Влияние масс концевых точек на динамику пятимассовой большой орбитальной космической системы цепочечной структуры

Автор: Маланин В.В., Остапенко Е.Н., Репьях Н.А.
Журнал: Вестник Пермского университета. Математика. Механика. Информатика @vestnik-psu-mmi
Рубрика: Механика. Математическое моделирование
Статья в выпуске: 4 (27), 2014 года.
Бесплатный доступ
Приведены результаты исследования динамики свободного орбитального движения пятимассовой большой орбитальной космической системы (БОКС) цепочечной структуры. Рассматривается влияние увеличения масс концевых точек системы на ее динамику. Точки БОКС расположены на дуге полуокружности в вертикальной плоскости транспортирующей системы координат. Для начального мгновенно-поступательного состояния системы дифференциальных уравнений движения установлены особенности движения точек и стержней БОКС на заданном промежутке времени. Предполагается, что длины стержней одинаковы.
Центральное гравитационное поле, большая орбитальная космическая система, транспортирующая система координат
Короткий адрес: https://sciup.org/14729945
IDR: 14729945 | УДК: 629.195.1
An influence of masses of endpoints on dynamics of large five body orbital space systems with chain-like structures
In this paper, a free movement of a large five body orbital space system (LOSS) with a chain-like structure is considered in the carrier coordinate system. An effect of a mass increase of terminal bodies is examined on dynamics of the LOSS. These bodies are located on an arc of a semicircle in a vertical plane of the coordinate system. Characteristics of the LOSS movement are studied on a given time interval. The terminal bodies are modeled as points. It is assumed that the lengths of the rods are the same. Time histories for different LOSS motions were produced by numerical integrations of ordinary differential equations describing evolutions of the system.
Текст научной статьи Влияние масс концевых точек на динамику пятимассовой большой орбитальной космической системы цепочечной структуры
В работах [4–7] приведены результаты исследования динамики свободного орбитального движения больших орбитальных космических систем (БОКС), в том числе системы, состоящей из пяти материальных точек, соединенных шарнирно невесомыми стержнями и образующих четырехзвенную цепочку. В работах [4, 6] для начального мгновеннопоступательного состояния системы, когда пять точек БОКС расположены на дуге окружности в вертикальной плоскости транспортирующей системы координат, численным интегрированием дифференциальных уравнений движения установлены особенности движения точек и стержней БОКС на заданном
*Работа выполнена при финансовой поддержке РФФИ (грант № 14-01-96019).
промежутке времени [ t 0 , T ] . Исследования проводились в предположении, что массы точек равны и длины стержней одинаковы.
Особенностью поведения космических систем рассматриваемого вида является хаотический характер вращательных движений стержней в механической системе с большим числом степеней свободы. На параметры этого движения определяющее влияние оказывают массы точек, длины стержней, нелинейность гравитационного поля и дифференциальных уравнений движения системы и, естественно, начальные условия при численном моделировании.
1. Описание механической системы
Рассматривается движение механической системы S , состоящей из M i ( i = 1,5) материальных тел, соединенных последовательно 4 невесомыми стержнями с длинами
I j ( j = 1,4 ) . Тела принимаются за материальные точки массами m i ( i = 1,5). Точки движутся в плоскости в центральном гравитационном поле. Длины стержней достаточно велики, их размер позволяет отнести систему S к БОКС цепочечной структуры.
Система совершает свободное движение в орбитальной плоскости под действием центральной ньютоновской силы. Для изучения динамики БОКС при численном моделировании принято:
– длины четырех стержней одинаковы и равны l (при этом 4 1 << H , где H - начальная высота точки M 1 над поверхностью Земли);
– для анализа относительного движения введена подвижная поступательно движущаяся система координат Oxy – транспортирующая система координат (ТСК) [1–3] (рис. 1);
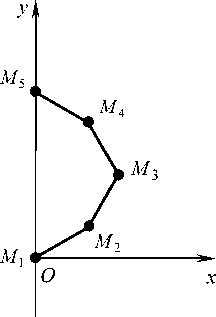
Рис.1. Начальное положение БОКС в ТСК
– начало ТСК совпадает с опорной точкой О , в качестве которой принята первая точка M 1 пятиточечной БОКС;
– начальная скорость опорной точки соответствует ее местной круговой скорости:
стной горизонтали против вектора скорости опорной точки, а ось Oy – по местной вертикали;
– в начальном положении пять точек БОКС расположены на дуге полуокружности в первой четверти ТСК, первая точка – опорная находится в начале координат, пятая – на оси Oy (рис. 1);
– время свободного движения БОКС соответствует двум оборотам системы вокруг опорной точки, что соответствует одному обороту вокруг гравитационного центра.
-
2. Исследование влияния масс концевых точек на движение 5-массовой БОКС в транспортирующей системе координат
В настоящей работе рассматривается влияние увеличения масс концевых точек системы на ее динамику при неизменных, по сравнению с [4, 6], остальных условиях, эволюция положений БОКС рассматривается на том же промежутке времени T .
Приведем результаты анализа движения БОКС в двух случаях.
Первый случай
Массы первой (опорной), второй, третьей и четвертой точек одинаковы, а масса пятой точки в 1,71 раза больше:
т 1 = т 2 = т 3 = т 4 = т , т 5 = 1,71 т ; (1)
На рис. 2, 3 показана общая картина последовательных положений БОКС с шагом T /12 . На рис. 2 от начального положения 1 0 = 0 , до 1 6 = T / 2 , на рис. 3 от 1 6 до
-
1 12 1 .
υ 0
γ M
\ R з + H ’
где R 3 – радиус Земли;
– начальные абсолютные угловые скорости всех стержней нулевые, т.е. БОКС в начальный момент движется мгновенно-поступательно;
– оси Ox и Oy транспортирующей системы координат в начальный момент совпадают с осями орбитальной системы координат опорной точки, т.е. ось Ox направлена по ме-
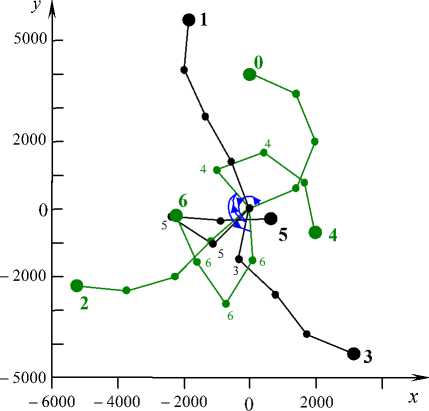
Рис. 2
Решение показывает, что на первом этапе движения при t e [ t 0 , 1 1 ] происходит распрямление начальной дуги, которую образуют точки БОКС. При этом к моменту t 1 намечается изменение знака кривизны средней дуги y
– 2000
– 5000
– 6000 – 4000 – 2000 0 2000 x
Рис. 3
M2M5 , соединяющей точки M2, M3, M4, M5 , и дальнейшее уменьшение радиуса кривизны этой дуги до положения системы в момент t2 . К моменту t3 средняя кривизна дуги M 1M 5 меняет знак по отношению к предыдущему и к моменту t4 снова происходит смена знака средней кривизны дуги M 1M 5 . Состоя- ние системы в моменты t1 , t2 , t3 достаточно близки к соответствующим состояниям [6] для равных масс всех точек БОКС. Но различие есть, оно накапливается, и в момент t4 массивная точка M 5 , приближаясь к опорной точке M 1 , подходит к ней на расстояние в 1,66 раза ближе, чем точка M 5 в [6].
Далее картина движения БОКС существенно отличается от [6]: в то время, когда расстояние от точки M 5 до опорной точки M 1 после убывания к моменту t 5 снова возрастает, и траектория точки M 5 становится к моменту t 6 почти замкнутой, охватывающей опорную точку, участок траектории массивной точки M 5 в моменты t 4 , t 5 , t 6 не охватывает опорную точку M 1 (рис. 2, 4).
На рис. 4–7 приведены формы, которые принимает цепочка пяти точек для моментов t 4, t 5 ,..., t 12 . Эти формы значительно отличаются от [4, 6] и сопровождаются большими изменениями угловых скоростей стержней, соединяющих точки.
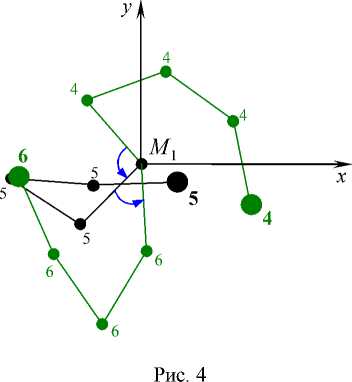
На рис. 4 форма, соответствующая моменту t 5 , говорит о возможности возникновения в цепочке "перехлеста", когда стержни M 2 M 3 и M 3 M 4 , соединенные в средней точке M 3 , складываются, а стержни M 1 M 2 и M 4 M 5 пересекаются. Массивная концевая точка M 5 движется в транспортирующей системе координат почти прямолинейно (параллельно оси Ox ) в направлении орбитального движения опорной точки M 1 , обгоняя ее.
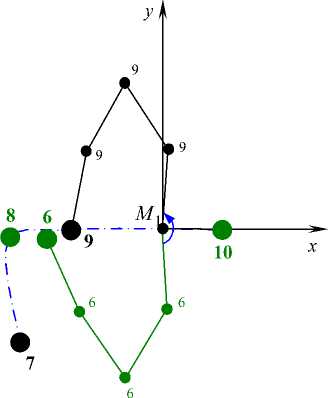
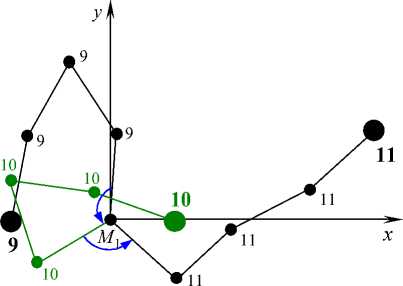
Рис. 7
На рис. 7 форма БОКС в виде «домика» при t 9 складывается, и в момент, когда точка M 5 перекрывает опорную, БОКС принимает форму ромба. Далее цепочка принимает форму t 10 , которая, вытягиваясь, принимает вид t 11 .
Рис. 5
На рис. 5 приведены положения точек системы, близкие к зеркальному относительно оси Ox , в моменты t 6 и t 9 . Фрагмент траектории концевой тяжелой точки M 5 в моменты t 7 , t 8 ,..., t 10 , когда точка M 5 перекрывает опорную точку M 1 , двигаясь в направлении, противоположном орбитальному движению
На рис. 8 показана траектория точки M 5 в ТСК на рассмотренном промежутке времени T . Эта траектория не охватывает опорную точку M 1 .
1 y
M 1 10
5r>4
x
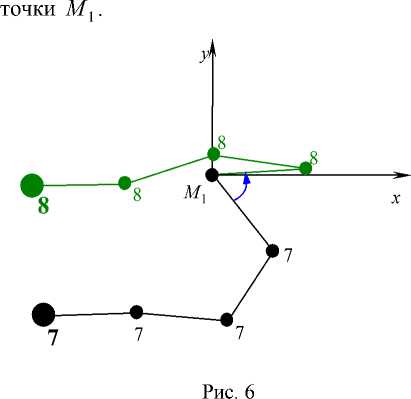
На рис. 6 при переходе из состояния t 7 в состояние t 8 происходит складывание первых двух стержней системы, при этом средняя точка M 3 перекрывает опорную. Стержни M 3 M 4 и M 4 M 5 совершают почти поступательное перемещение из зоны отрицательных значений ординат точек к зоне с положительными значениями в момент t 9 .
Рис. 8
Второй случай
Массы второй, третьей, четвертой и пятой точек одинаковы, а масса опорной точки в 1,71 раза больше:
m 2 = m 3 = m 4 = m 5 = m , m 1 = 1,71 m . (2)
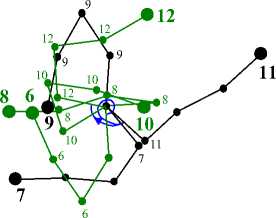
На рис. 9 и 10 показана общая картина последовательных положений БОКС с шагом
T /12. На
1 0 = 0 , до t 12 = T .
рис. 9 от начального положения
1 6 = T /2, на рис. 10 от 1 6 до
пример, пары ( t 1 , t 3 ) ( t 0 , t 4 ) (Рис. 11) и пары ( t 7 , t 8 ) ( t 11 , t 12 ) (Рис. 12).
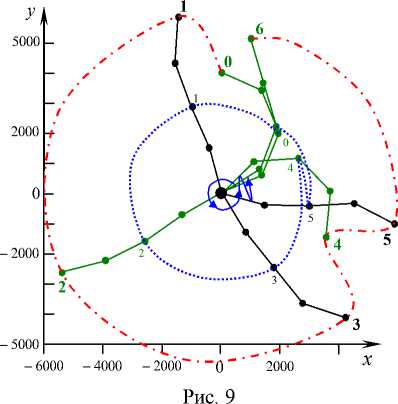
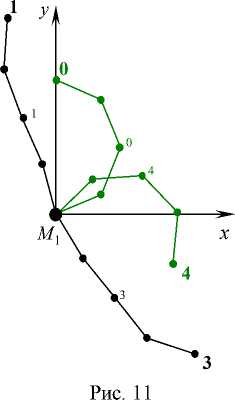
Во втором случае, когда самой массивной является опорная точка M 1 , траектория концевой точки цепочки дважды охватывает опорную (штрихпунктирная линия на рис. 9 и 10), как и в работе [6]. Также на этих рисунках показана траектория средней точки M 3 (точечная линия), которая имеет тот же характер, что и в работе [6].
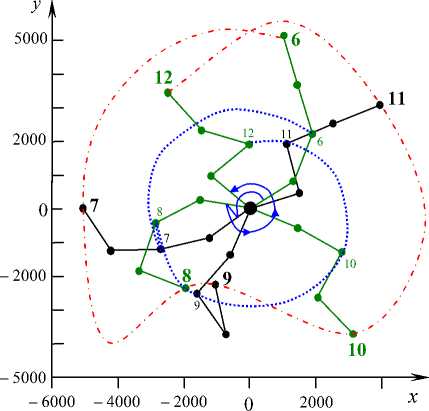
Рис. 10
Можно отметить наличие пар форм цепочки почти симметричных относительно лучей, проходящих через начало координат. На-
Общим свойством движения БОКС в случае (1) и (2) является выпрямление дуги полуокружности начального положения цепочки на промежутке t e [ t 0 , 1 3 ] (рис. 2, 9), при этом происходят незначительные изменения относительных углов и угловых скоростей соседних звеньев цепочки. Плавный характер изменения формы БОКС заканчивается при t = 1 3 в случае (1) и сохраняется до t = 1 7 в
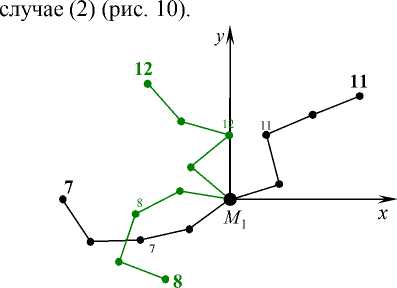
Рис. 12
Заключение
Математическая модель пятимассовой БОКС цепочечной структуры, описанная в данной работе, может быть использована для дальнейшего анализа больших космических систем.
Исследование движения 5-массовой системы проводилось численно с применением пакета Mathematica в предположении равных длин стержней, мгновенно-поступательного начального состояния системы в плоском центральном гравитационном поле. В работе рассмотрено влияние увеличения масс концевых точек системы на ее динамику. Приведено описание последовательных состояний системы в транспортирующей системе координат на промежутке двух оборотов системы вокруг опорной точки.
С использованием пакета Mathematica создана визуализация движения такой 5-мас-совой системы.
Список литературы Влияние масс концевых точек на динамику пятимассовой большой орбитальной космической системы цепочечной структуры
- Белецкий В.В. Очерки о движении космических тел. 3-е изд., испр. и доп. М.: URSS: Изд-во ЛКИ, 2009. 426 с.
- Белецкий В.В., Новикова Е.Т. Об относительном движении связки двух тел на орбите//Космические исследования. 1969. Т.7, № 3. С. 377-384.
- Белецкий В.В., Егоров В.А. Межпланетные полеты с двигателем постоянной мощности//Космические исследования. 1964. Т.2, № 3. С. 360-391.
- Вертипрахов И.А., Остапенко Е.Н., Репьях Н.А. Динамика стержневой большой орбитальной космической системы цепочечной структуры//Вестник Пермского университета. Серия Математика, механика, информатика. 2012. Вып. 4(12). С. 42-47.
- Курская К.Н., Маланин В.В., Остапенко Е.Н. и др. Динамика больших орбитальных космических систем (БОКС)//Проблемы механики и управления. Нелинейные динамические системы: межвуз. сб. науч. тр./Перм. гос. нац. иссл. ун-т. Пермь, 2012. Вып. 44. С. 42-48.
- Маланин В.В., Остапенко Е.Н., Репьях Н.А. Свободное движение пятиточечной стержневой большой орбитальной космической системы цепочечной структуры в транспортирующей системе координат//Вестник Пермского университета. Серия Математика, механика, информатика. 2013. Вып. 3(22). С. 59-62.
- Талипов И.Ф., Репьях Н.А. Исследование движения твердого тела в поле приливных сил гравитации//Вестник Пермского университета. Серия Математика, механика, информатика. 2014. Вып. 3(26). С. 76-81.
