Математическое моделирование развертывания солнечной батареи с использованием уравнений движения в гамильтоновых переменных

Автор: Иванов В.Н.
Журнал: Вестник Пермского университета. Математика. Механика. Информатика @vestnik-psu-mmi
Рубрика: Механика. Математическое моделирование
Статья в выпуске: 3 (42), 2018 года.
Бесплатный доступ
Рассматривается задача математического моделирования процесса раскрытия солнечной батареи космического аппарата. В качестве расчетной схемы выбрана система связанных абсолютно твердых тел с замкнутыми кинематическими цепями. Представлена новая форма уравнений движения, в которой в качестве переменных, однозначно определяющих положение и распределение скоростей тел системы в пространстве, используются гамильтоновы переменные: обобщенные координаты и обобщенные импульсы. Цель настоящего исследования: на примере одной из конструкций солнечной батареи описать все этапы применения этих уравнений в процессе компьютерного моделирования динамики механических систем с замкнутыми кинетическими цепями.
Система абсолютно твердых тел, уравнения движения, динамика, математическое моделирование, солнечная батарея, кинематические связи, kinematic сonstraints
Короткий адрес: https://sciup.org/147245393
IDR: 147245393 | УДК: 531.01+004.94 | DOI: 10.17072/1993-0550-2018-3-31-38
Modeling the deployment of a solar battery using the equations of motion in Hamiltonian variables
The problem of mathematical modeling of the process of deployment of a solar battery of a spacecraft is considered. As a design scheme, a multibody system, in the structure of which there are closed kinematic cycles, was chosen. A new form of the equations of motion is presented, in which the Hamiltonian variables are used as variables that uniquely determine the position and velocity distribution of the bodies in space: generalized coordinates and generalized impulses. The purpose of this study is to illustrate, by the example of a solar battery, all the stages of applying these equations in the process of computer simulation of the dynamics of mechanical systems with closed kinematic cycles.
Текст научной статьи Математическое моделирование развертывания солнечной батареи с использованием уравнений движения в гамильтоновых переменных
Рассматривается задача математического моделирования процесса раскрытия солнечной батареи (СБ) космического аппарата (КА). Очевидно, что без успешного завершения операции по раскрытию СБ в реальных условиях космического полета невозможно дальнейшее функционирование КА. Поэтому всесторонняя проработка всех этапов этого процесса и определение параметров конструкции, позволяющих успешно выполнить операцию развертывания СБ в различных штатных и нештатных ситуациях космического полета, является важной частью опытно-конструкторских работ при проектировании СБ.
Физическая стендовая имитация процесса раскрытия СБ в заводских условиях требует привлечения сложного и дорогостоящего экспериментального оборудования и создания полноразмерных опытных образцов СБ. Компьютерное моделирование на всех стадиях
разработки позволяет существенно снизить объем экспериментальных работ и, соответственно, уменьшить затраты на их организацию и проведение.
Различным подходам к решению поставленной задачи посвящено большое количество работ, некоторые из которых приведены в списке литературы [1–6].
В настоящей работе в качестве расчетной схемы математической модели выбрана система связанных абсолютно твердых тел (СТТ) с замкнутыми кинематическими цепями. Представлена новая форма уравнений движения СТТ, в которой в качестве переменных, однозначно определяющих положение и распределение скоростей тел системы в пространстве, используются гамильтоновы переменные: обобщенные координаты и обобщенные импульсы (импульсы Пуассона). Цель настоящего исследования: на примере одной из конструкций СБ описать все этапы применения этих уравнений в процессе компьютерного моделирования динамики механических систем с замкнутыми кинетическими цепями.
1. Описание механической системы
Для начала рассмотрим систему связанных абсолютно твердых тел со структурой дерева. Будем предполагать, что кинематические связи, реализуемые в шарнирах, голо-номны и идеальны.
Пусть N – число тел и шарниров в системе (не считая тела «0», движение которого во времени относительно инерциальной системы координат (СК) задано).
Пронумеруем тела и шарниры таким образом, чтобы для любого тела или шарнира в графе системы номер предшествующего ему тела или шарнира был меньше. В этом случае для полного описания структуры взаимосвязей в такой системе достаточно одного цело-
за переносное, в соответствии с правилом сложения скоростей можно записать рекуррентные формулы для вычисления проекций
линейной υi и угловой ω i скоростей тел ме-
ханической системы на оси i -й СК [7]:
v = Cv + Aq + v * (l)
i ik ii i
численного массива k = { k^ ,
...,
kN } , на i -м
месте которого расположен индекс тела или шарнира, предшествующего i -му. C каждым телом системы свяжем следующие множества: P i – упорядоченное множество индексов шарниров, составляющих путь между нулевым и i -м телами; U i – множество индексов шарниров, для которых i -е тело является предшествующим.
Введем следующие обозначения: ρ – матрица-столбец координат точки O i начала СК, связанной с i -м телом, в k -й СК; r – матрица-столбец координат точки O i в инерциальной СК; G i j – матрица направляющих косинусов между базисными векторами j -й и i -й систем координат (матрица преобразования координат из j -й СК в i -ю).
Введем матрицы-столбцы обобщенных
координат q i = ( q l ,
...,
nT q11) , параметризую-
щих уравнения связей каждого i-го шарнира, n – число обобщенных координат. Матрицы p и G = G1 являются функциями обобщен- i ik i ных координат:
P i = P i ( q i , t ) , G i = G i ( qi, t ) .
Введенные матрицы связаны между собой рекуррентными формулами:
r = r^ + G 00 P i , G 0 = G 1 G 0
.
Принимая движение i -го тела за относительное, а предшествующего ему k i -го тела
I U где v = 1
1 k 0
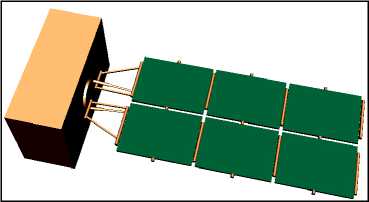
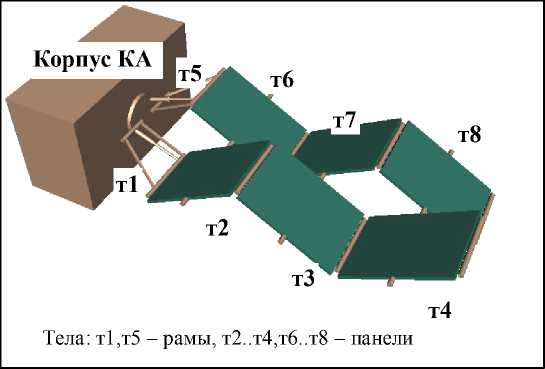
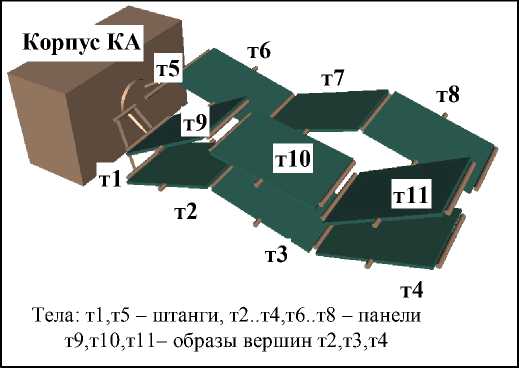
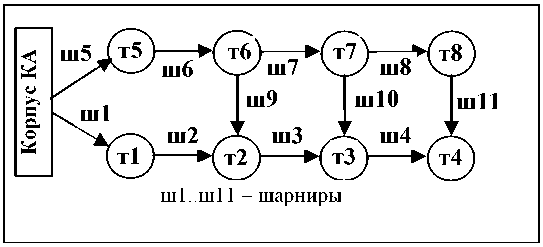
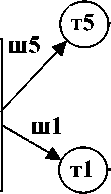
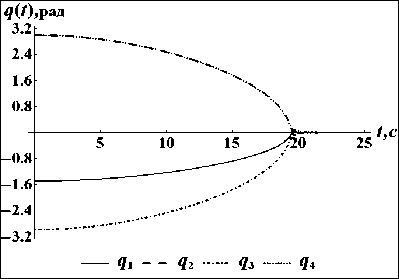
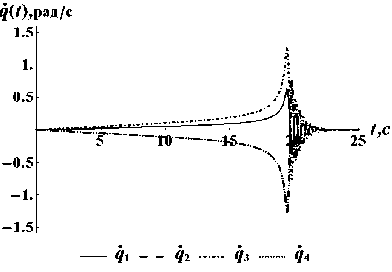
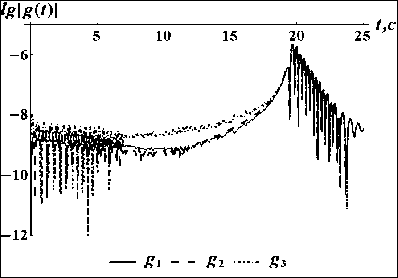
U d aij = Gi , 1j 1d q{ - r d GT 0 = G J, 1 1dt , * vi υi* * U1. k 01 ) , Ai = =G1%, dt J = l, n, C1 =( G1 k aυi1 aiω1 . . . ... a 0=G1 —G1P1 Gi υ an a0 ) d GT , dql , Здесь и далее символ «~» используется для обозначения кососимметричной матрицы (это соответствует матричной записи векторного произведения [7]). Введем блочную 6N×6N-матрицу S с квадратными подматрицами порядка 6 по следующей формуле: S ■ = 1j E6, - C1, 06x6, J =1, ____ J = k1, 1, J = l, N. (2) j *1 v k1, Заметим, что для любой кинематической структуры эта матрица содержит в каждой строке только два ненулевых блока E6и - C1. Поскольку матрица S содержит информацию как о топологической структуре системы, так и об относительном положении тел в системе, ее называют матрицей кинематической структуры. С использованием матрицы S уравнения кинематики системы тел (1) можно записать следующим образом: STv = Aq + v *, (3) где A = d1ag(Ai,...,An), q=(qi,...,qN) , v = (vi,...,vn)T. Рекуррентные формулы (3) можно записать в виде явных выражений v = T (Aci + v *), (4) где обратная к S матрица T = S 1является блочной 6N×6N-матрицей, подматрицы которой могут быть вычислены по рекуррентным формулам: E6, T = < С Т, ■ / 1"l J J, I 06x6, J =1, ____ J e P1, 1, J = l, N. J £ P1, 2. Уравнения движения СТТ со структурой дерева в гамильтоновых переменных Пусть mi – масса i-го тела; Ji – тензор инерции i-го тела; ric – матрица-столбец проекций радиуса-вектора центра масс i-го тела на оси связанной с ним СК; fio , mio – проек- ции главного вектора и главного момента активных сил, действующих на i-е тело в i-й СК; Q – матрица-столбец обобщенных сил. Для математического моделирования раскрытия СБ используем расширенную форму уравнения движения СТТ со структурой дерева в гамильтоновых переменных [8]: Mv - ST ц = 0, -- STv + Aq = - v *, (6) AT Ц = P, p = ( AT - ATо) ц + Q. (7) Здесь введены следующие обозначения: M = diag (M i,..., Mn ), О = diag (Oi,..., О n ), Q = ATTTF, F = (Fi,...,Fn)T, Fi=(f0,mO)T, Mi = f mtE c < mi Г -miri Ji J О i = ωi ~ υi 0 ωi Особенность уравнений (6), (7) состоит в том, что они разрешены относительно производных обобщенных импульсов p (импульсов Пуассона). Первые три уравнения (6) образуют линейную систему с симметричной, блочной трехдиагональной разреженной матрицей коэффициентов относительно скоростей v, q и переменных ц, которые являются множителями Лагранжа. Полный вывод уравнений движения в форме (6), (7) можно найти в работе [8]. 3. Уравнения движения СТТ с замкнутыми цепями в гамильтоновых переменных Структуру механической системы можно представить в виде графа, вершины которого есть тела системы, а ребра – шарниры. Этот граф назовем первичным графом. Первичный граф всегда можно превратить в граф со структурой дерева (вторичный граф) путем размыкания замкнутых контуров. Размыкание проведем с помощью раздвоения в каждом замкнутом контуре одной из вершин первич- ного графа. При этом одну и ту же вершину можно раздваивать произвольное число раз. При раздвоении все образы одной вершины остаются не связанными непосредственно между собой и принадлежат к различным ветвям приведенной системы (вторичного графа). В приведенной системе существует соответствие между образом и прообразом раздвоенной вершины. Соединим пунктирными ребрами все такие пары вершин вторичного графа. Массово-инерционные характеристики раздвоенных вершин первичного графа и действующие на них внешние силы необходимо произвольным образом распределить между дополнительными вершинами вторичного графа. Пронумеруем тела и шарниры вторичного графа в соответствии с введенной выше правильной нумерацией вершин СТТ со структурой дерева. Пусть теперь N – число вершин вторичного графа и массивы k , P , U характеризуют структуру вторичного графа. Ведем матрицу s = (sj.), число строк которой соответствует числу дополнительных замкнутых циклов, а число столбцов совпадает с числом вершин (тел) во вторичном графе системы. Пусть s. = 1, если j — номер вершины в первичном графе системы, принадлежащей i-му замкнутому циклу, s = -1, если j - номер ij вершины во вторичном графе системы, являющейся образом соответствующей вершины первичного графа и принадлежащей i-му замкнутому циклу, s = 0 во всех других случаях. ij Будем считать, что СК, связанные с образами и прообразами раздвоенных вершин, расположены в телах одинаково. Тогда абсолютные координаты и скорости всех точек прообразов и образов раздвоенных вершин, спроектированные на связанные СК, должны совпадать. Это означает, что условия замкнутости кинематических цепей накладывают на движения вершин вторичного графа следующие кинематические и геометрические связи (ограничения): sv = sT (Aq + v * ) = 0, sn = s [ vdT = 0, 0 где n = j vdr - квазикоординаты. Ограничения (8), (9) очевидно являются зависимыми, поэтому при выводе уравнений движения будем учитывать только связи (9) на квазикоординаты. Модификацию уравнений движения (6), (7) можно выполнить, используя принцип Гамильтона–Остроградского [7]. При этом геометрические связи (9) учтем с помощью множителей Лагранжа η. Опуская выкладки, выпишем систему дифференциально-алгебраических уравнений в гамильтоновых переменных, которые вместе с уравнениями связей (8), описывают динамику СТТ с замкнутыми кинематическими цепями: Mv - ST ц = 0, <- STv + Aq = - v *, (10) AT Ц = P, p = ( AT - AT о) ц + AtTt (F + sTn). (11) Для определения множителей η будем использовать метод модифицированных функций Лагранжа [9, 10]. В этом случае уравнение (11) преобразуется к виду: p = ( AT - AT О) ц + ATTTF --ATTTsT (C (sn + u) + Dsv), где C, D – положительные диагональные матрицы коэффициентов жесткости и демпфирования колебаний невязок связей επ вокруг тривиального решения, u – вектор модифицированных множителей Лагранжа, компоненты которого можно рассматривать как управляющие параметры ПИД-регулятора. При этом множители η и u связаны соотношением n = -Cu. Тогда вместо второго из уравнений (11) для замыкания уравнения (12) можно использовать линейные дифференциальные формулы для пересчета управлений u ПИД-регулятора: u = k sn + k sv, (13) πv где k , k – коэффициенты усиления обрат-πv ной связи по нарушению ограничений (8) и (9). Уравнения (10), (12) и (13) образуют замкнутую систему дифференциальноалгебраических уравнений динамики СТТ с замкнутыми цепями в гамильтоновых переменных. Выбор параметров ПИД-регулятора. Настройка управляющих слагаемых в уравнениях (12), (13) заключается в подборе четырех векторных параметров k , k , С и D. Приме-πv ним следующий подход. Пусть на механическую систему накладывается только одна дополнительная связь (9). Если из системы уравнений (12), (13) исключить компоненты вектора состояний механической системы, удалить внешнее силовое воздействие, а затем линеаризовать эту систему и продифференцировать, то получим линейное однородное ДУ, описывающее собственные колебания модифицированного множителя Лагранжа u : u + sTAM “1 ATTTsT (Du + ( (14) +C (1 + kv) u + Cknu = 0, где M = ATTTMTA . Потребуем, чтобы характеристическое уравнение для ДУ (14) имело вид: (k + во)[ k + (в1 + iv)][ k + (в1 - iv)] = 0, (15) где β0, β1– коэффициенты демпфирования, ν – круговая частота регулятора. Предположим, что v2> v]2iax- в\ , в0 = p0vmax , в1 = pvmax , p0,1 = O(1), т. е. время переходного процесса в системе управления должно быть меньше, чем период наивысшей частоты колебаний механической системы. Сопоставляя характеристическое уравнение для ДУ (14) и уравнение (15), получаем следующие параметры ПИД-регулятора: ( sTAM-1( sTA )T D = ( P0 + 2P1) vmax, (sTAM!-1(sTA) T )c = vmax, (16) kn = P 0v max, kv = 2P 0 P1. Равенства (16) задают коэффициенты усиления обратной связи, демпфирующие и упругие параметры ПИД-регулятора (13). С практической точки зрения преимущество системы уравнений (10), (12), (13) заключается в том, что она имеет ту же структуру, что и исходная система (6), (7) без дополнительных связей. Это означает, что для ее разрешения относительно ускорений можно использовать те же методы, что и для исходной системы уравнений (6), (7). В работах [11, 12] получены алгоритмы метода прогонки и Холецкого разрешения системы уравнений (6), (7) относительно старших производных. В настоящей статье для разрешения системы уравнений (10), (12), (13) используется метод прогонки. Уравнения построены таким образом, что при возникновении отклонений επ изменяется в первую очередь ненапряженная длина дополнительного упруго-демпфирующего элемента C (sn + u) + Dsv так, чтобы создаваемая этим элементом дополнительная сила обеспечивала скольжение механической системы по дополнительной связи επ . 4. Решение уравнений движения СТТ методом прогонки Метод прогонки по существу является модификацией метода Гаусса решения систем линейных алгебраических уравнений с ленточной структурой. В данном методе при прямом ходе, который выполняется начиная с последнего тела системы, из группы уравнений (6) исключаются множители Лагранжа µ. При обратном ходе по явным формулам вычисляются последовательно для каждого тела системы обобщенные скорости с/, декар-товые скорости v и множители Лагранжа µ. Вывод рекуррентных формул метода прогонки подробно изложен в статьях [11, 12]. Здесь же приведем только результирующий алгоритм метода. Алгоритм метода прогонки for i = N :1 M * = M +y C^HM * C jeU j j j j D = AtM * A for i = 1: N q = D p - AT i i cp + m i i n = v i i v = Cv + Ac/ + v * i ik ii i и = M v + m i i i i end ll = k sn + k sv πv for i = N :1 F* = F + У s |C (Ул Л + u 1 + i i j ji j k jk k j D У S ,v,\ + Y . CTF* j^k jk k) j-UeUi j j p =(AT - ATq)и + ATF* i \ i i i / i i i end Трудоемкость решения с помощью данного алгоритма растет по линейному закону в зависимости от числа тел в механической систем. При реализации этого алгоритма требуется обращение только симметричных положительно определенных матриц ATM*A , порядок которых равен числу степеней свободы в i-м шарнире, причем эти матрицы симметричны и положительно определены, а их порядок всегда мал (не превышает шести). Именно этим и обусловлена эффективность этого метода. 5. Моделирование раскрытия СБ Описанную выше методику применим для математического моделирования процесса раскрытия одной из конструкций солнечной батареи (СБ), в конфигурации которой есть замкнутые цепи. Пусть СБ состоит из двух подобных цепочек солнечных панелей, соединенных в виде параллелограммного механизма (пантографа). Каждая цепочка есть многозвенный физический маятник, звенья которого соединены одностепенными вращательными шарнирами. На рис. 1 показаны фазы во времени раскрытия СБ. Расчетная схема СБ с тремя замкнутыми контурами, размещенная на КА, представлена на рис. 2. СБ содержит шесть однотипных солнечных панелей, соединенных с КА двумя рамами. В соответствии с методикой, проведем размыкание замкнутых контуров раздвоением подходящих вершин первичного графа. На рис. 3 представлена схема СБ со структурой дерева, полученная после раздвоения трех панелей первой цепочки СБ. Соответствующие расчетным схемам первичный и вторичный графы с замкнутыми цепями и со структурой дерева представлены на рис. 4 и 5. 0 c 8 c 24 c 16 c Рис. 1. Фазы во времени раскрытия СБ с конфигурацией в виде пантографа Рис. 2. Схема СБ с конфигурацией пантографа Рис. 3. Схема модели СБ с раздвоением вершин Рис. 4. Первичный граф СБ с замкнутыми цепями т9 т10 ш2 ш3 т2 т3 т6 ш6 ш7 ш9 ш11 ш4 т4 ш1..ш11 – шарниры Рис. 5. Вторичный граф СБ со структурой дерева Масс-инерционные характеристики вершин первичного графа разделим поровну между образами и прообразами раздвоенных вершин вторичного графа. Исходная механическая система имеет одну степень свободы. После размыкания замкнутых контуров система уже имеет 11 степеней свободы. В качестве обобщенных координат выберем относительные углы между последовательными звеньями СБ. Подготовим элементы уравнений движения. Структура вторичного графа системы задается вектором k = ( 0,1,2,3,0,5,6,7,6,7,8). Системы координат (СК), связанные с панелями, выберем в их центрах симметрии. В каждой СК ось Oz направлена перпендику- лярно плоскости соответствующей панели, а ось Ox параллельна оси вращения в шарнирном соединении. ki Пусть r i , r – радиус-векторы i-го шарнира в ki-й и i-й СК соответственно, q – относительные углы развертывания тел СБ (обобщенные координаты). Тогда матрицы направляющих косинусов между базисными векторами СК и радиус-векторы центров СК в предыдущих СК имеют вид (i = 1,...,11) : G = 0 i cosq .0 sin qi kTi р = ri - G r . i i i i 0 - sin q cos q < ^i J Элементы матриц A и С вычисляются по формулам (1). Матрица структуры дополнительных связей тел вторичного графа системы, вызванных замкнутыми циклами, имеет вид: (0 1 0 0 0 0 0 0 -1 г= 00100000 0 ^0 0010000 0 0 0 л -1 0 0 -1J В исходном положении панели СБ компактно сложены и зафиксированы на корпусе КА (рис.1). Начальные условия на обобщенные координаты в начальный момент интегрирования задаются вектором q(0) = (-pп, —П,n,p-п,п,-п,п,-п,пл. При раскрытии батареи происходит перевод батареи в конечное (раскрытое) рабочее положение q (t) = 0 и фиксация батареи в нем. Пружины кручения, расположенные в шарнирах и отвечающие за распахивание звеньев СБ, моделируются линейными упру-го-демпфирующими элементами. В силовой характеристике каждого упругого элемента учитывается предварительный угол закрутки пружины кручения. Когда угол раскрытия смежных звеньев в i-м шарнире достигает конечного значения q (t) = 0, происходит фиксация соответст- вующего звена на упоры. Фиксация звеньев также моделируется упруго-диссипативными моментными силовыми элементами с большими значениями коэффициентов жесткости и демпфирования, чем в рабочих пружинах кручения шарниров. В результате численных расчетов в среде САВ Mathematica были получены графики изменения во времени обобщенных координат, скоростей всех звеньев СБ и невязок в дополнительных связях. На рис. 6, 7 приведены графики обобщенных координат и скоростей первых четырех звеньев СБ, входящих в первую цепочку. Результаты для второй цепочки панелей СБ идентичны. На рис. 8 в логарифмическом масштабе представлены зависимости длин невязок дополнительных связей |g (t )| = |гп( t )|, обеспечивающих замыкание параллелограмм-ного механизма СБ и вызванных действием управляющих воздействий ПИД-регуляторов. Графики на рис. 8 характеризуют достигнутую точность численного моделирования. Отметим, что на всех рисунках можно выделить характерные области. Например, участок постепенного изменения координат и скоростей вследствие работы пружин кручения и участок ударного срабатывания механизмов фиксации панелей и последующих затухающих колебаний элементов конструкции СБ. Рис. 6. Угловые координаты в шарнирах Рис. 7. Угловые скорости в шарнирах Рис. 8. Порядки невязок связей Заключение В статье описаны методы формирования математических моделей систем твердых тел с замкнутыми кинематическими цепями с использованием уравнений движения в гамильтоновых переменных. Представлены алгоритмы численного моделирования подобных механических систем. Приведены все этапы компьютерного моделирования процесса раскрытия солнечной батареи, в конфигурации которой содержатся замкнутые цепи с использованием описанной методики.



Список литературы Математическое моделирование развертывания солнечной батареи с использованием уравнений движения в гамильтоновых переменных
- Бушуев А.Ю., Фарафонов Б.А. Математическое моделирование процесса раскрытия солнечной батареи большой площади // Математическое моделирование и численные методы. 2014. № 2 (2). С. 101-114.
- Борзых С.В., Ильясова И.Р., Щиблев Ю.Н. Динамика раскрытия крупногабаритных солнечных батарей // Космонавтика и ракетостроение. 2012. № 4 (69). С. 89-99.
- Еремин Л.И., Пугач И.Ю., Минчакова Е.П. Уточнение математической модели процесса раскрытия батареи фотоэлектрической с учетом влияния податливости шарнирного узла и нелинейности его жесткостных характеристик // Вопросы электромеханики. Труды ВНИИЭМ. 2017. Т. 158, № 3. С. 3-6.
- Крылов А.В., Чурилин С.А. Моделирование раскрытия солнечных батарей различных конфигураций // Вестник Московского государственного технического университета им. Н.Э. Баумана. Серия: Машиностроение. 2011. № 1. С. 106-112.
- Зимин В.Н., Крылов А.В., Мешковский В.Е., Сдобников А.Н., Файзуллин Ф.Р., Чурилин С.А. Особенности расчета раскрытия крупногабаритных трансформируемых конструкций различных конфигураций // Наука и образование: научное издание МГТУ им. Н.Э. Баумана. 2014. № 10. С. 179-191.
- Ручкин Л.В., Ручкина Н.Л. Моделирование трансформируемых механических систем // Сибирский журнал науки и технологий. 2017. Т. 18, № 4. С. 820-824.
- Лурье А.И. Аналитическая механика. М.: Гос. изд-во физ-мат. лит., 1961. 824 с.
- Иванов В.Н., Полосков И.Е., Шимановский B. А. Математические модели систем связанных твердых тел в импульсах Пуассона // Фундаментальные исследования. 2016. № 10-3. С.493-499.
- Иванов В.Н. Применение метода модифицированных функций Лагранжа для учета дополнительных связей в механических системах // Вестник Пермского университета. Математика. Механика. Информатика. 2013. Вып. 4 (23). С. 19-28.
- Иванов В.Н., Полосков И.Е. Метод модифицированных функций Лагранжа в задаче моделирования механических систем с дополнительными связями // Современные наукоемкие технологии. 2016. № 10-1. С. 67-73.
- Иванов В.Н., Шимановский В.А. Численные методы формирования и решения уравнений движения в импульсах Пуассона систем твердых тел со структурой дерева // Современные наукоемкие технологии. 2017. № 10. С. 13-18.
- Иванов В.Н. Алгоритмы решения уравнений движения в импульсах Пуассона систем твердых тел со структурой дерева // Вестник Пермского университета. Математика. Механика. Информатика. 2017. Вып.4(39). C. 25-31.
