Оптимальное по быстродействию кинематическое управление стыковкой твердых тел во вращающейся системе координат

Автор: Стрелкова Н.А.
Журнал: Вестник Пермского университета. Математика. Механика. Информатика @vestnik-psu-mmi
Рубрика: Механика. Математическое моделирование
Статья в выпуске: 1 (24), 2014 года.
Бесплатный доступ
Решена задача оптимального по быстродействию кинематического управления стыковкой двух твердых тел во вращающейся системе координат. В аналитическом виде найдены время быстродействия, оптимальные траектории и управления. Приведены числовые примеры, иллюстрирующие разработанную теорию.
Кватернионы, бикватернионы, стыковка, оптимальное управление, принцип максимума понтрягина
Короткий адрес: https://sciup.org/14729902
IDR: 14729902 | УДК: 62-50
Time-optimal kinematic control of solid bodies docking in a rotating coordinate system
The problem of the two solid bodies docking time-optimal kinematic control in a rotating coordinate system is solved. The time optimal, controls and optimal movement path are found in the analytic form. The numeric examples illustrating the developed theory are given.
Текст научной статьи Оптимальное по быстродействию кинематическое управление стыковкой твердых тел во вращающейся системе координат
Проводится обобщение задачи оптимального по быстродействию кинематического управления стыковкой двух твердых тел, рассмотренной в работе [1], на случай движения твердых тел во вращающейся системе координат, что представляет интерес при исследовании оптимальных движений пространственных механизмов, оптимальных условий стыковки космических аппаратов, при управлении манипуляционными роботами и т.д. Для определения времени быстродействия, траекторий оптимального движения и управляющих функций применяются аппарат кватернионов и бикватернионов, методы винтового исчисления и принцип максимума Л.С. Понтрягина.
1. Постановка задачи оптимального управления
Рассматривается задача оптимального по быстродействию управления стыковкой двух твердых тел во вращающейся системе координат, когда в конечный момент времени
происходит совпадение систем координат, неизменно связанных с телами. Пусть опорная система координат I совершает вращение с угловой скоростью го * = го * ( t ) относительно инерциального пространства. Тогда кинематические уравнения, описывающие перемещения твердых тел 1 и 2, имеют вид
2 X k = X к ° го к - го * ° х к , (1)
2 X 0 = Xk ° ик + X 0 ° гок - го * °Х 0 , к = 1,2.
Здесь Xk + s Xk - бикватернионы, опре- деляющие положение связанных с телами систем координат E и E относительно опорного базиса I, s – символ Клиффорда, (s2 = о). Кватернионы Хк характеризуют ориентацию твердых тел в опорной системе координат; Xок =1 rk ° Xк =1 rk ° Xк , где rk, r'k - гиперкомплексные отображения радиус-векторов, соединяющих начала опорной и связанных систем координат, на опорный и связанный базисы соответственно. ω , υ – гиперкомплексные отображения векторов угловой и поступательной скоростей на связанные с твердыми телами базисы E и E .
Начальные положения твердых тел задаются равенствами
X k ( 0 ) = I k 0 , I k ( 0 ) = I k 0 , k = 1,2, (2)
а конечное положение (совпадение систем координат E и E ) определяется условиями
X , ( T ) = ± X 2 ( T ) , l 0 ( T ) = ± X 0 ( T ) , k = 1,2. (3)
На угловые и поступательные скорости наложены ограничения
|| Ю k 11 = ® H + ^ k 2 + a k 3 - a k ,
|| U k || = Ц 2 + U k 2 + U 2 < b 2 , (4)
a k , bk = const > 0, k = 1,2.
Требуется найти управляющие функции a kj , u kj ( k = 1,2, j = 1, 2, 3 ) , удовлетворяющие кинематическим уравнениям (1), ограничениям (4) и минимизирующие время перемещения твердых тел из начального положения (2) в конечное (3).
q k = vect ( ~ k ° v k ) , k = 1,2. (8)
Используя полученные соотношения, найдем
2 q k =- w k ° ~ k ° v k + x k ° w * ° v k + + sqal ( w k ° ~ k ° v k + X k ° w * ° v k ) +
—
~
+ X
■ k ° v k ° w k
sqal ( X k ° v k
= [ ~ k ° v k
—
~
—
X k ° w
° w k
~
—
—
w k °
[ ~ k ° v k
*
° v k
X k ° w
*
sqal ( X k ° v k )]
—
—
° v k ) =
° w k
—
sqal ( X k ° v k )] =
= q k ° w k — w k ° q k , k = 1,2.
2. Построение оптимального решения
Воспользуемся принципом максимума Л.С. Понтрягина [2]. Введем в рассмотрение кватернионы ψ , ψ k 0 , соответствующие кватернионам λ , λ k 0 , и составим функцию Гамильтона – Понтрягина:
H = Z sqal ( X k ° v k + X k ° ~ k ) = k = 1
= -Z sqal ( X k ° w k ° v k - w * ° X k ° v k +
2 k = 1
+ X^ ° Uk ° v 0 + X 0 ° wt ° v 0 - w * ° X 0 ° v 0 ) .
kk k k k k k k
Следовательно, qk = qkx wk, k=1,2. (9)
Аналогичным образом получаем pk = pkx wk + qkx Uk, k=i,2- (10)
Из условия максимума функции Гамильтона – Понтрягина (6), соотношений (5)– (10) следует, что оптимальные управления wj, ut ( k = 1,2 ) выражаются теми же формулами, что и в случае неподвижной опорной системы координат [1], а именно
w 1 = a 1 Z , w 2 =- a 2 Z , (11)
U 1 = b 1 X 1 ° Z ° X 1 , u 2 =— b 2X2 ° Z ° X 2, (12)
где ζ и ξ – единичные, постоянные по направлению векторы.
Подставим выражения (11), (12) в уравнения (1) и найдем решение этой системы дифференциальных уравнений при начальных условиях (2). Получаем
Выпишем сопряженную систему дифференциальных уравнений
2 v k = v k ° w k — w * ° v k + v k ° U k , 2v k = v k ° w k - w * ° v k , k = 1,2
и преобразуем функцию H 12
H = ,Z sqal ( w k ° p k + u k ° q k -
2 k = 1 (6)
- w * ° x k ° v k - w * ° x k ° v k )•
|
X 1 = H ( t ) ° Xw ° exp f X 2 = p ( t ) ° X 20 ° exp ^- |
a i t J z 1 ’ |
|
|
a 2 1Д " T z J ’ |
(13) |
|
|
Xj1 = p ( t ) ° Vj ( t ) ° exp |
f a 1 1 й 1 z J ’ |
(14) |
|
X 0 = H ( t ) ° V 2 ( t ) ° exp f |
a 2 1 z0 - T z J ’ |
|
Здесь так же, как и в работе [1], введены обозначения pk = vect(~k ° vk + X0 ° vk), (7)
где
V 1 ( t ) = 1 b 1 J [ X ( t ‘ ) ° Z ° m ( t ‘ ) ° X 10 ] dt ‘ + X 00 ,
V 2 ( t ) = - 1 b 2 J [ X ( t ‘ ) ° Z ° m ( t ') ° X 20 ] dt ‘ + X 00 ,
г
p ( t ) - решение кватернионного уравнения
|
2р = - ст * ° р , |
|
удовлетворяющее начальному условию |
|
р ( 0 ) = 1 , в частности, если вектор ст * ( t ) име- |
|
ет постоянное направление, то |
|
( |
|
Н ( t ) = exp --[ ст * ( т ) d r . |
|
х 2 0 7 |
Используя граничные условия (3) и равенства (13), (14), найдем оптимальные по быстродействию время T взаимной переори-
exp
х
1 t
“7J ст * ( т ) d T
Т
х
1 cos
t 1
I ш * d r , 0, sm — 02
t
J ш * d r , 0 .
ентации твердых тел, время T , при котором
начала систем координат E и E совпадают,
и векторы ζ , ξ :
T = —-—arccos |sqal(~[0 ° X20)| a+a2 1 1
T2 = , , ^ 20 ° ^ 20 X 10 ° X 10
b l + b 21
^ = ± vect ( ~ 10 ° X 20 ) | vect (x w ° X 20 )|
§=
X 20 ° X 20 X 10 ° X 10
X 20 ° X 20 - X 10 ° X 10
В формуле (17) следует брать верхний знак, если sqal ( ~ 0° X20) > 0 , и нижний, если sqal ( Zj0 ° X20) < 0 .
Из полученных соотношений вытекает, что оптимальная по быстродействию стыков-
ка твердых тел осуществляется за время T = max (T, T2 ), где T и T вычисляются по формулам (15), (16). Векторы оптимальных управлений ω и иk (k = 1,2) находятся из соотношений (11), (12), (17), (18) при t e[0,T ] и t e[0, T ] соот
Оптимальное по быстродействию перемещение твердых тел из начального положения
X 10 = ( 0.001; 0.2; 0.5; 0.8426 ) ,
X 00 = ( - 0.5; - 0.1;0.041;0 ) ,
X 20 = ( 1;0;0;0 ) , X 2o = ( 0;0;0;0 )
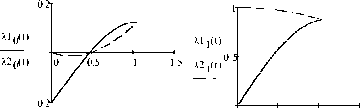
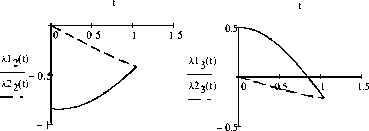
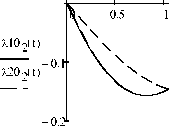
в конечное состояние (3), при ax = 2, a2 = 1, b = 0.5, b2 = 0.1, ш* = 1, осуществляется за время T = T2 = 1.7052 . Графики функций Akj(t), А0(t) (k = 1,2, j = 0,1,2,3) изображены на рис. 1–2, компоненты угловых скоростей определяются равенствами ш11 =-0.4, ш12 =-1, ш13 =-1.6852, ш21 = 0.2, ш22 = 0.5, ш23 = 0.8426, а графики изменения компонент поступательных скоростей и(t), u2J(t)(j = 1,2,3) представлены на рис. 3. В момент времени T = 1.0465 происходит совпадение ориентаций систем координат E и E относительно неподвижного базиса, в этот момент времени X1( T )= X 2 (T1 )=(0.1238;0.8751;-0.4147;-0.2164 ). При t g[T, T] осуществляются только поступательные перемещения твердых тел при неизменной ориентации, в течение этого времени Л j (t)=4 j (T1)=Л2 j (t)=4 (T) (j = 0,1,2,3),
Ш] ( t ) = 0 ( j = 1,2,3 ) . В конечный момент времени t = T происходит совпадение начал систем координат E и E , при этом
X 0 ( T ) = X 0 ( T ) = ( 0.0821; - 0.0159; - 0.0140; 0.0093 ) .
ветственно; причем ю4 = 0 на промежутке [ T , T ] , если T < T и U = 0 на промежутке [ T 2 ,T 1 ] , если T 2 < T .
0 0.5 1 1.5
Пример 1
Рассмотрим случай, когда опорная система координат I является орбитальной [3], что представляет интерес при исследовании оптимальных условий стыковки космических аппаратов. Тогда ст * ( t ) = ш * ( t ) • i2 и
t
t
Р ис. 1. Графики функций 4 ( t ) и А, ( t ) ( j' = 0,1,2,3 )
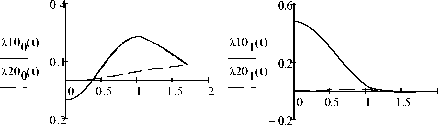
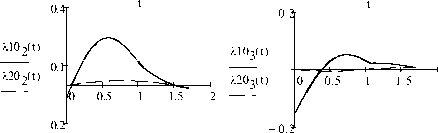
Рис. 2. Графики функций ^ ( t ) и ^ ( t ) ( j = 0,1,2,3 )
^ _ vect ( Z 10 ° Z 20 )
I vect ( ~ю ° Z 20 )| ’
ζ 0
= ± vect ( ~ 10 ° z 20 ) х | vect ( ~ 10 ° z 20 )|
Х [ sqal ( Z 10 ° Z 20 + Z 10 ° Z 20 ) sqal ( Z 10 ° Z 20 )] ± vect ( Z 10 ° Z 20 + Z 10 ° Z 20 )
I vect ( ~ 10 ° Z 20 )|
Zj = ^ ( t ) ° Zj0 ° exp
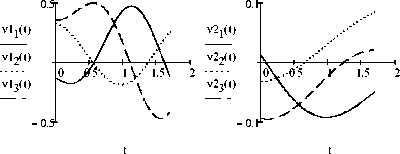
Рис. 3. Графики функций ц ( t ) и и2 ( t ) ( j = 1,2,3 )
3. Применение принципа перенесения Котельникова – Штуди
Рассмотрим задачу оптимального по быстродействию кинематического управления стыковкой твердых тел во вращающейся системе координат, для случая, когда поступательные скорости тел 1 и 2 не ограничены, а угловые скорости удовлетворяют ограничениям (4).
Применим принцип перенесения Котельникова – Штуди [4] к соотношениям (11), (13), (15), (17), определяющим оптимальную по быстродействию ориентацию твердых тел. Заменим кватернионы Z, ^, Zk о, wt ( k = 1,2 ) на соответствующие им бикватернионы Z + s Z 0, Z k + s Z k , Z k 0 + s z k 0 , © k + s и k ( k = 1,2 )
и максимальные модули угловых скоростей a k ( k — 1,2 ) на дуальные модули ak + sa 0 ( k = 1,2 ) кинематических винтов твердых тел 1 и 2. После "развертывания" полученных соотношений по правилам винтового исчисления [4], найдем искомые управляющие функции, траектории движения и время быстродействия
Z2 = g(t)° Z20 ° exp I —
z0 = Xt)° z00 ° exp [ atZ] +
\ 2
+ z 10 ° еД at Z j t ( a 0 Z + a 1Z ° ) , z 2 = H ( t ) ° z 20 ° exP ( aY Z j
-
— z 20 ° exp (— О 2 Z j t ( a 0 z + a 2 z 0 )
T = —-— arccos I sqal(~j0 ° Z20)|, ax + a2 11
0 0 _ — 2sqal ( Z 10 ° z 20 + Z 10 ° z 20 )
a + a 2 — т i------------j----------- .
T jl — sqal2 ( ~ 10 ° Z 20 )
Верхний знак в выписанных формулах соответствует sqal ( ~10 ° Z 20 ) > 0 , а нижний -sqal ( ~10 ° Z 20 ) < 0 .
Пример 2
Перемещение твердых тел из начального положения
Zo = ( 0.001; 0.2; 0.5; 0.8426 ) ,
Z 0 = ( — 0.5; — 0.1; 0.041; 0 ) ,
Z 20 = ( 1;0;0;0 ) , Z 20 = ( 0;0;0;0 )
в конечное состояние (3), при al — 2, a 2 — 1, ш * — 1 , осуществляется за время T — 1.0465 при тех же значениях угловых скоростей
® 1 J ( t ) , ^ 2 J ( t ) ( J = 1,2,3 ) , что и в примере 1 и следующих значениях компонент векторов поступательных скоростей твердых тел 1 и 2:
U = 0.1002, u 12 =- 0.3315, u 13 =- 0.4205, u 21 =- 0.009, u 22 = 0.2685, u 23 = 0.3834.
Параметры кинематических винтов соответ- ственно равны — = 0.25, — = 0.4555. Зави- a1 a2
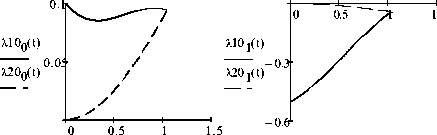
симости Akj(t), (k = 1,2, J = 0,1,2,3) те же, что и на рис. 1 примера 1, зависимости ^kj(t) (k = 1,2, J = 0,1,2,3) изображены на рис. 4. В конечный момент времени
X! ’ ( T ) = X 0 ( T ) =
= ( 0.0944; - 0.0414; - 0.1462;0.1666 ) .
t
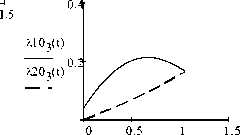
Рис. 4. Графики функций ^} ( t ) и ^ ( t ) (j' = 0,1,2,3 )
Заключение
В кинематической постановке рассмотрена задача оптимального по быстродействию управления стыковкой двух твердых тел во вращающейся системе координат. На основе принципа максимума Л.С. Понтрягина найдено оптимальное решение задачи в предположении, что угловые и поступательные скорости тел ограничены, а при помощи принципа перенесения Котельникова – Штуди – для случая, когда поступательные скорости объектов не ограничены, а угловые скорости ограничены по модулю. Полученные результаты представлены в кватернионной форме. Рассмотрены конкретные примеры, в которых, при заданных граничных условиях, осуществляется построение оптимального решения.
Список литературы Оптимальное по быстродействию кинематическое управление стыковкой твердых тел во вращающейся системе координат
- Стрелкова Н.А. Применение кватернионов к исследованию оптимального по быстродействию кинематического управления стыковкой твердых тел//Вестник Пермского университета. Сер. Математика. Механика. Информатика. Пермь, 2013. Вып. 2(21). С. 66-72.
- Понтрягин Л.С., Болтянский В.Г., Гамкрелидзе Р.В., Мищенко Е.Ф. Математическая теория оптимальных процессов. М.: Наука, 1976. 392 с.
- Белецкий В.В. Движение искусственного спутника относительно центра масс. М.: Наука, 1965. 416 с.
- Диментберг Ф.М. Теория винтов и ее приложения. М.: Наука, 1978. 328 с.
