Влияние конструктивных особенностей на жесткость оборудования, построенного на основе механизмов с параллельными кинематическими цепями

Автор: Смирнов Владимир Алексеевич, Сулацкая Елена Юрьевна
Рубрика: Расчет и конструирование
Статья в выпуске: 33 (166), 2009 года.
Бесплатный доступ
Рассмотрено влияние конструктивных особенностей на жесткость механизма с параллельными кинематическими цепями с шестью степенями. Показано, что наибольшая жесткость соответствует механизму со сдвоенными шарнирами.
Механизм с параллельными кинематическими цепями, жесткость
Короткий адрес: https://sciup.org/147151475
IDR: 147151475 | УДК: 621.865.8
Influence of design philosophy upon rigidity of equipment constructed on the basis of machinery with parallel transmission routes
The article considers the influence of design philosophy upon rigidity of mechanism with parallel transmission routes with 6 degrees. It is shown that the maximal rigidity corresponds to the mechanism with coupled joints.
Текст научной статьи Влияние конструктивных особенностей на жесткость оборудования, построенного на основе механизмов с параллельными кинематическими цепями
Расчеты, оценивающие жесткость конструкции оборудования, построенного с использованием МПКЦ, необходимы как на этапе кинематического синтеза МПКЦ, так и на этапе детальной проработки элементов конструкции. На этапе кинематического синтеза можно проанализировать влияние основных геометрических размеров на жесткость механизма в целом, а также сравнить несколько кинематических схем по жесткости.
Расчеты, необходимые для проектирования сложного оборудования, с достаточной точностью могут быть выполнены только с использованием высокопроизводительных численных методов расчета, реализованных в таких программных продуктах как ANSYS, NASTRAN, ABAQUS, COSMOS и др., основанных на методе конечных элементов.
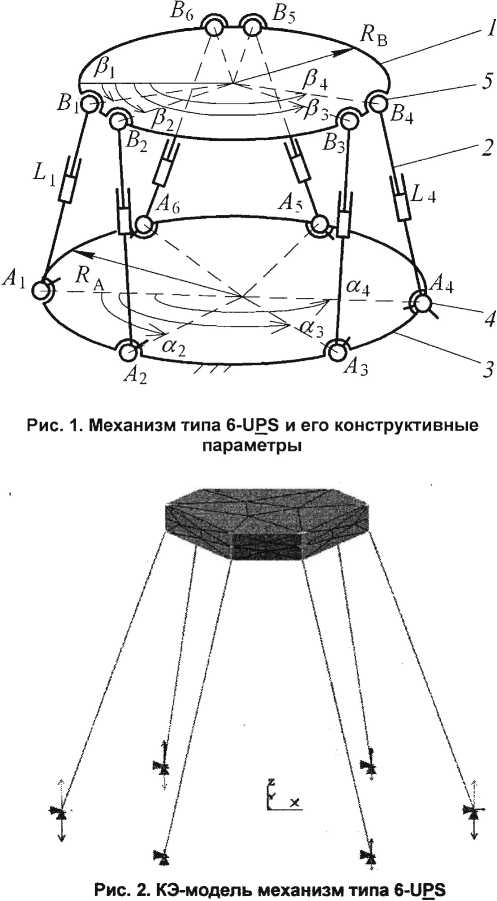
Рассмотрим влияние расположения шарниров основания и платформы на жесткость МПКЦ (рис. 1). МПКЦ представляет собой платформу 1, соединенную посредством шести штанг 2 переменной длины с основанием 3. Соединение основания со штангами осуществляется при помощи кардановых шарниров 4, а с подвижной платформой - с помощью сферических шарниров 5. Штанги в таком МПКЦ испытывают только нагрузки в продольном направлении, т. е. работают только на растяжение-сжатие, изгибные напряжения в них отсутствуют.
Расчет жесткости был проведен в пакете ANSYS. В качестве элемента, используемого для моделирования штанг, был использован элемент LINKS.
Элемент LINKS - трехмерный стержень (элемент фермы). Он может использоваться в различных инженерных задачах: при моделировании ферм, провисающего кабеля, связи, упругого элемента (пружины) и т. п. Трехмерный (3D) элемент стержня имеет одну ось, может воспри- нимать растяжение и сжатие и имеет три степени свободы в каждом узле -перемещения в направлении осей X, Y и Z узловой системы координат. Как стержневой элемент он не имеет свойств изгиба, имеет свойства пластичности, ползучести, радиационного набухания, увеличения жесткости при наличии нагрузок и больших перемещений.
Расчетная конечно-элементная (КЭ) модель механизма, используемая для кинематического синтеза, представлена на рис. 2. Расчет проведен для механизма в положении, при котором платформа горизонтальна, все длины штанг равны и лежат в диапазоне Lmm< L < Lmax (/=1...6). Тестовая сила приложена к центру нижней грани платформы в плоскости, параллельной OXY. Величина и направление прикладываемой силы неизменны.
Таблица демонстрирует относительные (в процентах от минимального значения) смещения точки приложения силы в направлении действия силы в зависимости от углового расположения шарниров платформы. За 100% принято смещение платформы, полученное для МПКЦ, угловые координаты шарниров платформы которого ^ = р2 =30° , р3=р4=150°, Р5=Р6 =270о. Угловые координаты «, шарниров основания А, приняты следующими: cq = 0°, «2 = 60°, «3=120°, а4=180о, «5 =240°, «6 =300°.
Из таблицы видно, что по мере попарного сближения шарниров платформы смещение центра платформы уменьшается, следовательно, жесткость конструкции в выбранном направлении увеличивается; максимальное значение жесткости наблюдается при попарном совмещении шарниров (рис. 3, а).
Влияние углового расположения шарниров платформы на смещение точки приложения силы
|
1 ч |
F / |
Р1=1° |
Р1=5° |
|
|
О----О ' |
О---О |
Рг=59° |
2 о——О 3333,23% |
Р2=55° |
|
Р3 =121° |
Р3 =125° |
|||
|
83 873,72% |
Р4=179° |
Р4=175° |
||
|
Р5 =241° |
р5 =245° |
|||
|
р6 =299° |
р6 =295° |
|||
Расчет и конструирование
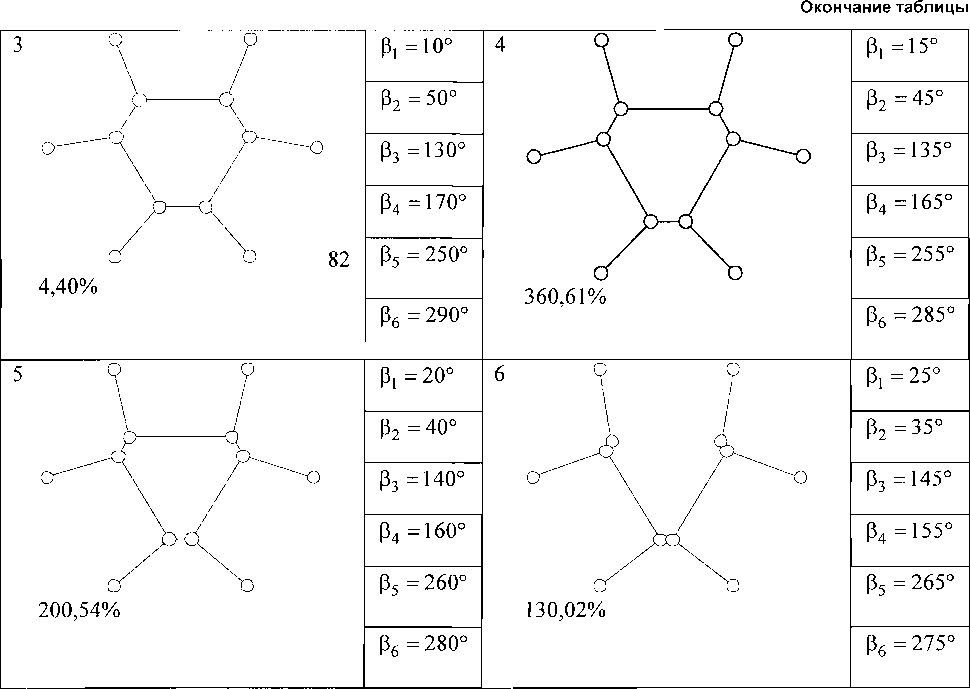
Моделирование влияния угловых координат ccz шарниров основания Az на жесткость конструкции показало аналогичные результаты. Анализ проводился для МПКЦ, угловые координаты Pz шарниров платформы Bz которого приняты следующими: Р^О0, Р2=60°, Р3=120°, Р4 =180°. Р5 = 240°, Р6 = 3 00° . Шарниры основания Az сближались попарно с интервалом 5°.
Жесткость конструкции резко снижается при приближении к положению, при котором угловые координаты шарниров а} = Рг = 0°, сс2 = Р2 = 60°, а3 = Р3 = 120°, а4 = Р4 = 180°, а5 = р5 = 240° , аб = Р6 = 300° (вариант 1). Это объясняется наличием особого положения, возникающего, когда платформа горизонтальна, длины всех штанг одинаковы и штанги лежат на прямых, сходящихся в одной точке [2].
Аналогичные качественные результаты получены при изменении направления тестовой силы F. Точка приложения силы остается неизменной.
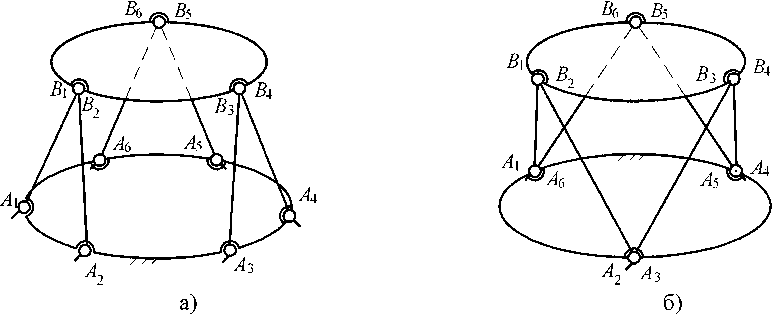
Рис. 3. МПКЦ с различным положением шарниров
Максимальная жесткость соответствует механизму со сдвоенными шарнирами, как показано на рис. 3, б. Однако создание оборудования по данной схеме является практически не достижимым из-за трудностей проектирования сдвоенных шарниров. По сути сдвоенный шарнир представляет собой несколько тел, имеющих 2 или 3 степени свободы и способных вращаться вокруг одной точки (рис. 4, а). Создание такой конструкции шарнира сопряжено не только с конструкторскими, но и с технологическими сложностями. Жесткость и углы качания такого шарнира будут значительно снижены по сравнению с традиционным исполнением.

а) б)
Рис. 4. Конструкции сферических шарниров
Рациональным является конструкция механизма, шарнирные узлы которой попарно сдвинуты на расстояние, обеспечивающее их раздельное размещение на платформе или основании (рис. 4, б). Такое размещение шарниров платформы может соответствовать 5- и 6-му вариантам таблицы.
Список литературы Влияние конструктивных особенностей на жесткость оборудования, построенного на основе механизмов с параллельными кинематическими цепями
- Хант К. Кинематические структуры манипуляторов с параллельным приводом/К. Хант//Конструирование. -1983. -№ 4. -С. 201-210.
- Манипуляционные системы роботов/А.И. Корендясев, Б.Л. Саламандра, Л.И. Тывес и др.; под общ. ред. А.И. Корендясева. -М.: Машиностроение, 1989. -472 с.
