Зависимость первичной стабильности дентального имплантата от направления окклюзионной нагрузки

Автор: Дашевский И.Н., Шушпанников П.С.
Журнал: Российский журнал биомеханики @journal-biomech
Статья в выпуске: 3 (85) т.23, 2019 года.
Бесплатный доступ
Практика дентальных имплантологов свидетельствует о том, что косая нагрузка на имплантат опаснее вертикальной. Особое значение исследование системы «имплантат - челюсть» под действием косой нагрузки имеет при изучении первичной стабильности дентальных имплантатов, когда остеоинтеграция еще не произошла и на интерфейсе «кость - имплантат» нет сцепления. Повреждающее воздействие чрезмерных нагрузок при этом связано с опасностью возникновения под их влиянием избыточных микродвижений (взаимных смещений ответных точек) на интерфейсе «кость - имплантат», что ведет к нарушению процесса остеоинтеграции. На простейшей модели дентального имплантата с резьбой квадратного профиля рассмотрено влияние угла наклона нагрузки на первичную стабильность имплантата в челюсти. Расчеты проводились методом конечных элементов в пакете ANSYS . Приведены графики изменения микроподвижности вдоль интерфейса «кость - имплантат», даны таблицы величин и локализаций максимумов микродвижений и графики их зависимости от угла нагружения. Показано, что для неинтегрированных имплантатов переход от вертикального нагружения к горизонтальному приводит к резкому падению их стабильности, что при достаточно высоких окклюзионных нагрузках может способствовать нарушению остеоинтеграции.
Биомеханика, дентальные имплантаты, первичная стабильность, моделирование, косая нагрузка, метод конечных элементов
Короткий адрес: https://sciup.org/146282134
IDR: 146282134 | УДК: 539.3 | DOI: 10.15593/RZhBiomeh/2019.3.05
Dependence of primary stability of dental implant on the direction of the occlusal load
Dental implantology practice shows that oblique load on the implant is more dangerous than the vertical one. Of particular importance is the study of the implant-jaw system under oblique load studying the primary stability of dental implants, when osseointegration has not yet occurred and there is no adhesion at the bone-implant interface. The damaging effect of excessive loads in this case is associated with the danger of superfluous micromotions on the bone-implant interface (mutual displacements of corresponding points) arising under their action, which leads to disruption of the osseointegration process. On the simplest model of a dental implant with a square thread profile, the influence of the load tilt angle on the primary stability of the implant in the jaw is examined. Calculations are carried out by the finite element method in the ANSYS package. Graphs of changes in micromotion along the bone-implant interface are presented, tables of magnitudes and localizations of micromotion maximums and graphs of their dependence on the loading angle are given. It is shown that for non-integrated implants, transition from vertical to horizontal loading leads to a sharp decrease in implant stability, which at sufficiently high occlusal loads impairs osseointegration.
Текст научной статьи Зависимость первичной стабильности дентального имплантата от направления окклюзионной нагрузки
В дентальной имплантологии хорошо известно, что косая нагрузка на имплантат опаснее вертикальной [4] (то же справедливо и для нативных зубов [12]). Имеется и ряд публикаций, касающихся расчета напряженно-деформированного состояния челюсти либо ее фрагментов с имплантатами под действием наклонной нагрузки [6‒9, 11, 13, 15, 17, 22]. Большинство из них посвящено остеоинтегрированным (сросшимся с костью) имплантам. Однако особое значение исследование системы «имплантат – челюсть» под действием косой нагрузки имеет при изучении первичной стабильности дентальных имплантатов, когда остеоинтеграция еще не произошла и на интерфейсе «кость ‒ имплант» нет сцепления [21, 14, 16‒20, 23]. Повреждающее воздействие чрезмерных нагрузок при этом связано с опасностью возникновения под их влиянием избыточных микродвижений (взаимных смещений ответных точек) на интерфейсе «кость – имплант», что ведет к нарушению процесса остеоинтеграции.
В работах [1, 2] на минимальной модели имплантатов в челюсти было рассмотрено влияние на первичную стабильность имплантата и микродвижения на интерфейсе характеристик резьбы при вертикальной нагрузке. В настоящей работе на той же модели изучается влияние на микроподвижность угла наклона нагрузки.
Постановка задачи
В качестве базового расчетного варианта был принят тот же, что и в [1, 2], но здесь сила P той же абсолютной величины образует с вертикалью угол α (α = 30°, 45° и 90°). Поэтому, в отличие от [1, 2], рассматриваемая задача не является осесимметричной (но все еще обладает одной плоскостью симметрии). Имея в виду возможную экспериментальную проверку, краевые условия поставили аналогично работе [3]: образец (цилиндр из кости с ввинченным имплантатом) как бы вставлен в жёсткий гладкий стакан (обойму), дно образца приклеено к стакану. Длина и диаметр обоймы приняты соответственно L = 30 мм, D = 20 мм [3]. Сводка всех использованных значений параметров базового расчетного варианта приведена ниже:
|
E , ГПа |
ν |
l , мм |
d , мм |
p , мм |
h , мм |
w , мм |
L , мм |
D , мм |
P , Н |
α, град |
||
|
титан |
кость |
титан |
кость |
|||||||||
|
110 |
1 |
0,3 |
0,3 |
8 |
4 |
1 |
0,2 |
0,2 |
30 |
20 |
700 |
0, 90, 45, 30 |
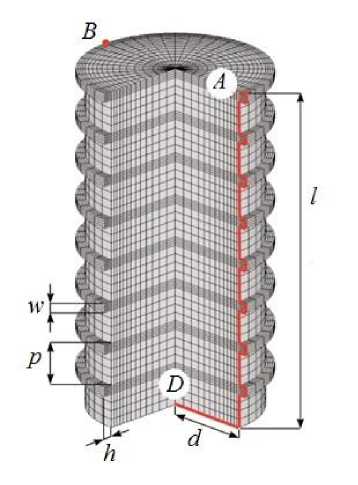
Здесь E , ν – модуль Юнга и коэффициент Пуассона, l , d – габариты импланта (соответственно длина и диаметр); p , h , w – характеристики резьбы: соответственно шаг (период) p ( pitch ), глубина (высота) h и ширина основания зубца (нитки резьбы) w . Профиль резьбы был принят квадратным, поскольку в [1, 2] было показано, что в случае вертикальной нагрузки именно он давал минимальные микродвижения на интерфейсе. На интерфейсе «имплантат – кость» задавалось условие скольжения.
а
б
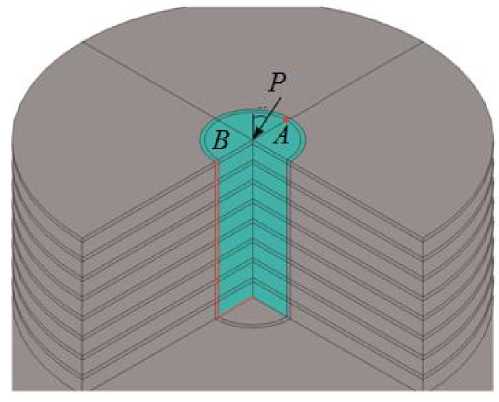
Рис. 1. Нагрузка на имплантат и точка максимальной микроподвижности A ( а ); общий вид импланта с четвертным вырезом ( б )
Расчёты выполнялись с использованием метода конечных элементов в программном комплексе ANSYS (версия 15.0). При построении конечно-элементной сетки использовались билинейные восьмиузловые конечные элементы в форме прямоугольного параллелепипеда. Вследствие наличия в задаче плоскости симметрии разбиению подлежала только часть (половина) модели, ограниченная этой плоскостью. Общее число элементов, использованных при разбиении, приблизительно равнялось 200 000. Для моделирования контакта между костью и имплантатом использовался метод штрафа.
Жесткость (модуль Юнга) имплантата на два порядка больше жесткости кости. Поэтому при действии на верхний торец имплантата горизонтальной силы имплантат практически как твердое тело наклоняется и поворачивается вокруг некоторой точки вблизи своего нижнего торца, называемой центром сопротивления [5]. При этом с одной (лицевой) стороны имплантат будет вдавливаться в кость (и здесь величины микродвижений будут минимальны – точка B ), а с другой (тыльной) – отстанет от кости – и здесь микродвижения будут максимальны (точка A ).
Наибольший интерес представляют места и величины максимальных микродвижений, поэтому в качестве фокусной точки были выбраны точка A (рис. 1), отвечающая максимуму микродвижений в определяемом ею поперечном сечении имплантата, и соответствующие этой точке вертикальное сечение и путь AD (рис. 1). Были проведены расчеты нормальной и тангенциальной компонент, а также модуля полного вектора микродвижений | u *| на интерфейсе вдоль пути AD и аналогичного пути BD .
Результаты расчетов и их обсуждение
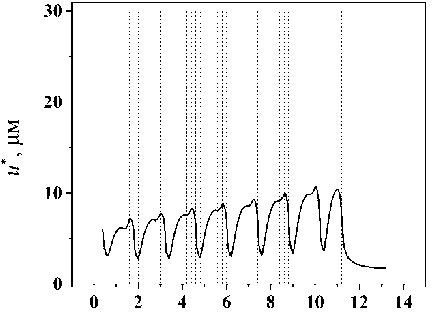
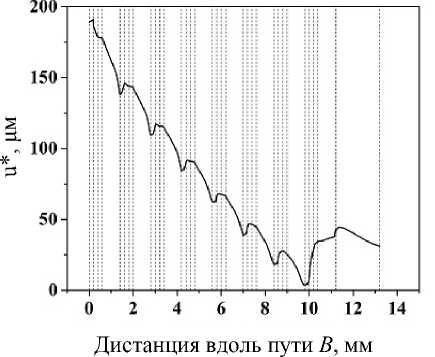
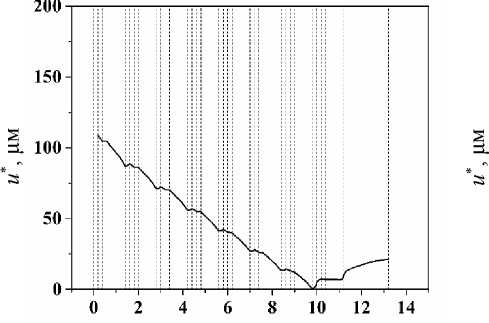
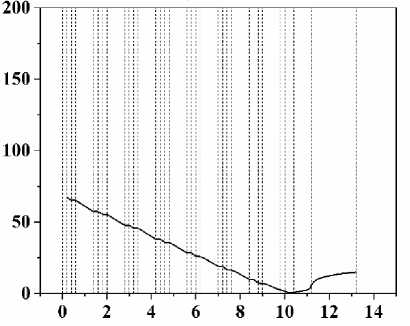
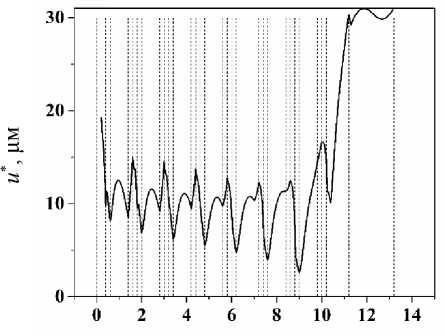
На рис. 2, а‒г представлены графики | u *| вдоль AD соответственно для α = 0°, 90°, 45°, 30°. На рис. 2, д для сравнения приведен график | u *| вдоль BD для α = 90°. Здесь первый штриховой столбик – верхняя грань зубца (нитки резьбы), второй столбик – боковая грань, третий – нижняя грань.
Прежде всего из сравнения рис. 2, б и 2, д видно, что микродвижения в точке B на порядок меньше, чем в точке A . Далее, из практики хорошо известно, что главные проблемы (вплоть до резорбции костной ткани) чаще всего возникают наверху имплантата, в «пришеечной» области. Полученные расчетные результаты могут служить возможным объяснением такого явления: из графиков 3, а‒г видно, что при вертикальной нагрузке максимальные перемещения возникают в апексной зоне, а при горизонтальной и косой нагрузке – наверху имплантата, при этом микродвижения при горизонтальной нагрузке на порядок больше, чем при вертикальном нагружении. Тот факт, что горизонтальные микродвижения больше вертикальных, отражает меньшую жесткость конструкции при горизонтальном нагружении в сравнении с вертикальным, что, в свою очередь, обусловлено геометрически.
Далее известно [14, 21], что лишь чрезмерная микроподвижность прямо связана с нарушением остеоинтеграции и формированием волокнистой инкапсуляции. Согласно [21] допустимый порог микродвижений лежит между 50 и 150 мкм: при | u *| < 50 мкм обеспечена остеоинтеграция, при | u *| > 150 мкм всегда происходит фиброинтеграция, при 50 мкм < | u *| < 150 мкм результат зависит от других (дополнительных) факторов. В наших расчетах значения микродвижений при изменении угла нагрузки от 0° (вертикальная) до 90° (горизонтальная) менялись больше чем на порядок (от 10‒12 до 180 мкм) и таким образом переходили из диапазона остеоинтеграции через промежуточную зону в область фиброинтеграции. Впрочем, надо оговориться, что принятые значения нагрузки близки к экстремальным [4] и, следовательно, в норме возникают редко. Считается, что типичные значения нагрузки P ~ 200 Н [4, 10], а при таких усилиях микродвижения будут примерно в 3,5 раза меньше, т.е. около 50 мкм, что, тем не менее, лежит на границе гарантированной остеоинтеграции.
Косая нагрузка представляет собой комбинацию вертикальной и горизонтальной нагрузок. Поскольку перемещения от вертикальных нагрузок на порядок меньше, чем от горизонтальных, при не слишком малых углах α ими можно пренебречь и учитывать лишь перемещения от горизонтальных усилий, которые равны P → = P sin α.
Дистанция вдоль пути A , мм а
б
Дистанция вдоль пути A , мм
в
Дистанция вдоль пути B , мм
г
Дистанция вдоль пути A , мм
д
Рис. 2. Изменение абсолютной величины микродвижений на интерфейсе «кость ‒ имплантат» вдоль пути AD при α = 0° ( а ), 90° ( б ), 45° ( в ), 30° ( г ), то же для BD α = 90° ( д ), w = 0,2 мм; h = 0,2 мм; p = 1,0 мм
При изменении силы P площадки контакта будут меняться, и таким образом задача нелинейна по P . Если эта нелинейность невелика, то график зависимости u (sin α) должен быть близок к прямой.
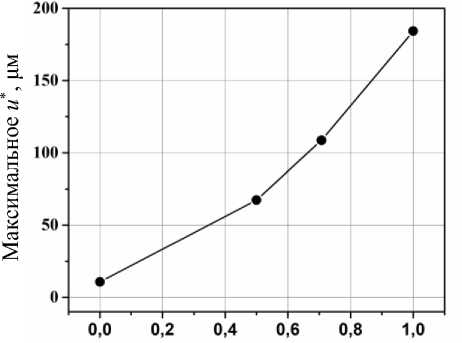
В таблице приведены значения максимальных относительных перемещений (микродвижений) на интерфейсе в зависимости от угла приложения нагрузки, а на рис. 3 ‒ те же данные показаны графически. Видно, что обе зависимости ( u (α), u (sin α)) существенно нелинейны, однако, в отличие от первой, график второй не имеет точек перегиба (сохраняет знак кривизны).
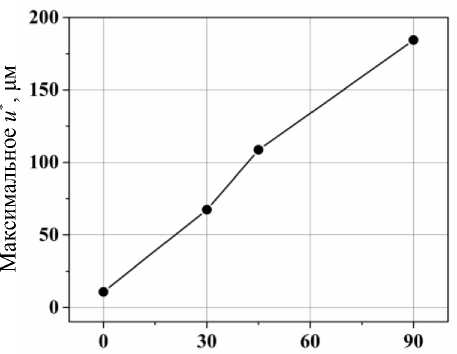
Максимальные микродвижения на интерфейсе «кость – имплант» при разных углах нагрузки
|
Направление нагрузки, град (угол α к вертикали) |
sin α |
Максимум перемещений, мкм |
Положение максимума, (виток резьбы) |
|
00 |
0 |
10,71 |
На последнем |
|
30 |
0,5 |
67,36 |
На первом (шейка) |
|
45 |
V2t2 |
108,65 |
На первом (шейка) |
|
90 |
1 |
184,34 |
На первом (шейка) |
α, град sin α
Рис. 3. Зависимость максимальных значений микродвижений на интерфейсе «кость ‒ имплантат» от угла нагружения
Для того чтобы лучше понять полученный результат, дадим для смещений имплантата оценку на основе простейшей качественной плоской модели (рис. 4), в которой будем считать, что имплантат – жесткий гладкий стержень, а кость будем описывать как винклеровский слой.
Как уже было отмечено выше, при действии на верхний торец имплантата горизонтальной силы имплантат практически как твердое тело наклоняется и поворачивается вокруг некоторой точки вблизи своего нижнего торца, называемой центром сопротивления. Такой поворот описывается соотношением u(y) = k(y ‒ y0), где y – ордината, отсчитываемая от нижнего торца имплантата; u – смещение точек стержня по горизонтали (оси x); y0 – центр сопротивления; k – тангенс угла поворота. Две неизвестные y0 и k определяются из двух уравнений баланса: сил и моментов. Для расстояния между имплантатом и жесткой стенкой введем обозначение s D - d о =------.
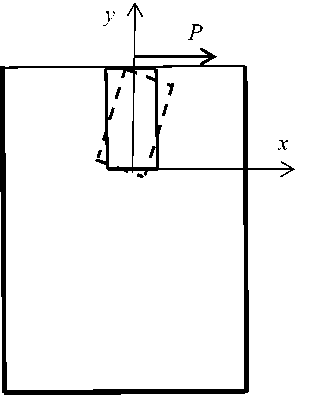
Рис. 4. Поворот имплантата под действием на его верхний торец горизонтальной силы P
Тогда уравнение баланса сил даст
l
l
l
P = J N ( y ) dy = J о Sdy = dE J k
y - y 0
δ
dl dy = kE- (y - y 0) dy =
δ0
1t d I l = kE— -
-
5 ( 2
yol | = kE — 1 1 - 2 y 0 | , P = 0 25 I l )
2 P δ
kEdl 2
= 1 - 2 y = 1 - 2 y 0.
Из уравнения баланса моментов
l
l
I 3
Pl = f N ( y ) ydy = kE- R y - y o ) ydy = kE- --y 0 0 3 00 3 ( 3
—
2 7
,
P = kE —
2 y 0
— — ——
23 I 3 l
2Pδ 2 y 2
kEdl 2 = 3 l " 3
- y 0 ,
2 1 2 1 1 2 P δ 6 P δ
1 -2yn = yn, yn = -, P == -, k ==-,
0 3 0 0 3 3 3 3 PEdl2
ил и M A 6P5 I/ 11
umax = u (l) = k (y - y ) , = k (l - y0) =---7 l — = max 0мil 0м Edl21 3 i u || P, E, l, d, δ
(в конечно-элементной модели есть еще ν, габариты обоймы, параметры резьбы).
В силу линейности и из качественных соображений
P 5 15
u--, u ~ 5, u — —— u.
E lEl
Далее по размерности d может войти единственным образом – в знаменатель, и с точностью до числового множителя получим, как и в (1),
P 5 1
u----=.
E l d Eld
Конечно, все эти качественные формулы малопригодны для оценки реальных величин интересующих параметров. Их ценность в том, что они приближенно (в тенденции), зато в явном виде показывают характер влияния некоторых основных параметров на нужные величины. Здесь оценки были проведены для перемещений и микродвижений, но то же можно сделать и для напряжений.
Отметим, что принятое для δ значение (δ = 8 мм) соответствует стабильности (перемещениям) в щечно-язычном направлении либо перемещениям одиночного импланта в медиально-латеральном направлении в отсутствие смежных зубов; при проведении подобных расчетов и оценок на практике принимаемые значения параметров должны отвечать конкретной ситуации.
Выводы
Изменение направления действия силы на имплантат от вертикального к горизонтальному в отсутствие сцепления на интерфейсе «кость – имплантат» (при немедленном нагружении, при неполной остеоинтеграции) приводит к драматическому – больше чем на порядок – росту микродвижений (взаимных смещений ответных точек) на интерфейсе и перемещению их максимума с апекса на шейку имплантата. Если действующие при этом окклюзионные нагрузки достаточно велики, существует опасность возникновения на интерфейсе чрезмерных микродвижений, что может привести к нарушению остеоинтеграции, в особенности в пришеечной зоне импланта.
Благодарности
Работа выполнена по теме государственного задания (№ госрегистрации АААА-А17-117021310386-3) и при частичной поддержке грантов РФФИ №17-08-01579 и № 17-08-01312.
Список литературы Зависимость первичной стабильности дентального имплантата от направления окклюзионной нагрузки
- Дашевский И.Н., Шушпанников П.С. Влияние профиля резьбы на первичную стабильность дентальных имплантатов // Методы компьютерной диагностики в биологии и медицине - 2017. Материалы Всерос. школы-семинара. - Саратов: Саратовский источник, 2017. - С. 133-136.
- Дашевский И.Н., Шушпанников П.С. Влияние характеристик резьбы на первичную стабильность дентальных имплантатов // Российский журнал биомеханики. - 2018. - Т. 22, № 3. - С. 361-377.
- Ерошин В.A., Джалалова М.В. Напряженно-деформированное состояние биомеханической системы имплантат - упругое основание // Российский журнал биомеханики. - 2012. - Т. 16, № 3. - С. 82-95.
- Миш К.Е. Ортопедическое лечение с опорой на дентальные имплантаты. - М.: Рид Элсивер, 2010.
- Наумович С.А., Ивашенко С.В., Босяков С.М., Крушевский А.Е. Биомеханика системы зуб -периодонт - костная ткань. - Минск, 2009.
