Всенаправленные мобильные роботы

Автор: Ли Чжочэн, Цзо Лян, Ли Цзяси, Лю Цзыюй
Журнал: Международный журнал гуманитарных и естественных наук @intjournal
Рубрика: Технические науки
Статья в выпуске: 5-2 (68), 2022 года.
Бесплатный доступ
Был проведен анализ различных видов и подходов к решению задачи всенаправленного движения мобильного робота. Проведен обзор и анализ существующих всенаправленных роботов. Был описан метод управления четырехколесного робота с колёсами Mecanum.
Мобильные роботы, беспилотные средства
Короткий адрес: https://sciup.org/170193545
IDR: 170193545
Omnidirectional mobile robots
The analysis of various types and approaches to solving the problem of omnidirectional movement of a mobile robot was carried out. The review and analysis of existing omnidirectional robots is carried out. A method of controlling a four-wheeled robot with Mecanum wheels was described.
Текст научной статьи Всенаправленные мобильные роботы
Мобильный робот - это машинное устройство, выполняющее работу автоматически. Они могут управляться человеком, выполнять заранее запрограммированные программы или действовать в соответствии с программой принципов, разработанных с помощью технологии искусственного интеллекта. Его задача - помочь человеку или заменить его труд, например, на производстве, в строительстве или на опасных работах.
С широким использованием мобильных роботов в современном производстве и военных сферах, возрастают требования к мобильности мобильных роботов, всенаправленные мобильные роботы могут самостоятельно свободно передвигаться в ограниченном пространстве и обладают лучшей проходимостью и мобильностью [1], чем традиционные роботы [2].
Чтобы мобильный робот мог двигаться в любом направлении в небольшом пространстве, необходимо выбрать колес для робота. Ниже перечислены способы достижения всесторонней мобильности.
Омни-колеса (рис. 1.) или поли-колеса, схожие с колесами Mecanum, являются колесами с маленькими дисками (называемыми роликами) на их окружности, расположенной перпендикулярно направлению вращения. Его внешний круг также равномерно распределен маленькими спицами, которые могут свободно вращаться, но расположены перпендикулярно оси вращения колеса. Для достижения плавного всенаправленного движения внешний обод широко используемого в настоящее время всенаправленного колеса Омни-колеса оснащен 2 или более рядами маленьких спиц. Роботы, использующие всенаправленные Омни-колеса, используют как минимум 3 колеса для достижения всенаправленного движения. Поскольку всенаправленное колесо Омни установлено под определенным углом к системе координат робота, при движении будет определенная потеря эффективности, а вертикальные маленькие спицы не могут двигаться в волнистой среде.

Рис. 1. Литое пластиковое омни-колесо
Китайские ученые разработали всенаправленную мобильную машинную платформу Back [3], которая была использована для участия в соревнованиях по футболу среди роботов. Для достижения всенаправленной мобильности робот использует колеса Omni-wels, с одним рядом всенаправленных колес, как показано на рисунке 2. Робот был разработан таким образом, чтобы его конструкция была как можно легче. В результате общая масса составляет всего 3,5 кг, максимальное ускорение при движении – 5,9 м/с2, а максимальная скорость – 2 м/с. Всенаправленная колесная формула робота представляет собой равносторонний треугольник. Робот показан на рисунке 2.
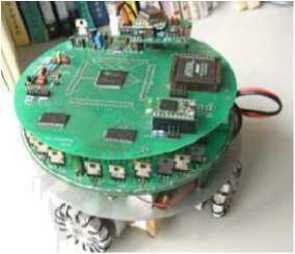
Рис. 2. Всенаправленный мобильный робот, разработанный китайскими учеными
К вращающейся поверхности основного колеса прикреплено дополнительное, преимущественно бочкообразной формы вспомогательное колесо, ось вращения которого находится под прямым углом к оси вращения основного колеса. Если главное колесо приводится в движение, вспомогательное колесо блокируется и действует как рабочая поверхность для главного колеса. Если привод остановлен и транс- портное средство движется в другом направлении, например, ко второму универсальному колесу, соединенному под прямым углом, вспомогательное колесо вращается таким образом, что сопротивление трения колеса сводится к минимуму. Конструкция этой треугольной компоновки позволяет быстро перемещаться практически под любым углом к направлению вращения основного колеса.
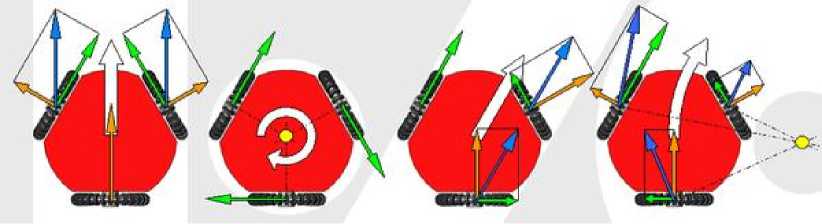
Рис. 3. Роботы с всенаправленным приводом в разные стороны движения
Поворотный модуль
Кроме того, Университет Флориды разработал всенаправленного мобильного робота. Робот был разработан с использованием модульного подхода к проектированию, разделив его на секцию привода, сек- цию шасси и секцию амортизации. Мобильный робот использует ортогональный механизм рулевого управления, который позволяет осуществлять всенаправленное движение. Робот показан на рисунке 4.

Рис. 4. Коммерческий привод и поворотный модуль
Такой модуль поворотного привода представляет собой интегрированный узел, содержащий классическое приводное колесо, которое также может активно вращаться и выравниваться вокруг своей вертикальной оси. Это решение является наиболее технически сложным, но при этом обладает очевидными преимуществами. Одно большое ведущее колесо также может работать на неровной или грязной поверхности или даже на небольших препятствиях (кабели, стыки) без пробуксовки, что может привести к проблемам с одометром. Поскольку все колеса являются ведущими и активно управляемыми, статическое бронирование во мно- гих случаях безвредно и не приводит к потере контроля над автомобилем. Автомобили с модулями наклона и рулевого управления могут двигаться во всех направлениях, но не всегда плавно, так как перед началом движения может потребоваться кратковременное выравнивание колес.
Колесо Mecanum впервые было использовано в США [4] для складских погрузчиков в военной промышленности, как показано на рисунке 5. Немецкая компания MIAG использовала колесный мобильный робот Mecanum в качестве платформы для разработки робота для монтажа двигателя для гражданских самолетов.

Рис. 5. Мобильный робот с колесами Mecanum
Колесо Mecanum – это раннее исследованное и наиболее типичное всенаправленное колесо. Есть много барабанных роликов, распределенных по окружности корпуса колеса. Непрерывность ролика и ролика могут свободно вращаться, ось ролика и ось колесо обычно 45°.
Каждое колесо Mecanum имеет 3 степени свободы движения. Во-первых, колесо вращается вокруг своей оси, приводимой в движение двигателем, во-вторых, каток вращается вокруг своей оси, приводимой в действие трением, а в-третьих, колесо вращается вокруг точки контакта колеса с землей. Когда двигатель приводит колесо во вращение, колесо движется обычным образом в направлении, перпендикулярном приводному валу, в то время как ролики по периферии колеса могут свободно вращаться вдоль своих соответствующих осей.
Колесо Mecanum имеет компактную структуру и гибкое движение.Комбинация 3 или более колес Mecanum может синтезировать момент в любом направлении за счет взаимодействия скорости вращения и управления между колесами, тем самым заставляя платформу двигаться в любом направлении для реализации движение в плоскости Полный диапазон движения. Однако из-за косого распределения роликов колеса Mecanum направление силы на роликах не соответствует направлению движения колес, ролики по окружности корпуса колеса подвергаются большим осевым усилиям, ролики легче повредить, и ролики обычно скользят при движении колес. Это не чистое качение, и ролики легко изнашиваются. Точка контакта колеса с землей периодически перемещается по цилиндрической поверхности, которая подвержена вибрации на неровном грунте, а ее обработка и изготовление относительно сложны, но с повышением уровня технологии изготовления эти существующие проблемы могут быть решены. решается в какой-то степени.
По сравнению с другими типами всенаправленных колес, колеса Mecanum в основном обладают следующими характеристиками:
Хорошая грузоподъемность;
Простое управление движением, простота реализации системы управления;
Конструкция механизма колесной пары проста, колесная пара имеет определенную ширину и движение относительно плавное.
Метод управления робота с колёсами Mecanum
Основная причина способности колеса Mecanum двигаться по диагонали заключается в том, что ось пассивно катящихся роликов находится под углом 45 градусов к оси ступицы, что приводит к общему направлению движения колеса Mecanum вдоль оси роликов, когда двигатель приводит колесо во вращение.
Силы трения, действующие на ролики со стороны земли, подразделяются на трение качения и статическое трение. Трение качения заставляет валик вращаться, что является неэффективным движением; статическое трение заставляет валик двигаться относительно земли, при этом валик "застревает" на ступице, тем самым приводя в движение все пшеничное колесо вдоль оси валика (т.е. ступица вращается против часовой стрелки, направление движения - 45° вверх влево; ступица вращается по часовой стрелке, направление движения - 45° вниз вправо). Таким образом, изменяя угол между осью ролика и осью ступицы, можно изменить фактическое направление движения пшеничного колеса.
Дальнейший анализ показывает, что именно статическая сила трения приводит в движение Пшеничное колесо, которая разлагается по осям системы координат колеса для получения радиальной (продольной) составляющей вдоль ступицы колеса и осевой (поперечной) составляющей вдоль ступицы колеса.
Изменяя скорость вращения четырех колес робота, можно добиться полного диапазона движений. Например:
-
- Движение всех 4 колес в одном направлении и с одинаковой скоростью может привести к движению вперед/назад, поскольку векторы продольной силы складываются, а векторы поперечной силы аннулируют друг друга.
-
- Использование двух колес для движения в одном направлении (оба с одинаковой скоростью), а другого - в противоположном. Это приводит к повороту автомобиля в исходное положение, поскольку боковые векторы компенсируют, а продольные векторы создают крутящий момент на
центральной вертикальной оси вокруг автомобиля.
-
- Для движения вбок диагональные колеса вращаются в одном направлении с одинаковой скоростью, а два других диа-
- Поперечный вектор увеличивается, а продольный вектор уменьшается.
Общая модель управления роботом показана на следующей схеме (рис. 6).
гональных колеса - напротив друг друга.
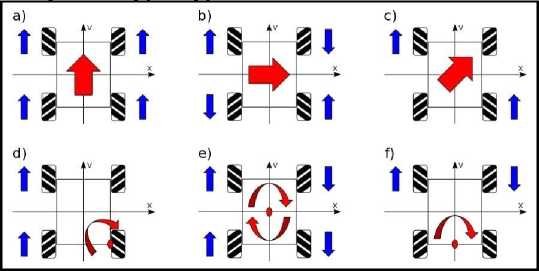
Рис. 6. Модель управления робота с колёсами Mecanum
Заключение. Был проведен анализ различных видов и подходов к решению задачи всенаправленного движения мобильного робота. Был описан метод управления движения. Всенаправленные мобильные роботы имеют широкие перспективы применения.
Список литературы Всенаправленные мобильные роботы
- Ye Changlong, Ma Shugen. Development of an omnidirectional mobile platform // Changchun, China: Proceeding of the 2009 庄EE International Conference on Mechatronics and Automation, 2009. - P. 1111-1115.
- Lins Barreto S.J.C, Scolari Conceicao A.G, Design and implementation of model-predictive control with friction compensation on an omni-directional mobile robot // IEEE Transactions on Mechatronics. - 2014. - №19 (2). - P. 467-476.
- Muir P.F, Neuman C P. Kinematic Modeling for Feedback Control of an Omnidirectional Wheeled Mobile Robot // Robotics & Automation IEEE International Conference on. IEEE, 1987. - P. 540-545.
- Damoto R, Cheng W, Hirose S. Holonomic omnidirectional vehicle with new omni-wheel mechanism // IEEE International Conference on Robotics & Automation. IEEE, 2001. - P. 773-778.
