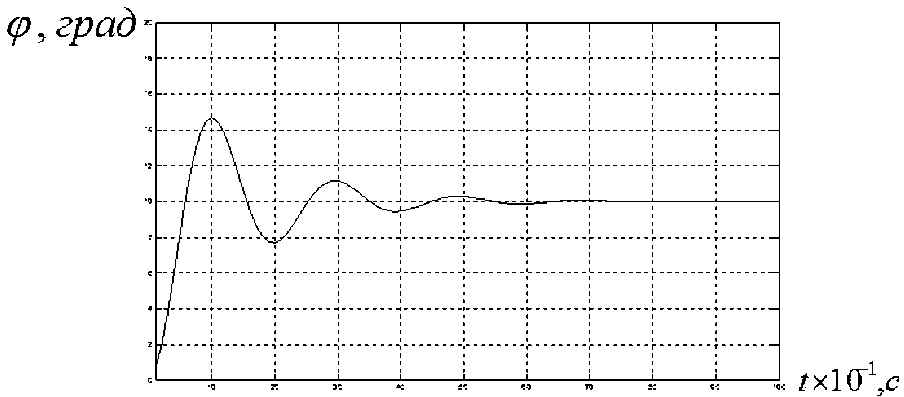
Структурная схема САУ электроприводом с рассмотренным путевым нейрорегулятором приведена на рис. 8. Передаточные функции и параметры системы определены ранее. Переходный процесс в САУ, использующий рассмотренный нейрорегулятор, иллюстрирует рис. 9.
Результаты исследования показывают, что электропривод с нейрорегуляторами на основе многослойной нейронной сети с прямой передачей сигнала и обратным распространением ошибки обеспечивает необходимые статические и динамические характеристики рассматриваемого манипулятора робота типа «Хобот».
Список литературы Управление электроприводами для механизмов параллельной кинематики робота манипулятора типа "хобот"
- Буянкин В. М. Применение нейронных сетей для управления // Нейросетевые методы повышения эффективности систему правления сложными элементами электротехнических установок. - LAMBERN Academic Publishing Germany, 2011. 265 с.
- Буянкин В. М. Нейроуправление роботами с параллельной кинематикой // Применение нейронных сетей для управления роботами. - LAMBERN Academic Publishing Germany, 2011. 167 с.
- Буянкин В. М., Гоменюк С. 3. М., Карпенко А. П., Литун Т. О. Нейросетевая идентификация и управление некоторыми механизмами параллельной Кинематики // Приложение к журналу «Информационные технологии». 2011. № 11.
- Буянкин В. М., Пантюхин Д. В. Нейроидентификация статических и динамических характеристик асинхронного электродвигателя переменного тока // Нейрокомпьютеры: разработка и применение. 2009. № 7. С. 69?73.
- Буянкин В. М. Нейроидентификация, нейроуправление, нейропрогнозирование статических и динамических характеристик электропривода // Вестник компьютерных технологий. 2010. № 5. С. 24?29.
- Буянкин В. М., Пантюхин Д. В. Синтез интегрального пропорционального нейрорегулятора для управления электроприводом // Известия ТРГУ / Таганрог. гос. радиотехн. ун-т. 2006. № 3. С. 115?121.
- Буянкин В. М. Интегральный, пропорциональный, дифференциальный нейрорегулятор // Вестник МГТУ им. Н. Э. Баумана, Сер. «Естественные науки». 2006. № 3. С. 56?61.
- Буянкин В. М. Двухконтурная система нейроуправления электроприводом с нейросамонастройкой // Нейрокомпьютеры: разработка и применение. 2006. № 8?9. С. 90?94.
