Подготовка магистров специальности 15.04.06 "Мехатроника и робототехника" к научно-исследовательским и опытно-конструкторским разработкам

Автор: Сологубов Андрей Юрьевич
Рубрика: Вопросы инженерного образования
Статья в выпуске: 3 т.10, 2018 года.
Бесплатный доступ
Для наиболее эффективной подготовки высококлассных и самостоятельных специалистов в области мехатроники и робототехники, способных осуществлять профессиональное сопровождение научно-исследовательских и опытно-конструкторских разработок (НИиОКР), необходима грамотная реализация образовательной программы, раскрывающая структуру и последовательность связанных с конечными целями подготовки магистров к НИиОКР педагогических задач. В статье кратко раскрыта сущность НИиОКР в сфере мехатроники и робототехники, подразумевающая совокупность фундаментальных или прикладных поисковых, теоретических и экспериментальных работ, направленных на создание инновационных орудий труда с элементами искусственного интеллекта, организацию наукоёмких производств и развитие агрегатно-технологического комплекса в целом. Представлены трудовые функции магистранта в рамках НИиОКР, основные этапы НИиОКР, а также перечень профессиональных компетенций, которые должны быть сформированы в процессе обучения. Определены этапы содержания образования, на котором необходимо усваивание знаний и осваивание умений, и этап готовности выпускника к осуществлению трудовой деятельности. В статье представлен проект методического замысла как совокупность ряда решений и предложений, направленных на организацию подготовки магистрантов к НИиОКР. В качестве ориентира даны примеры тем НИиОКР, их цели и достигнутые результаты. Рассмотрены субъекты НИиОКР и требуемая квалификация. Даны рекомендации кафедрам, руководителям НИиОКР. Даны три ступени НИиОКР с окончанием в виде защиты дипломной работы, а также показано, на каком этапе и какие функции осваиваются. Предложена трёхступенчатая последовательная структура II этапа прохождения. Конечно, достижение результатов осложняется нестабильной экономической и образовательной ситуацией, а также нарушением бывших когда-то традиционными связей «технический вуз - производственная единица». Однако чёткое следование предложенным рекомендациям, совместные действия представителей структур вуза, технологической сферы и исполнителей НИиОКР, выраженные в представленном координационном графе, помогут преодолеть выявленные проблемы, а магистру в будущем быть максимально подготовленным и самостоятельным специалистом.
Мехатроника, робототехника, научно-исследовательские и опытно-конструкторские разработки, подготовка высококлассных специалистов, двухэтапная подготовка, трудовые функции, профессиональные компетенции, модель взаимоотношений, разрушения традиционных деловых связей, имитация нииокр, научно-исследовательская практика, практико-ориентированный подход
Короткий адрес: https://sciup.org/147232570
IDR: 147232570 | УДК: 378.442 | DOI: 10.14529/ped180308
Preparation of masters’ students of direction 15.04.06 “Mechatronics and robotics” to research and development activities
For effective preparation of highly-qualified specialists in the field of mechatronics and robotics, capable of carrying out professional support for research and development (R & D), it is necessary to implement the education program that reveals the structure and sequence of pedagogical tasks related to the ultimate goals of preparing masters for research and development activities. The essence of R & D in the field of mechatronics and robotics aimed to create innovative tools with elements of artificial intelligence is given. The organization of science-intensive productions and the development of the aggregate-technological complex is briefly described. The labor functions of an undergraduate are presented in the framework of research and development correlated to the main stages of R & D, as well as a list of professional competencies that must be formed. The stages of education content interiorization are determined. They are mastering of knowledge; mastering of skills; forming of master's student readiness to carry out professional activities. The main purpose of the research is to offer a set of solutions and proposals aimed to organize the preparation of graduates for research and development. The guidelines contain the examples of R & D topics, their goals and the results achieved. The required qualifications of R & D agents are examined. Recommendations to the departments and scientific advisors of R & D are given. Three stages of R & D are described that result in master's thesis defense, and each stage is assigned to the functions being performed. A three-step sequential structure of the second stage is proposed. The achievement of results is complicated by the unstable economic and educational situation, as well as by the violation of the traditional “technical university - production unit” ties. However, the strict adherence to the recommendations, the collaborative efforts of the representatives of the university, technology sector and R & D executors, expressed in the graph presented, will help to overcome the challenges, and to become the most prepared and independent specialist.
Текст научной статьи Подготовка магистров специальности 15.04.06 "Мехатроника и робототехника" к научно-исследовательским и опытно-конструкторским разработкам
Подготовка в магистратуре высококлассных и, что не менее важно, быстро адаптирующихся к совре менным реалиям специалистов, способных заниматься научными исследованиями в профессиональной сфере, создавать инновационные орудия труда, совершенствовать агрегатно-технологический комплекс (медицина, лёгкая промышленность, металлургия), организовывать наукоемкие производства и эффективно внедрять передовые достижения науки в практику не сможет быть полноценный без привлечения магистров к научно-исследовательским и опытноконструкторским разработкам (НИиОКР). На магистерском уровне выполнение НИиОКР фундаментального и прикладного характера становится необходимой составляющей образовательного процесса. Поэтому важным условием качественной подготовки будущих специалистов является привлечение их с первого дня обучения в магистратуре к реальной работе (в том числе и на платной основе) с обучением в процессе реализации конкретных технических проектов. Следовательно подготовка магистров к НИиОКР должна быть инструментирована и выстроена как полноценная педагогическая технология.
Классическое определение педагогической технологии [3, 16, 24] претерпело изменение, и в настоящее время под педагогической технологией, как правило, понимается строго научное проектирование и точное воспроизведение гарантирующих успех педагогических действий [5, 9]. В соответствии с этим определением необходимо выстроить технологию, которая представляет собой совокупность ряда решений и предложений, направленных на организацию подготовки магистрантов к НИиОКР в обозначенной профессиональной сфере мехатроники и робототехники.
«Мехатроника и робототехника» - комплексная инженерная специальность, входящая в число таких научных дисциплин и отраслей промышленности, как:
-
1. Машиностроение;
-
2. Электропривод и автоматизация промышленных установок и технологических комплексов;
-
3. Автоматизированные системы управления технологическими процессами (АСУ ТП).
«Мехатроника и робототехника» завершает этот список, синтезируя и объединяя знания и подходы к технической деятельности в рамках всех вышеописанных дисциплин.
В основе мехатроники и робототехники лежит так называемая «интегральная стратегия», или, как её ещё называют, «механотрон-ный подход» [10, 19]. Это понятие подразумевает объединение самых надёжных, технически и технологически развитых элементов в единую сложную систему с получением синергетического работоспособного результата и создание комплексных машиностроительных единиц с программно-формируемым и управляемым движением (а в перспективе и законами протекания технологических процессов в целом) посредством различной приводимой в движение техники [4, 10, 15].
Таким образом, опираясь на определение НИиОКР («совокупность работ, направленных на получение новых знаний и практическое применение при создании нового изделия или технологии» [22]), можно конкретизировать понятие НИиОКР в сфере мехатроники и робототехники. НИиОКР по мехатронике и робототехнике подразумевает совокупность фундаментальных или прикладных поисковых, теоретических и экспериментальных работ, направленных на определение технической возможности создания новой мехатронной техники.
Следующим после сопровождения этих работ этапом является этап опытно-конструкторских работ (ОКР) и технологических работы (ТР) - комплекса работ по разработке конструкторской и технологической документации на опытный образец, по изготовлению и испытаниям опытного образца изделия, выполняемых по техническому заданию.
Проблематика преподавания мехатроники и робототехники в общем случае затрагивалась рядом авторов [11]. Несмотря на это, вопросы подготовки магистров к НИиОКР рассмотрены недостаточно полно. Обязательность практики осуществления НИиОКР предусмотрена действующим федеральным государственным образовательном стандартом высшего профессионального образования третьего поколения (ФГОС ВПО) [21] для направления 15.04.06 «Мехатроника и робототехника» (квалификация (степень) «магистр»).
ФГОС ВПО ориентирован на следующие профессиональные стандарты (ПС):
1. Специалист по организации и управлению научно-исследовательскими и опытноконструкторскими работами (приказ Минтруда от 11 февраля 2014 г. № 86н) [13].
2. Специалист по автоматизированным системам управления производством (приказ Минтруда от 13 октября 2014 г. № 713н) [14].
НИиОКР входит в один из видов профессиональной деятельности, присущих данным профессиональным стандартам (обобщённая трудовая функция: «Проведение научноисследовательских и опытно-конструкторских работ по АСУП»).
В качестве функций в профессиональной научно-исследовательской деятельности ин-женера-мехатронщика обычно выделяются следующие, указанные в табл. 1 [13, 14].
В процессе обучения у магистранта должны сформироваться следующие профессиональные компетенции (ПК), предусмотренные действующим ФГОС ВПО [21] (в порядке расположения ТФ в табл. 1) (см. табл. 2).
Обобщая представленную в табл. 1 и 2 информацию, на основе ФГОС [21] и ПС [13, 14] получим матрицу знаний инженера-меха-тронщика (табл. 3).
Трудовые функции и компетенции инженера-мехатронщика
Таблица 1
|
Номер трудовой функции (ТФ) |
Сущность |
|
1 |
Анализ научно-технической литературы (НТЛ) |
|
2 |
Патентные исследования |
|
3 |
Разработка экспериментальных образцов |
|
4 |
Проведение теоретических и экспериментальных исследований |
|
5 |
Организация и проведение экспериментов на действующих системах (при необходимости) |
|
6 |
Подготовка отчётов, публикаций и внедрение в практику |
Профессиональные компетенции инженера-мехатронщика
Таблица 2
|
Компетенция (ПК) |
Сущность |
Соответствующая ТФ (по табл. 1) |
|
ПК-4 |
Способность осуществлять анализ научно-технической информации, обобщать отечественный и зарубежный опыт в области мехатроники и робототехники, средств автоматизации и управления, проводить патентный поиск |
1, 2 |
|
ПК-1 |
Способность составлять математические модели (мехатронных и робототехнических) систем, их подсистем, включая исполнительные информационно-сенсорные и управляющие модули, с применением методов формальной логики, методов конечных автоматов, сетей Петри, методов искусственного интеллекта, нечёткой логики, генетических алгоритмов, искусственных нейронных и нейро -нечётких сетей |
4 |
|
ПК-2 |
Способность использовать имеющиеся программные пакеты и, при необходимости, разрабатывать новое программное обеспечение, необходимое для обработки информации и управления в (мехатронных и робототехнических) системах, а также для их проектирования |
3,4 |
|
ПК-3 |
Способность разрабатывать экспериментальные макеты управляющих, информационных и исполнительных модулей мехатронных и робототехнических систем и проводить их исследования с применением современных информационных технологий |
3 |
|
ПК-5 |
Способность разрабатывать методики проведения экспериментов и проводить эксперименты на действующих макетах и образцах мехатронных и робототехнических систем и их подсистем, обрабатывать результаты с применением современных информационных технологий и технических средств |
4, 5 |
|
ПК-6 |
Готовность к составлению аналитических обзоров и научно технических отчётов по результатам выполненной работы, в подготовке публикацией и по результатам исследований и разработок |
1, 2, 6 |
|
ПК-7 |
Способность внедрять на практике результаты исследований и разработок, выполненных индивидуально и в составе группы исполнителей, обеспечивать защиту прав на объекты интеллектуальной собственности |
6 |
Отметим, что в понятии НИиОКР трудовые функции и этапы НИиОКР неотличимы друг от друга и следуют один за другим (а порой и пересекаются и дополняют результаты других этапов). Этот факт формально можно представить в виде графика на рис. 1.
Для достижения ожидаемых результатов необходимо ответить на два вопроса: на каком содержании образования усваивать знания и осваивать умения применять знания к выполнению трудовых действий? когда магистранта можно считать готовым к выполнению трудовых функций и к осуществлению трудовой деятельности?
Следующие элементы содержания образования следует осваивать в предлагаемых нами способах учебно-педагогического взаимодействия.
Таблица 3
ЗУН по профессионал ьному стандарту и аналогии с ФГОС
|
Сущность |
Соответствующая ТФ (по табл. 1) |
Соответствующая ПК (по табл. 2) |
|
|
Трудовые действия |
Анализ конкурентоспособности проектируемой АСУП (или ее элементов) |
1,2 |
ПК-4 |
|
Разработка планов мероприятий по выявлению необходимых параметров качества АСУП (или ее элементов) |
3, 4, 5 |
ПК-1, ПК-2, ПК-3, ПК-5 |
|
|
Подготовка и предоставление руководству отчетов о необходимости внесения изменений по параметрам качества проектируемой АСУП (или ее элементов) |
6 |
ПК-6, ПК-7 |
|
|
Необходимые умения |
Применять нормативную документацию в области проектирования АСУП |
1, 2 |
ПК-4, ПК-6 |
|
Применять методы квалиметрического анализа при проектировании АСУП (или ее элементов) |
3, 4, 5 |
ПК-1, ПК-2, ПК-3, ПК-5 |
|
|
Решать задачи аналитического характера, предполагающих выбор и многообразие актуальных способов решения задач |
3, 4, 5 |
ПК-1, ПК-2, ПК-3, ПК-5 |
|
|
Необходимые знания |
Национальная и международная нормативная база в области АСУП (или ее элементов) |
1, 2 |
ПК-4, ПК-6 |
|
Методы квалиметрического анализа при проектировании АСУП (или ее элементов) |
3, 4, 5 |
ПК-1, ПК-2, ПК-3, ПК-5 |
|
|
Методы разработки информационных, объектных, документных моделей АСУП |
3, 4, 5 |
ПК-1, ПК-2, ПК-3, ПК-5 |
|
|
Другие характеристики |
一 |
一 |
一 |
|
._________________ |
|||||
|
—1 |
------------ |
||||
Анализ НТЛ
Патентные исследования
Проведение теор. и эксп.исследований
Разработка экспериментальных образцов
Организация и проведение экспериментов на действующих объектах
Подготовка отчётов, публикаций и внедрение в практику
Рис. 1. Степень полноты НИиОКР при прохождении соответствующих этапов (осуществление трудовых функций)
Систему мировоззренческих, а также профессиональных идей и взглядов, которые магистрант приобретает в процессе образования, целесообразно осваивать в курсах специальных дисциплин путем наставничества руководителя теоретической подготовки, наставничества производственного руководителя, а также на основе собственного опыта и размышлений магистрантов.
Система требуемых научных знаний, практических умений и навыков осваивается в курсах специальных дисциплин, при прохождении учебных и производственных практик, при написании выпускной квалификационной работы, благодаря наставничеству производственного руководителя, на базе анализа собственного опыта.
Общественный и практический опыт предыдущих поколений отбирается педагогами и магистрантом в соответствии с поставленными целями развития человека, передается ему в виде информации, в процессе взаимодействия с наставниками.
Важно помнить, что наставник - это не только источник теоретических знаний и практических навыков. Это ещё и источник жизненного опыта, который необходимо передать своему подопечному, и таким образом помочь ему сформировать собственную систему мировоззрения, в том числе и взглядов на профессиональную область (первый элемент содержания), приобрести систему научных знаний, умений и навыков (второй элемент содержания) на основе передаваемой информации (третий элемент содержания). Отметим, что при подготовке к НИиОКР важно не столько формирование мировоззрения, сколько умение на основе фундаментальных знаний изучать объект профессиональной деятельности и выделять существующие проблемы в данной области знаний, решение которых необходимо производить на основе поисковых, теоретических и экспериментальных работ.
Таким образом, становится видно, что три элемента содержания в идеале должны быть непрерывно взаимосвязаны друг с другом. С точки зрения иерархии структуры содержания и вклада текущего элемента в развитие следующего предлагается следующая цепочка:
1-я ступень. «Базовая теоретическая подготовка». Контрольная проверка теоретических знаний.
2-я ступень. Лабораторные и практические занятия. Взаимное соотнесение «практика - теория» и «теория - практика». Контрольная проверка практических навыков и умений.
3-я ступень. Прохождение научно-исследовательской (учебной) и научно-производственной практик [8].
На 3-й ступени магистрант находится в «модели взаимоотношений», показанной на рис. 2.

Рис. 2. Система взаимоотношений на 3-й ступени развития специалиста и его подготовки к НИиОКР
Возвратимся к вопросу: когда магистрант готов к выполнению трудовых функций и к осуществлению трудовой деятельности? Магистрант будет готов к выполнению трудовых функций и к осуществлению трудовой деятельности, когда будут поняты объекты профессиональной деятельности - системы, предметы, явления и процессы, на которых направлено воздействие. В их число входят:
-
1) мехатронные и робототехнические системы, включающие информационносенсорные;
-
2) исполнительные и управляющие модули;
-
3) их математическое, алгоритмическое и программное обеспечение;
-
4) методы и средства их проектирования, моделирования, экспериментального исследования и проектирования.
Пример представления объекта профессиональной деятельности показан в виде структурной схемы на рис. 3.
Важно также понимание области профессиональной деятельности, как совокупности объектов профессиональной деятельности в их производственном и научном проявлении. В неё входят: разработка новых методов управления и поиск новых конструктивных
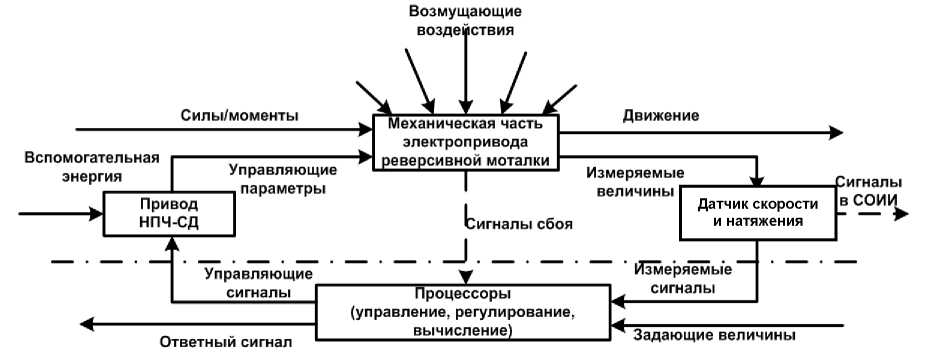
Рис. 3. Структурная схема объекта на примере НИиОКР «Совершенствование мехатронной системы регулирования натяжения на участке смотки полосы стана холодной прокатки 2000 ОАО «ММК» (работа выполнена при участии автора [17])
решений мехатронных и робототехнических систем широкого назначения, их подсистем, проведение исследований в области мехатро-ники, робототехники, теории управления и методов искусственного интеллекта.
После этого можно приступать к практической деятельности. Однако для того, чтобы быть способным принимать участие и профессионально сопровождать НИиОКР, магистру необходимо пройти целый методический комплекс, где руководитель должен помочь ему осваивать приёмы и методики осуществления НИиОКР. Вариантов подготовки немного, поскольку комплексный инжиниринг и синтез машин с новыми свойствами - это, как и любой другой инжиниринг, практикоориентированная деятельность человека. Таким образом, вариантов подготовки два -имитация трудовой деятельности и апробация во время прохождения практик. То есть необходимо использовать интерактивный метод обучения с применением следующих организационных форм:
-
1. Творческие задания и работа в малых группах.
-
2. Обучающие игры (ролевые игры, имитации, деловые игры и образовательные игры).
-
3. Использование общественных ресурсов (приглашение специалиста, экскурсии).
-
4. Совместное обсуждение сложных и дискуссионных вопросов и проблем.
-
5. Разрешение проблем («Дерево решений», «Мозговой штурм», Кейс-метод).
Отметим, что реализация поставленных задач в настоящее время затруднена, поскольку для осуществления НИиОКР и обучения этому нужно плотное взаимодействие технического вуза и производственной единицы.
Группа учёных из ЛЭТИ [12] выделила ряд проблем настоящего времени во взаимоотношениях между вузами и предприятиями, в число которых входят [12]:
1) отсутствие стратегического планирования сотрудничества вуза и производственной единицы, предполагающего целый комплекс мероприятий (целевую подготовку, плановые совместные исследования с участием всего контингента обучающихся, от бакалавров до аспирантов);
2) неинновационный характер российской экономики, большие расходы вуза и производственной единицы на НИР.
Эти проблемы актуальны для многих других технических вузов России, в том числе и для Южно-Уральского государственного университета (ЮУрГУ). Существующая нестабильность в экономике разрушила сложившиеся творческие связи в системе «технический вуз - производственная единица», в результате чего резко сократились заказы на проведение НИиОКР [12]. Предприятия не готовы в настоящий момент предложить магистрантам реальные темы для исследования. Поэтому кафедры находятся в затруднительном положении, связанном с организацией работы для выполнения НИиОКР.
Всё вышесказанное позволяет выделить противоречие, обозначить проблему, сформировать гипотезу и определить способ решения проблемы.
Противоречие: несмотря на требования ФГОС ВПО осуществлять НИиОКР в качестве одного из видов трудовой деятельности специалиста по мехатронике и робототехнике, уровень теоретико-практической подготовки недостаточен для быстрой адаптации нового работника в сфере производства, НИИ и т. д. при его участии в НИиОКР. Инновации настоятельно требуют формирования системы компетенций.
Проблема: каким образом необходимо осуществлять подготовку магистра к НИиОКР, чтобы обеспечить наиболее быструю адаптацию к этим условиям и наискорейшее приобретение полезных навыков при осуществлении НИиОКР в условиях реальной производственной и научной деятельности, а также в условиях нестабильной экономической ситуации и разрушения традиционных связей «технический вуз - производственная единица»?
Гипотеза: необходима чёткая и структурированная практико-ориентированная методология подготовки магистров к НИиОКР с практической имитацией прохождения всех трудовых функций в виде этапов выполнения НИиОКР.
Способ решения: разработка инструментированной и структурированной педагогической технологии подготовки магистров в НИиОКР, в которой обязательно присутствует цикл решения практических задач (в процессе осуществления НИиОКР), подкрепляемых системным изучением специализированных предметов.
В качестве основных взаимодействующих субъектов в НИиОКР выступают: научный руководитель работы (либо группа опытнейших учёных кафедры, выступающих как инициаторы кафедральных НИиОКР); исполнитель работы (группа исполнителей); заинтересованное лицо (производственная единица, осуществляющая заказ и выявляющая необходимость осуществления данной работы, заинтересованная в получении результатов, их внедрении и конечном решении возникшей технической проблемы). Руководителем может быть доктор наук, осуществляющий общее руководство. Индивидуальное (частное) руководство должно осуществляться ведущими преподавателями, имеющими опыт сопровождения в НИиОКР.
Кафедры, выпускающие магистров, должны иметь согласованные с заказчиками направления исследований и связанные с ними специальные дисциплины. Но поскольку существующие связи с производствами в этом плане нарушены, предлагается такой выход. Сбалансировать ранг НИиОКР и направлений исследований (при отсутствии контактов с производством либо же при нежелании делиться информацией и привлекать к участию магистров) или «развертывать инициативные исследования» [12].
Что касается первого варианта, то на любом производстве есть «острые места» с разной степенью требуемой быстроты решения. Если крупные проблемы и направления требуют наискорейшего решения с помощью штатных специалистов вплоть до главного инженера, то магистров можно привлекать к решению менее «острых» задач. В то же время, это должны быть задачи, отвечающие рангу магистра. В этом ему помогут консультации с «теоретиком» и «практиком» (см. рис. 2).
Примеры тем НИиОКР по мехатронике и робототехнике представлены в табл. 4 [6].
Таблица 4
Примеры тем НИиОКР по мехатронике и робототехнике
|
Пример НИиОКР |
Цель |
Результаты |
|
Свободные колебания микромеха- нических акселерометров |
Изучение погрешностей мик-ромеханических измерителей ускорения в условиях воздействия колебаний из-за внешних возмущений |
Не раскрываются |
|
Конечно-элементное исследование колебаний микромеханического гироскопа (ММГ) роторного типа |
Разработка моделей микроме-ханических гироскопов по МКЭ |
Методология создания конечноэлементных имитационных моделей гироскопов, позволяющих моделировать их работы в 3Р-прост-ранстве |
|
Совершенствование мехатронной системы регулирования натяжения на участке смотки полосы стана холодной прокатки 2000 ОАО «Магнитогорский металлургический комбинат» ( при участии автора ) |
Разработка адаптивной системы управления нестационарными намоточно -размоточными механизмами |
Простая адаптивная система управления, позволяющая обойтись без мат. модели при разработке регуляторов и исключить ряд программных блоков, снизив расчётную нагрузку на программируемый логический контроллер |
Таблица 5
Основные специальные дисциплины программы
|
Специальные дисциплины программы |
Сущность дисциплины |
|
Цифровые системы управления |
Содержание дисциплины охватывает круг вопросов, связанных с проектированием цифровых систем управления, синтезом алгоритмов управления, повышением динамических и точностных характеристик систем данного класса |
|
Управление неполноприводными роботами |
Изучаются физические принципы функционирования и особенности задач управления неполноприводными роботами, методы трансверсальной линеаризации уравнений движения роботов и синтеза регуляторов, стабилизирующих программное движение, методы анализа устойчивости замкнутых систем управления роботами |
|
Кинематика и динамика управляемых механических и робототехнических систем |
Материал данной дисциплины основан на изучении вопросов, посвященных механике систем твердых тел, управляемых манипуляционных и локо-моционных робототехнических систем. Изучаются проблемы эффективного, высокоточного регулирования робототехнических устройств с использованием современных методов оптимального и адаптивного управления, вопросы их проектирования и моделирования |
|
Бесконтактные средства локальной ориентации роботов (сенсорные технологии в робототехнике) |
Дисциплина направлена на изучение принципов функционирования и организации бесконтактных технических средств измерения параметров движения мобильных роботов, их пространственного местоположения и ориентации, рассматриваются типовые структуры измерительных средств мобильных роботов и их взаимодействие с другими устройствами и системами |
|
Робототехнические системы и комплексы |
Изучаются основные этапы проектирования механики роботов, методы математического описания исполнительных механизмов и методы синтеза позиционных и контурных систем управления роботами |
|
Цифровая техника систем управления |
Изучаются способы цифровой реализации устройств управления, их типовые элементы и достигаемые результаты, основные особенности процессов цифрового преобразования информации, физические ограничения их влияние на свойства систем управления |
Напомним, что прежде чем приступать к НИиОКР по данному направлению, в сознании будущего магистра мехатроники и робототехники объект его работы должен быть сформирован как система активно взаимодействующих элементов, определены информационные взаимосвязи (целевая синергетическая функция), известно назначение входного для системы сигнала, прохождение его через систему взаимосвязанных элементов внутри мехатронной системы. Для этого ему необходимо освоение комплекса основных специализированных дисциплин, примеры которых указаны в табл. 5 [7, 20]. Переломным моментом будет то, что лекции должны быть ориентированы не только на фундаментальные знания, но и на проблемы в данной области науки и техники с последующим обсуждением возможных путей решения на семинарах и практических занятиях. Содержание практических занятий и технических семинаров в основном определяются тематикой НИиОКР.
В процессе теоретической подготовки магистранты учатся составлять схемы алгоритмов управления мехатронными системами, пишут тексты программ на одном из языков программирования, отлаживают программы. Разрабатывают собственные мехатронные модули, устройства и машины.
Освоение данных дисциплин даст будущему магистру главное представление - управляемый технологический агрегат, как механо-тронная система со своими входными и выходными сигналами, а также внешними воздействиями и возмущениями [25-30] (см. рис. 3).
Таким образом, магистру необходимо пройти 2-стадийную подготовку (табл. 6).
Таблица 6 Двухстадийная программа подготовки к НИиОКР магистров специальности
15.04.06 «Мехатроника и робототехника»
|
Номер стадии |
Суть |
|
I |
Теоретическая подготовка |
|
II |
Имитация осуществления НИиОКР с прохождением всех этапов (трудовые функции в данном случае выступают в качестве этапов НИиОКР) |
Стоит отметить, что эти стадии имеют «параллельный» характер осуществления, причём I стадия не является основной. Ключевой является стадия II. В стадию I входит цикл освоения специальных дисциплин программы 15.04.06 «Мехатроника и робототехника», ключевые из которых представлены в табл. 5.
Магистру, который будет участвовать в НИиОКР, назначается учебный руководитель (научный руководитель) и производственный руководитель (при осуществлении производственной НИиОКР) со своими целеполагающими функциями, которые посвятят своего подопечного в цели и задачи НИиОКР, в которые могут входить [6, 17]:
Развитие и проведение фундаментальных и прикладных НИиОКР в области создания мехатронных и робототехнических, работающих в заданном диапазоне выходной величины (в том числе на микроуровне и наноуровне), исследований по макро- и микрометрологии ( дисциплины: « Цифровые системы управления», «Управление неполноприводными роботами», «Бесконтактные средства локальной ориентации роботов (сенсорные технологии в робототехнике)», «Цифровая техника систем управления») .
Совершенствование существующих элек-троприводных систем и АСУ ТП (например, в металлургии) до уровня мехатронных комплексов ( дисциплины: « Цифровые системы управления», «Кинематика и динамика управляемых механических и робототехнических систем», «Робототехнические системы и комплексы» ) [17].
Обеспечение интенсивного обновления традиционных подходов разработки приводных систем в сторону создания аналогий движителям живых организмов ( дисциплины: « Цифровые системы управления», «Управление неполноприводными роботами», «Кинематика и динамика управляемых механических и робототехнических систем») .
Рекомендации преподавателю-руководителю НИиОКР [8]:
-
1. Проанализировать и подобрать темы НИиОКР. Обосновать вместе с исполнителем (группой исполнителей) актуальность (при самостоятельном инициировании НИиОКР). В случае производственного заказа в этом нет необходимости.
-
2. Охарактеризовать и дополнить НИиОКР по другим признакам (характер контактов, характер координации проектов, продолжительность, число участников).
-
3. Указать проблему, сформулировать цели и задачи НИиОКР, учебный материал по предмету и межпредметные связи, которые должны быть задействованы в ходе выполнения НИиОКР.
-
4. Продумать практическую (теоретическую) значимость НИиОКР.
-
5. Поддерживать профессиональное развитие исполнителей НИиОКР.
-
6. Применять методы инженерного творчества и ТРИЗ (теория решения изобретательских задач).
-
7. Подумать, как могут быть оформлены результаты НИиОКР.
-
8. Обозначить формы контроля этапов выполнения НИиОКР.
-
9. Предложить критерии оценки успешности НИиОКР
-
10. Подумать, какой психолого-педагогический эффект возможен в результате выполнения данного НИиОКР.
После прохождения I этапа (теоретического) наступает II этап, где подготовка магистров к НИиОКР должна также происходить ступенчато.
В число данных ступеней войдут:
-
1. Научно-исследовательская практика (НИП). Данная ступень выступает как подготовительная ступень, готовящая магистрантов к будущей профессиональной деятельности, помогающая им овладеть азами исследовательской работы, осваивать технологии и методы НИиОКР.
-
2. Самостоятельная учебная научноисследовательская и опытно-конструкторская разработка (СНИиОКР). Вторая по очереди ступень подготовки магистрантов к НИиОКР.
-
3. Самостоятельная кафедральная НИиОКР (КНИиОКР) или промышленная НИиОКР (ПНИиОКР) по заказу производственной единицы. Третья ступень вовлечения магистрантов в научно-исследовательскую работу также предполагает два варианта действий. Эта ступень отличается от предшествующих повышенным уровнем самостоятельности студентов и их более глубоким участием в сопровождении реальной НИиОКР.
На этом этапе руководитель работы вместе с подконтрольной группой распределяет поисковые задачи. В круг поисковых задач входят декомпозиция объекта исследования на элементы и поиск НТЛ и патентов по декомпозированным узлам исследуемого объекта, формирование каждой из подгрупп «частного банка данных», где собрана информация о том, что сделано, какие моменты остались неясными или неполными. После формирования частного банка данных руководитель вместе с подопечными собирает общий банк данных. Вместе они производят «мозговой штурм» с целью синтеза частных банков данных в общий банк данных и соотнесения информации с другими банками и выявления направления работы по НИиОКР.После этого, они оформляют отчёт о литературно-патентных исследованиях, заверяемых руководителем, самими исполнителями и проректором по научной работе.
На этом этапе магистрант осваивает такие трудовые функции, как: 1) анализ научнотехнической литературы; 2) патентные исследования; 3) подготовка отчётов.
На данной ступени магистрант под руководством преподавателя проводит самостоятельную НИР, либо ОКР, работая над индивидуальным учебно-практическим проектом. В зависимости от уровня подготовленности магистранта, СНИиОКР на данном этапе акцентируется либо на учебных, либо на исследовательских аспектах. В первом варианте СНИиОКР акцент переносится на учебную деятельность, он адресован менее подготовленным студентам, имеющим заниженную склонность к исследовательской и конструкторской работе. Педагогическая задача этого варианта СНИиОКР - под руководством преподавателей сформировать базовые компетенции исследовательской, конструкторской и опытной деятельности (в зависимости от направления профессиональной подготовки) уровня лаборанта-исполнителя. Данный пример хорошо иллюстрируется на опыте подготовки по профилю «Электропривод и Автоматика» в Псковском государственном университете [23].
Во втором варианте СНИиОКР акцент смещен на исследовательскую деятельность. Этот вариант деятельности предназначен для магистров, обладающих склонностью к исследовательской и конструкторской работе. Педагогическая задача данного варианта -сформировать компетенции творческой исследовательской деятельности. Эта задача достигается в ходе выполнения самостоятельного индивидуального исследовательского, конструкторского или опытного проекта -при научном руководстве и систематических консультациях преподавателя-руководителя.
На этом этапе магистрант осваивает такие трудовые функции, как: 1) анализ научнотехнической литературы; 2) патентные исследования; 3) проведение теоретических и экспериментальных исследований; 4) подготовка отчётов, публикаций.
Первый вариант третьей ступени - это участие магистранта в кафедральной НИиОКР (грантовой, хоздоговорной или плановой) на правах младшего соучастника проекта, со своим участком работы. Педагогической задачей этого варианта является формирование компетенций работы в исследовательской команде, участия в дискуссиях, обсуждениях, оформления результатов НИиОКР, написания научных статей и т. д. По сути дела, этот вариант предполагает полноправное участие студентов в НИиОКР на правах младшего сотрудника единой исследовательской команды.
Второй вариант третьей ступени - это участие студента в НИиОКР в качестве ведущего специалиста, выполнение им собственного исследовательского проекта до уровня создания полезной модели или экспериментального продукта. Должна быть предоставлена возможность зарегистрировать разработку (в виде программного продукта или полезной модели).
Педагогическая задача варианта состоит в завершающем формировании компетенций ученого-исследователя, конструктора и т. д. В данном варианте руководство КНИиОКР или ПКНИиОКР магистранта осуществляется либо через систему студенческого научного общества (СНО), либо систему молодежного научно-технического творчества (МНТТ), либо студенческих конструкторских бюро (СКБ) (которые, к сожалению, в последнее время незаметны или отсутствуют в российской высшей школе), либо пилотных молодёжных инновационных проектов, а также через формирование рабочих групп на факультете по каждому из направлений НИиОКР под руководством ректора, проректоров, деканов [2, 23].
Возможны и другие варианты.
На этом этапе магистрант осваивает такие трудовые функции, как: 1) анализ научнотехнической литературы; 2) проведение теоретических и экспериментальных исследований; 3) патентные исследования; 4) разработка экспериментальных образцов; 5) организация и проведение экспериментов на действующих системах; 6) подготовка отчётов, публикаций и внедрение в практику.
Завершиться данный этап должен защитой ВКР, которая должна представлять собой законченную теоретическую или экспериментальную НИиОКР, которая связана с решением актуальной научно-технической проблемы. Защита должна происходить по классической схеме: предзащита + защита. С той лишь разницей, что при участии в КНИиОКР предзащита и защита будет происходить на кафедрах (выступающих при отсутствии контактов с производственными единицами в роли организаторов «развёртывания инициативных исследований» [12]), а при участии в ПНИиОКР по заказу производственной единицы предзащита сначала пройдёт на площадке производственной единицы с участием как членов кафедры, так и участников производства рангом не ниже мастера. Защита должна происходить на базе университета. Цель предзащиты -представить результаты НИиОКР как перед теоретиками, так и перед практиками, и выявить готовность производства принять заключительные результаты НИиОКР.
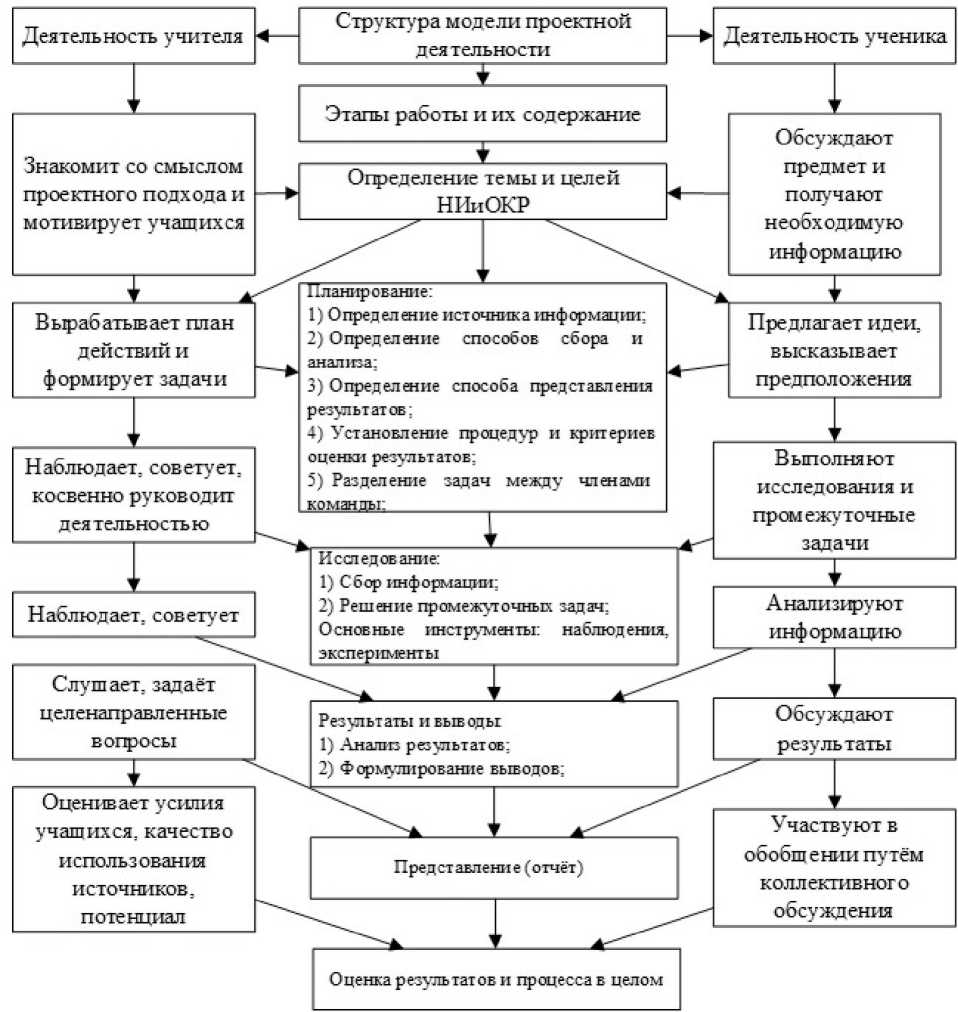
Рис. 4. Координационный граф модели взаимодействия руководителя (учителя) и магистра (ученика) в процессе осуществления НИиОКР
Во всех трёх этапах взаимодействие руководителя (учителя) и магистра (группы магистров) (ученика) осуществляется по схеме на рис. 4.
Таким образом, описанная выше система организации НИиОКР рассчитана на подготовку выпускников к проведению исследовательских работ любого уровня, согласно полученной в вузе квалификации и направлению подготовки 15.04.06 «Мехатроника и робототехника».
В будущем, когда инженер-мехатронщик попадёт в аспирантуру, на производство или на работу в НИИ, то он будет владеть комплексом основных профессиональных дисциплин, представляющих ему сущность объектов его работы, а также навыки произведения НИиОКР после прохождения 3 этапов участия в НИиОКР во время обучения в магистратуре [1, 18].
Список литературы Подготовка магистров специальности 15.04.06 "Мехатроника и робототехника" к научно-исследовательским и опытно-конструкторским разработкам
- Аржанов, В.А. Особенности подготовки магистров в области техники и технологий / В.А. Аржанов, А.И. Одинец, В.В. Пшеничникова // Омский науч. вестн. - 2010. - № 4 (89). - С. 165-168.
- Афанасьев, Н.С. Научно-исследовательская практика магистрантов технических специальностей в ходе подготовке к самостоятельной НИиОКР / Н.С. Афанасьев // Совет ректоров. - 2015. - № 5. - С. 43-47.
- Беспалько, В.П. Слагаемые педагогической технологии / В.П. Беспалько. - М.: Педагогика, 1989. - 192 с.
- Васильева, С.Н. Принципы построения и современные тенденции развития мехатронных систем / С.Н. Васильева, Э.В. Гринцевич // Вестн. Волжского ун-та им. В.Н. Татищева. - 2010. - № 16. - С. 37-41.
- Зайцев, В.С. Современные педагогические технологии / В.С. Зайцев. - Челябинск: ЧГПУ, 2012. - 411 с.
- Мехатроника, робототехника, микроэлектромеханические приборы. Выполненные НИиОКР CompMechLab. - http://fea.ru/ compound/mechatronics-robototechnics-mems.
- Направление подготовки 15.04.06, 2017, (2.0), Мехатроника и робототехника. - https://www.susu.ru/ru/plan/150406-2017-20-mehatronika-i-robototehnika-25776.
- Научно-исследовательская подготовка магистров техники и технологии / сост. А.П. Пудовкин, Ю.Н. Панасюк. - Тамбов: ТГУ, 2014. - 34 с.
- Олешков, М.Ю. Педагогическая технология: проблема классификации и реализации / М.Ю. Олешков // Профессионально-педагогические технологии в теории и практике обучения: сборник научных трудов. - Екатеринбург: РГППУ, 2005. - С. 5-19.
- Подураев, Ю.В. Введение / Ю.В. Подураев // Мехатроника: основы, методы, применение. - М.: «Машиностроение», 2007. - С. 10.
- Проблематика преподавания мехатроники в технических вузах / В.А. Дьяченко, С.Н. Колпашников, С.О. Никифоров, И.Б. Челпанов // Мехатроника, автоматизация, управление. - 2003. - № 9. - С. 52-54.
- Проблемы и варианты сотрудничества технического вуза с российскими предприятиями-производителями и потребителями электротехнической продукции / С.Н. Балан, Д.В. Самохвалов, М.П. Белов и др. // Планирование и обеспечение подготовки кадров для промышленно-экономического комплекса региона. - 2015. - № 1. - С. 152-159.
- Профстандарт: 40.008 Специалист по организации и управлению научно-исследовательскими и опытно-конструкторскими работами. - http://www.pravo.gov.ru/proxy/ ips/?docbody=&link_id=152&nd=102350016&bpa=cd00000&bpas=cd00000&intelsearch=%CE+%CF%C5%D0%D1%CE%CD%C0%CB%DC%CD%DB%D5+%C4%C0%CD%CD% DB%D5++.
- Профстандарт: 40.057 Специалист по автоматизированным системам управления производством. - http://pravo.gov.ru/ proxy/ips/?docbody=&nd=102372609&intelsearch=%EF%EE%F1%F2%E0%ED%EE%E2%EB%E5%ED%E8%E5+%EF%F0%E0%E2%E8%F2%E5%EB%FC%F1%F2%E2%E0+%EE%F2+13.10.2014+%B91048.
- Пупков, К.А. Комплексирование технологий управления в интеллектуальных системах высокой точности и надёжности / К.А. Пупков, А.И. Гаврилов, Г.А. Шахназаров // Вестн. Рос. ун-та дружбы народов. Серия «Инженерные исследования». - 2011. - № 4. - С. 60-67.
- Селевко, Г.К. Современные образовательные технологии / Г.К. Селевко. - М.: Нар. образование, 1998. - 256 с.
- Сологубов, А.Ю. К вопросу использования искусственных нейронных сетей в системах управления электроприводами переменного тока намоточно-размоточных механизмов станов холодной прокатки / А.Ю. Сологубов, В.Н. Фарыма // Электротехника: сетевой электрон. науч. журн. - 2017. - № 1 (4). - С. 24-37.
- Стромов, В.Ю. Модель организации научно-исследовательской деятельности студентов в вузе / В.Ю. Стромов, П.В. Сысоев // Высшее образование в России. - 2017. - № 10. - С. 75-82.
- Таржанов, И.В. Особенность мехатронного подхода в робототехнике / И.В. Таржаев // Изв. высш. учеб. заведений. Машиностроение. - 2013. - № 3. - С. 36-38.
- Учебный план подготовки магистров по направлению подготовки 15.04.06 Мехатроника и робототехника, Магистерская программа: 15.04.06 Интеллектуальные технологии в робототехнике. - http://csi.ifmo.ru/ education/plans/plan_8.html
- Федеральный государственный образовательный стандарт высшего образования по направлению подготовки 15.04.06 Мехатроника и робототехника (уровень магистратура). - http://www.consultant.ru/document/ cons_doc_LAW_173673/c940e8349e4e483c40a215fa743cfa70155fd5cb/.
- Федеральный закон «О науке и государственной научно-технической политике» от 23.08.1996 г. № 127-ФЗ. - http://www. consultant.ru/document/cons_doc_LAW_11507/.
- Хитров, А.П. Инженерная подготовка по профилю «Электропривод и Автоматика» направления «электроэнергетика и электротехника» в Псковском государственном университете / А.П. Хитров // Вестник ПсковГУ. Серия «Технические науки». - 2015. - № 1. - С. 61-78.
- Щуркова, Н.Е. Педагогическая технология / Н.Е. Щуркова. - М.: Пед. общество России, 2002. - 224 с.
- Allen, G. Mechatronics Engineering: A Critical Need for This Interdisciplinary Approach to Engineering Education / G. Allen // Proceedings of the IJME-INTERTECH Conference on Synergistic Integration of Mechanical Engineering with Electronics. - 2006. - P. 1-21.
- Cabibihan, J.J. Effectiveness of student engagement pedagogies in a mechatronics module: A 4-year multi-cohort study / J.J. Cabibihan // Journal of the NUS teaching academy. - 2013. - № 3 (4). - P. 125-149.
- Jovanovic, V. Developing an Option in Mechatronics System Design within the Mechanical Engineering Technology Program / V. Jovanovic, A. Verma, M.M. Tomovic // International Forum on Systems and Mechatronics. - 2013.
- Mechatronic Education at Faculty of Technical Sciences Novi Sad / G. Ostojic, V. Jovanovic, D. Kozak et al. // Tehnicki Vjesnik. - 2015. - № 22 (3). - P. 709-715.
- DOI: 10.17559/TV-20140225111636
- Saleem, A. Mechatronic system design course for undergraduate programmes / A. Saleem, T. Tutunji, L. Al-Sharif // European Journal of Engineering. - 2011. - № 36 (4). -P. 341-356.
- DOI: 10.1080/03043797.2011.593094
- Samanta, B. Development of A Mechatronics Studio Course in Mechanical Engineering / B. Samanta, Zh. Yong. - http:// asee-coed.org/index.php/coed/article/view/ Samanta_Development.
