Зондирование среды строб- импульсом источника малой мощности

Автор: Полканов Ю.А.
Журнал: Доклады независимых авторов @dna-izdatelstwo
Рубрика: Техническая оптика
Статья в выпуске: 6, 2007 года.
Бесплатный доступ
В настоящий момент лазерные системы зондирования атмосферы в большинстве своем предполагают использование мощных импульсных лазеров, а регистрация рассеянного от среды сигнала происходит с определенным шагом дискретизации соответствующим заданному пространственному разрешению. Причем увеличение дальности зондирования приводит к экспоненциальному росту мощности излучения, переходу к регистрации в режиме счета фотонов, вызывает трудно учитываемые эффекты многократного рассеяния или требует использования сложных методов расширения динамического диапазона приемных устройств. Предлагается качественно иной подход, который позволяет избежать многих побочных эффектов. Для повышения точности восстановления характеристик среды по регистрируемому сигналу предлагается проводить восстановление средних значений таких характеристик на участках соизмеримых с длиной трассы зондирования, а высокого разрешения достигать обработкой данных пар участков отличающихся по длине на заданный шаг дискретизации. Дополнительные возможности может дать использование маломощного непрерывного узконаправленного источника излучения (например, белого света), когда время прерывания его излучения равно длительности импульса обычного лидара (порядка 10-8 с), а частота соотноситься со временем распространения излучения на трассе где многократным рассеянием можно пренебречь.
Короткий адрес: https://sciup.org/148312148
IDR: 148312148
Текст научной статьи Зондирование среды строб- импульсом источника малой мощности
Повышение точности лидарных измерений имеет внешние ограничения, обусловленные как временной изменчивостью самой среды по трассе зондирования, так и общего ее метеорологического состояния в зоне зондирования. В этих условиях попытки уменьшить погрешность измерений сигнала путем увеличения строба регистрации сигнала или накоплением сигнала в серии измерений блокируются сопутствующим ухудшением пространственно-временного разрешения. Такое противоречие, требует для своего разрешения качественно иной организации дискретных отсчетов сигнала рассеяния, когда интервал регистрации отдельного отсчета сигнала прямо не связан с требуемым пространственно-временным разрешением. Предлагается использовать интервалы регистрации отсчетов сигнала, временная протяженность которых соизмерима со временем прохождения зондирующим излучением трассы зондирования.
Формирование таких отсчетов можно проводить на основе стандартной последовательности дискретных отсчетов сигнала одинаковой длительности (стробов). Для повышения точности восстановления характеристик среды по регистрируемому сигналу, в дальнейшем предлагается проводить восстановление средних значений таких характеристик на участках соизмеримых с длиной трассы зондирования при аналогичной организации стробов регистрации сигнала рассеяния. В этом варианте высокое пространственное разрешение восстановления оптических характеристик среды достигается обработкой данных для пар наложенных участков, отличающихся по длине на заданный шаг дискретизации и нарастающих по длине.
Для оценки возможностей предлагаемой системы организации измерений, моделирование сигнала рассеяния проводилось суммированием дискретных отсчетов, полученных в реальных измерениях лидарной системой со следующими характеристиками:
-
1) Излучающая система:
-
• энергия излучения Е = 0,01 Дж,
-
• длительность импульса излучения То = 15 нc,
-
• частота следования импульсов f — 50 Гц
-
2) Приемная система:
-
• диаметр приемного зеркала D с м,
-
• режим работы фотоэлектронного умножителя (ФЭУ) — счет фотонов, квантовая эффективность ФЭУ п — 0,1
-
3) Регистрирующая аппаратура:
• Длительность регистрации одного отсчета сигнала tc— 0,4 мкс,
• число циклов накопления сигнала m - 3000,
• полное время измерений t — 60 с.
4. Результаты
Условия измерений соответствовали регистрации Пуассоновского потока фотоотсчетов сигнала. Число циклов накопления обеспечивало погрешность измерений не хуже 50%.
В дальнейшем будем называть эту лидарную систему базовой системой I , а систему с нарастающими интервалами регистрации — системой II .
Системы сравнивались по мощностям излучения ОКГ, необходимым для получения заданного отношения сигнал/фон при различной замутненности атмосферы и разных дальностях зондирования. Трасса зондирования полагалась горизонтальной. Замутненность атмосферы соответствует средним коэффициентам ослабления, лежащим в диапазоне а — 10-2,..., 1 км-1.
Длина трассы выбрана исходя из условия т — 2aL — 10. Это позволяет с погрешностью не выше 0,05% считать сигнал рассеяния, приходящий с расстояний, больших выбранного, пренебрежимо малым. Расчеты проведены в допущении однократного рассеяния, когда за условие однократности рассеяния принято ограничение т — 2aL < 3. При т > 3 полученные данные служат только иллюстрацией обнаруженных тенденций.
Все оценки проведены в допущении однородной атмосферы на основе выражений, полученных из лидарного уравнения, соответственно для систем I и II [1,2]:
n i = AW 1 (e-2σli (1 - e-2σlc))/L2 (1)
L1,2/lc ni1,i2= AW2 Σ (e-2σli (1 - e-2σlc))/(li + lc/2)2, (2)
i = lT/lc где ni, ni1,i2 - полученные дискретные значения сигнала рассеяния (число фотоотсчетов), А - коэффициент, в котором объединены вспомогательные аппаратурные характеристики, W12 - мощности излучения ОКГ, L - расстояние до центра участка трассы, с которого регистрируется сигнал, li - расстояние от лидара до этого участка, lc - длина участка, 1T - длина теневой зоны лидара, сигнал из которой не регистрируется (600 м).
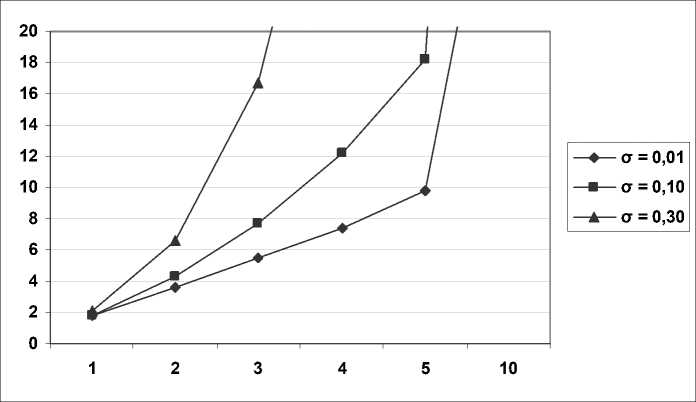
Рис. 1. Отношение мощностей излучения ( N ) двух анализируемых систем, предлагаемой ( II ) и стандартной ( I), в зависимости от длины трассы зондирования ( L ), при разных коэффициентах ослабления среды ( а ) и уровне засветок облачного дня.
При расчетах соблюдена следующая последовательность действий:
-
1) Задается отношение сигнал/фон ( к = 10).
-
2) На основе данных о фоновых засветках, выбирается уровень фона пф в числе фотоотсчетов.
-
3) В выражения (1, 2) вместо n i и ni1 , i2 подставляются
соответственно kn и кпфх , где х = 1, 2, пфх = В х пф, Вх = (L x -УД
-
4) находится отношение требуемых мощностей ОКГ :
N=W 1 /W 2 для определенных значений длины трассы ( L ) и коэффициента ослабления ( а )
-
5) Результаты таких сравнительных оценок приведены на рис. 1. Преимущества системы II очевидны, отношение требуемых мощностей (N) по вертикали графика, по горизонтали длина трассы ( L ), при коэффициенте ослабления а = 0.01, 0.1, 0.3 км - ).
Дополнительно проведена оценка относительных погрешностей измерений сигнала системами I и II ( 5 i , S ix ) соответственно из выражений :
8 i = < в ((П 1 -П ф )1/2)/П 1 , (3)
S ix = 1 в ((П 1х -2В х П ф )1/2)/ n ix , (4)
где t e — коэффициент, характеризующий вероятность соответствия расчетной погрешности ее действительному значению (при t e = 2 эта вероятность равна 0,95).
Необходимость этой оценки для системы II связана с появлением зависимости 5^(1) при неизменности заданного отношения сигнал/шум. Это обусловлено последовательным нарастанием (с шагом дискретизации t c ) интервалов измерений сигнала рассеяния и соответственно уровня фоновой засветки, что учтено в выражении (4) введением коэффициента Вх =f(t). Для больших интервалов t c погрешности измерения уровня фоновых засветок и дискретных значений сигнала становятся соизмеримыми, и существенно превосходят уровень внутренних шумов приемной системы (в рассматриваемом случае n вн . ш ~0,1 при t c =0,4мкс). Причем суммируемое значение сигнала растет до определенного момента времени, достигая уровня максимально накопленного сигнала [3,4], а уровень фоновых засветок растет линейно со временем.
Отношение мощностей ОКГ, требуемых для обеспечения точности измерений, достигаемой системой I для больших значений L , существенно выше ранее полученных значений и преимущество системы II проявляется более явно. В качестве примера в таблице 1 приведены данные расчета погрешности измерений ( S ix ) в зависимости от расстояния ( L ) при постоянном отношении сигнал/фон = 10, коэффициенте ослабления а =0,1км-1
Таблица 1
|
L (км) |
1 |
2 |
3 |
4 |
5 |
10 |
|
S ix (%) |
3,7 |
1,7 |
1,3 |
1,2 |
1,1 |
0,8 |
В расчетах использованы результаты реальных измерений системой I (n i , П ф , а), по которым оценивался коэффициент А в выражении (1), использованный в последующих расчетах для системы II (2).
Оказалось, что для системы II энергии используемого ОКГ (0,01 Дж) достаточно для проведения измерений с высокой точностью в более широком диапазоне атмосферных условий, чем в случае системы I . Это свидетельствует о возможности проведения измерений при дневных фоновых засветках.
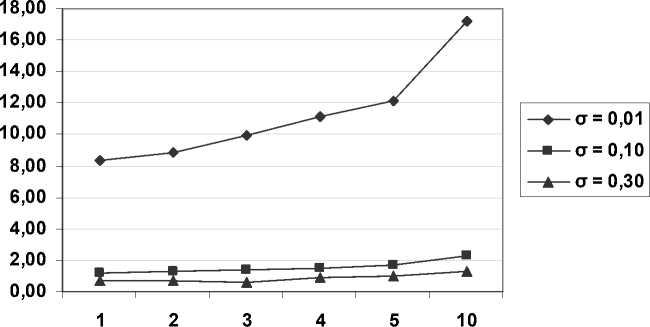
Рис. 2 Результаты расчета погрешностей сигнала ( S ix ) в зависимости от длины трассы зондирования ( L ), при разных коэффициентах ослабления среды ( а ) и уровне засветок облачного дня.
В этом случае динамический диапазон сигнала ( бмакс/бмин ) не превосходит 102. и меньше, чем для системы I , на два - четыре порядка, в зависимости от среднего коэффициента ослабления ( а ). Это позволяет обеспечить линейный режим регистрации для ФЭУ, без дополнительных мер по сжатию динамического диапазона, и связывать изменения сигнала с оптическими неоднородностями трассы зондирования с большей достоверностью.
Для полной оценки возможностей системы II проведен расчет допустимого пространственного разрешения по трассе. Подбор величины AL =L2 - L1 обеспечивает превышение приращения сигнала рассеяния над накапливаемым фоном (Апх > Апф). При этом допустимые приращения интервалов дискретизации сигнала не превосходят сотен наносекунд и дают лучшее пространственное разрешение по сравнению с системой I для широкого диапазона условий.
Проведенные оценки [1] показали, что в случае использования системы II возникает возможность измерений с точностью ~ 1 ... 10% в зоне однократного рассеяния сигналами при широком диапазоне атмосферных условий ( σ = 10~2 ....1,0 км-1) и безопасной мощности излучения источника, не превосходящей 10-20 Вт. Причем исключаются трудности обеспечения линейного режима работы приемного ФЭУ в дневных условиях.
Дополнительная сравнительная оценка проводилась в предположении использования непрерывного источника излучения мощностью W ~ 1 Вт и частотой прерывания, обеспечивающей накопление сигнала в условиях однократного рассеяния (оптическая толщина равна 3) и длительности прерывания То = 15 нc. Максимальная частота импульсов прерывания была ограничена условием нахождения одного такого импульса на соответствующей трассе зондирования (средний коэффицент ослабления среды σ = 0,1 км-1 ). Использование импульсов сформированных прерыванием из непрерывного излучения, соизмеримых по длительности с длиной трассы зондирования, позволяет обеспечить высокую частоту следования импульсов в десятки КГц, при том же полном времени измерений ( t = 60 с). В этом случае число отсчетов как фона (внешней засветки), так и рабочего сигнала повышается на несколько порядков и дает существенное увеличение точности измерений, по крайне мере на порядок (для канала регистрации, tc = 0,4 мкc), без учета внутренних шумов. Это открывает возможности использования маломощных источников излучения, типа светодиодов с формированием “импульса неизлучения” обычными оптическими затворами, с временем прерывания порядка длительности импульса обычной лидарной системы.
6. Заключение
В результате проведенных оценок можно сказать, что предлагаемый комплексный подход позволяет по крайне мере сохранить точность дистанционных измерений среды при использовании маломощных источников излучения даже в условиях значительных фоновых засветок (например днем), при высоком пространственном разрешении, если регистрация сигнала идет в режиме счета фотонов с накоплением. Такой подход может найти применение не только в лидарных системах, но и при решении 110
широкого круга задач в дистанционном исследовании различных сред активными и пассивными методами.
