Управление с "поводырем" двухзвенным манипулятором с вращательными парами

Автор: Лутманов С.В., Попова Е.С.
Журнал: Вестник Пермского университета. Математика. Механика. Информатика @vestnik-psu-mmi
Рубрика: Механика. Математическое моделирование
Статья в выпуске: 4 (27), 2014 года.
Бесплатный доступ
Решается игровая задача управления о переводе схвата манипулятора на базовую траекторию движения в предположении, что измерение фазового вектора игры производится с некоторой погрешностью. Численно подтверждено, что процедура управления с "поводырем" является эффективным средством управления конфликтно-управляемым динамическим объектом в условиях неточного измерения фазового вектора дифференциальной игры.
Манипулятор, математическая модель, дифференциальная игра, управление с "поводырем"
Короткий адрес: https://sciup.org/14729943
IDR: 14729943 | УДК: 519.7
Control with a "leader" the double-hinged arm with rotatory pairs
The game task of management about translation of gripper of manipulator decides on the base trajectory of motion in supposition, that measuring of phase vector of game is produced with some error. It is numeral confirmed that management procedure with a "leader" is the effective means of management by the conflict-guided dynamic object in the conditions of the inexact measuring of phase vector differential game.
Текст научной статьи Управление с "поводырем" двухзвенным манипулятором с вращательными парами
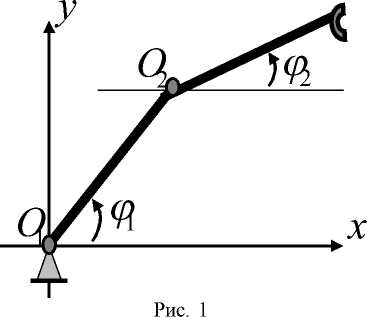
На горизонтальной плоскости рассматривается двухзвенный механический манипулятор с двумя вращательными парами (рис. 1), управление которым осуществляется моментами, развиваемыми в соединительных парах. Задана траектория схвата и его закон движения вдоль этой траектории. Указанный закон движения реализуется посредством известных программных управлений. В случае, когда начальные условия для схвата нарушаются, его дальнейшее движение будет отклоняться от базового.
Возвращение схвата на базовую траекторию осуществляется посредством применения дополнительных управлений. В предположении, что нарушения начальных условий незначительны, задача о возращении схвата на базовую траекторию сводится к задаче приведения фазового вектора линеаризованной модели в начало координат. Линеаризация производится в окрестности базового закона движения. В работе [2] эта задача была решена в предположении, что в соединительных парах могут возникать неконтролируемые помехи в виде вращательных моментов. Неконтролируемой помехе предписывалось стремление максимально навредить в решении задачи перевода схвата на базовую траекторию. На дополнительные управления и вращательные моменты, развиваемые неконтролируемой помехой, накладывались геометрические ограничения в виде выпуклых компактных множеств.
В данной статье допускается, что измерение фазового вектора линеаризованной модели производится неточно. Известно [3], что в этих условиях оптимальная стратегия управления, реализованная в форме прицеливания на соответствующий стабильный мост, является неустойчивой по отношению к ошибке измерения фазового вектора. В данной статье оптимальное управление манипулятором осуществляется в виде процедуры управления с " поводырем " [1], преодолевающей этот недостаток.
-
1 . Линеаризованная модель
Манипулятор представляет собой механизм с двумя степенями свободы. Пусть qw. q0: [0,1]^ R4 закон движения, манипу лятора, порожденный управлением w* (•) и 0
выходящий из начального положения q , а qw• q0* : [0,1] ^ R4 - выходящий из начального положения q °*. Полагаем x ( t ) qw** ,q0* ( t ) qw**,q0 (t ) , t e[0,1] .
Предполагается, что величина ||q °*- q 0|| мала. Дифференциальные уравнения линеаризованной модели имеют вид [2]
x _ A ( t ) x + B ( t ) ( u + v ) , (1.1)
Q _ bw 1 — bcq 4 2 sin( q 1 — q 2 )
-
3 ab — c 2cos2( q 1 — q 2 )
—
cw2 cos( q 1 — q 2 ) ab — c 2 cos2 ( q 1 — q 2 ) 1 c2 q 32sin[2( q 1 — q 2 )] -
2 ab — c2cos2(q 1 — q2)
q aw2 + acq 32 sin( q 1 — q 2)
-
4 ab — c 2cos2( q 1 — q 2)
—
c w 1 cos( q 1 — q 2 ) ,
2------2+ ab — c cos (q1 — q2)
, 1 c2 q 4 2sin[2( q 1 — q 2 )]
+— •------;----;---------
2 ab — c 2cos2( q 1 — q 2) ,
Здесь u e R2 - вектор дополнительных управляющих параметров, а v e R2 - вектор
где
A (t)
_ d Q ( t , q , u )
d q
управляющих параметров помех. При этом
u e P _«
f 0
fF 1
P q 2 )
fF 1
P q 2 )
*
*
B (t)
q _ q * 0 w , q
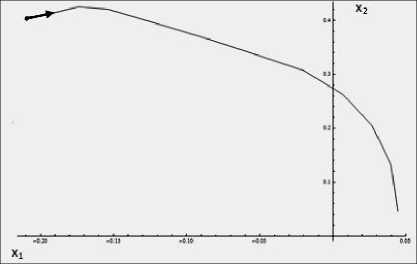
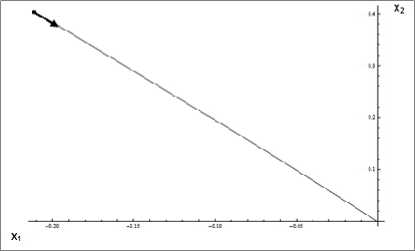
f> 1 p 1 ld q з) * * (t), w=w •( t) p 1Id q 4) p Q4 1 * * ld q 4)) V eQ _< fV11 P v 2 ) [ u’1 < u 2 ) 22 2 u1 + u2< a 1, V’2+ v 22 < в21, a > в > 0. _ d Q (t, q, w) 5 w f 0 0 P Q3 1 * 0 (t), w=w • 0 1 0 11 fd Q3 1* q_q . t w ,q '•( t) \ d w1 ) * d w1) P w2 ) * F P w2 ) ) , Задача возвращения схвата на базовую траекторию представляет собой антагонистическую дифференциальную игру наведения-уклонения, целевым множеством для которой служит начало координат. В этой игре первый игрок распоряжается управляющими параметрами u e P, а второй - параметрами v e Q. Первый игрок решает задачу наведения и поэтому является игроком-союзником. Свою оптимальную стратегию он строит в форме экстремального прицеливания на стабильный мост, обрывающийся в конечный момент на целевом множестве. Выше уже отмечалось, что такой способ управления является эффективным, если измерение фазового вектора игроком-союзником производится без погрешностей. В противном случае игрок-союзник должен применить процедуру управления с "поводырем". Q = f Q1 Q2 Q3 IQ4 ) , Q1 = q3, Q2 = q4, 2. Процедура управления с "поводырем" Предполагается, что в любой момент времени выполнено неравенство Ix (t)" x •( 11< Z Z a 0. где x*(t)- измеренное значение фазового вектора линеаризованной модели. Следуя [1] опишем позиционную процедуру управления с "поводырем". Пусть W - стабильный мост первого игрока в антагонистической дифференциальной игре с динамикой (1.1), обрывающийся в момент времени 5 g[0, T] в начале координат. Введем виртуальный динамический объект, который будем называть "поводырем". Его динамика описывается тем же дифференциальным уравнением (1.1), что и реальный объект. Для отличия фазовый вектор "поводыря" будем обозначать буквой w . Таким образом, w = A (t) w + B (t)(u + v), t g[ 10, T ] , w G Rn , u G P, v G Q. Рассмотрим разбиение Д промежутка времени [ 10,5] на полуинтервалы: К,Ts+1 ) , s = 0,1,^, k-1, Т 0 = t 0, тк = 5. Опишем действия первого игрока на каждом из указанных полуинтервалах (см. рис. 2). Рис. 2. Траектория "поводыря" Полуинтервал [т0,т1). Определяем точку w0на сечении моста как ближайшую к x *. Имеем IIx ’-М=.min,! x'-w • (2.1) где x * измеренное первым игроком в начальный момент времени t0положение фазового вектора. Управление u0 = const первого игрока на полуинтервале [т0,т1) находится из условия (z0, Bu °) = min (z0, Bu}, (2.2) ' 0 / u G P ' 0 ' где z0 = x* - w0. Если условия (2.1), (2.2) определяют вектор u0 g P неоднозначно, то берется любой из них. Движение реального динамического объекта получим интегрированием дифференциального уравнения x = A (t) x + B (t)(u 0 + v (•)), x (t J = x *, t g[t о, т1). Полагаем x1 = lim x (t). Движение пово-t ^T1 дыря w(•) отождествим с тем решением дифференциального уравнения в контингенциях w g A (t) x + B (t)(P + v0), w(t*) = w0, tG[T0,т1), ( z0, Bv0) = max (z0, Bv}, ' / v G q x ' для которого выполнено включение w(т1 )g W (т1). Такое решение существует по определению стабильного моста. Полагаем w1 = lim w (t). t ^т1 Полуинтервал [т1, т2). Пусть x1* - измеренное первым игроком в момент времени τ1положение фазового вектора. В общем случае w1 ^ x* . Управление u1 = const первого игрока на полуинтервале [т1, т 2) определяем из условия (z, Bu '\ = min (z,, Bu}, (2.3) \ 1 / u G P ' 1 где z1 = x* - w1. Если условие (2.3) определяет вектор u1g P неоднозначно, то берется любой из них. Движение реального динамического объекта получим интегрированием дифференциального уравнения x = A (t) x + B (t)(u1 + v (•)), x(т1 ) = x1, t G[т1, т2 ) . Полагаем x2= lim x (t). Движение "по-t ^т 2 водыря" w(•) отождествим с тем решением дифференциального уравнения в континген-циях w g A (t) x + B (t)(P + v1), w(т1 ) = w1, tG[то,т1), (Zj, Bv1) = max (zj, Bv}, ' ' vgq ' ' для которого выполнено включение w(т2 )e W (t2). Такое решение существует по определению стабильного моста. Полагаем w2= lim w (t). и т. д. t ^Т 2 Полуинтервал [ts,ts+1). Пусть x* - измеренное первым игроком в момент времени τs положение фазового вектора. В общем случае ws ^ x*. Управление us = const первого игрока на полуинтервале [ts,ts+1) определяем из условия (zs,Bus\ = min(z ,Bu),, (2.4) s u e PX где zs = xs - ws. Если условие (2.4) определяет вектор us e P неоднозначно, то берется любой из них. Движение реального динамического объекта получим интегрированием дифференциального уравнения X = A (t) x + B (t)(us + v (•)), x(Т ) = Xs , te[Ts, Ts+1 ). Полагаем xs+1= lim x (t). Движение t ^t+1 "поводыря" w(•) отождествим с тем решением дифференциального уравнения в контин-генциях w e A (t) x + B (t)(P + vs), w (Ts ) = ws , t e[Ts ,Ts +1 ) , (zs,Bvs\ = max(z ,Bv), \ ' veQ ' ' для которого выполнено включение w(ts+1) e W (ts+1). Такое решение существует по определению стабильного моста. Полагаем ws+1= lim w (t). и т. д. t ^Ts+1 Таким образом, на каждом полуинтервале [ts,ts+1), s = 0,1,...,k -1 разбиения промежутка времени [t*, T] будет получено движение "поводыря" w (•) и движение реального динамического объекта x (•) .Справедливо следующее утверждение [1]. Позиционная процедура управления с "поводырем" позволяет по любому £ > 0 подобрать величины Z (£)> 0 и 5 (£ )> 0, для которых бы выполнялось xА (0) < £ , где xА(-)- ломаная Эйлера, выходящая из начального положения (10, x0 )e W и порожденная процедурой управления с "поводырем", если длина шага разбиения А меньше д (£ )> 0, а точность измерения фазового вектора не ниже Z (£) > 0. 3. Численный эксперимент В рассматриваемой дифференциальной игре стабильный мост первого игрока, обрывающийся в момент времени 5 e [0, T] в на- чале координат, имеет вид W = {(t,x)|£ (t,x)< 0, t e[0,5]}, где £ 0 (t, x ) = T = max{0, max ^x, s (t)} + J minBB (t) u, s (t)ddz + l,SueP T + j max BB (t ) v, s (t ) ^dz t - max meM (3,1) S(4)={l e R 2| ||l|| = 1}, s (t ) = ( X [ T, t]) ' l °, т e [t, T], l0 e S(4) - вектор, доставляющий максимум в (3.1). При проведении численного эксперимента были установлены следующие значения параметров задачи. Каждое звено двух- звенного манипулятора имеет длину l1 = 12 = 1 м, масса схвата m=1 кг , массы стержней - m1 = m2 = 1 кг . Отклонение схвата манипулятора от начального положения определяется вектором x 0* 1-0.21 рад ^ 0.40 рад 0 рад сек рад V 0 ~к / и составляет величину р0 = 0.45177 . Заметим, что (0, x°*)e W . Принимается также, что а = 10 н • м, в = 1 н • м, д = 0.005 м . Все вычисления проводились в среде пакета Mathematica 8. В рамках численного эксперимента рассмотрены два случая. В первом случае в условиях неточного измерения фазового вектора игрок-союзник реализует свою стратегию в виде стандартного прицеливания на мост, а во втором случае – в форме процедуры управления с "поводырем". В процессе прицеливания на мост определение w0— точки моста, ближайшей к точке x £ W (t) = {x е R41 (t, x) e W}, t e [0,5] осуществляется путем решения задачи математического программирования на условный минимум с ограничением типа неравенства ( pl - x1 ) +( p2 - x2 ) +( p3 - x3 ) + +( P 4 - x4) ^ min, (3.2) s(t,x1,x2,x3,x4,)< 0. (3.3) Заметим, что задача (3.2), (3.3) является невырожденной задачей выпуклого программирования. Тогда необходимые условия локального минимума в форме правила множителей Лагранжа служат для нее и достаточными условиями глобального минимума. При реализации процедуры управления с "поводырем", описанной в предыдущем пункте, удержание "поводыря" на стабильном мосту на каждом шаге процесса осуществляется выбором управляющего па- раметра первого игрока из условия ds < 0. dt Случай первый. Управление манипулятором производится в форме стандартного прицеливания на стабильный мост в условиях неточного измерения фазового вектора. На рис. 3 показана траектория фазового вектора игры в проекции на первые две координаты, в предположении, что второй игрок действует самым неблагоприятным для первого игрока образом. Расстояние фазового вектора до начала координат (по всем четырем координатам) в конечный момент времени равно pk = 0.06224, что говорит о неэффективности приведенной процедуры управления. Рис. 3. Траектория движения управляемого объекта Случай второй. В условиях неточного измерения фазового вектора управление манипулятором осуществляется в форме позиционной процедуры управления с "поводырем". На рис. 4 показана траектория фазового вектора игры в проекции на первые две координаты, в предположении, что второй игрок действует самым неблагоприятным для первого игрока образом. Расстояние фазового вектора до начала координат (по всем четырем координатам) равно pk = 0.00031. В случае, когда второй игрок действует случайно, оно практически равно нулю. Полученные результаты являются приемлемыми. Рис. 4. График движения управляемого объекта при оптимальном действии помехи Заключение В работе численно подтверждено, что процедура управления с поводырем является эффективным способом управления в дифференциальной игре наведения в условиях неточного измерения фазового вектора игры. Этот факт позволил решить задачу возвращения схвата манипулятора на базовую траекторию с заданной степенью точности, в предположении, что его отклонение от базового закона движения в каждый момент времени измеряется с погрешностью.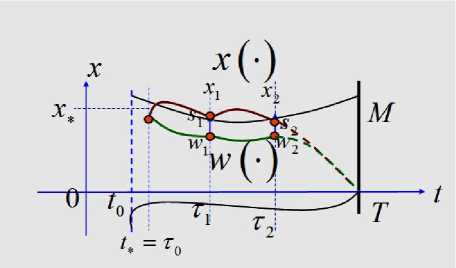

Список литературы Управление с "поводырем" двухзвенным манипулятором с вращательными парами
- Красовский Н.Н., Субботин А.И. Позиционные дифференциальные игры. М.: Наука, 1973. 456 с.
- Лутманов С.В., Попова Е.С. Игровые задачи управления двухзвенным манипулятором с вращательными парами//Проблемы механики и управления: межвуз. сб. науч. тр. Пермь, 2012. Вып. 44. С. 59-73.
- Лутманов С.В., Попова Е.С. Реализация процедуры управления с "поводырем" в одной антагонистической дифференциальной игре двух лиц наведения на целевое множество//Проблемы механики и управления: межвуз. сб. науч. тр. Пермь, 2013. Вып. 45. С. 39-54.
