Резонансы сил и скоростей

Автор: Попов И.П.
Журнал: Вестник Пермского университета. Математика. Механика. Информатика @vestnik-psu-mmi
Рубрика: Механика. Математическое моделирование
Статья в выпуске: 4 (47), 2019 года.
Бесплатный доступ
Даны определения резонансов сил и скоростей. Показано, что при параллельном соединении инертного тела, упругого элемента и демпфера в системе может возникать резонанс сил. При последовательном соединении этих элементов может возникать резонанс скоростей. Классический механический резонанс является резонансом сил.
Резонанс сил, скоростей, параллельное соединение, последовательное, источник силы, скорости
Короткий адрес: https://sciup.org/147245468
IDR: 147245468 | УДК: 534.014.2 | DOI: 10.17072/1993-0550-2019-4-62-66
Resonances of forces and velocities
The definitions of resonances of forces and velocities are given. It is shown that with a parallel connection of an inert body, an elastic element and a damper, a resonance of forces may occur in the system. When these elements are connected in series, a velocity resonance may occur. The classic mechanical resonance is a resonance of forces.
Текст научной статьи Резонансы сил и скоростей
Широко известное дифференциальное уравнение d2xdx a + a + ax = a, sin го t(1)
2 dt21 dt 0
[1] имеет решение x = xx + x 2, где
%! = ae-bt sin(rojt + a)(2)
– собственные затухающие колебания, x2 = A sin(ro t -ф)(3)
- вынужденные колебания, a, a - постоянные интегрирования, b = a1-, ro, = J ro2 - b2
2 a 10
ro o =

A = I 8°,
(1 -X 2 ) 2 + 4 h 2X 2
(4а)
2 h X tg ф= 1 —v
! _ ro , _ ba
, X , h , 8° .
ro° ro°
При подстановках a2 = m , a1 = r, a0 = k, am = F(6)
уравнение (1) превращается в классическое дифференциальное уравнение вынужденных механических колебаний [2–7]:
d2xdx m + r + kx = F sin rot(7)
dt2
dv или m— + rv + kJ Vdt = F sinrot.(7а)
При
ro = . (8)
m имеет место резонанс.
Нам известна теоретическая электротехника, объекты и процессы которой математически изоморфны механическим [8–10]; при этом различают два резонанса – резонанс напряжений и резонанс токов.
В 1873 г. Дж. Максвелл ввел первую (из двух) систему электромеханических аналогий, в соответствии с которой напряжение дуально силе, а ток – скорости. В этой связи возникает закономерный вопрос: резонанс применительно к уравнению (7) это резонанс сил или скоростей?
Ответ на этот и связанные с ним вопросы составляет предмет настоящего исследования.
Определение 1. Резонанс сил – это резонанс, возникающий на частоте (8) в механической системе, включающей инертное тело и упругий элемент, при котором развиваемые ими реактивные силы максимальны и противоположны.
Определение 2. Резонанс скоростей – это резонанс, возникающий на частоте (8) в механической системе, включающей инертное тело и упругий элемент, при котором развиваемые ими скорости максимальны и противоположны.
Резонанс сил
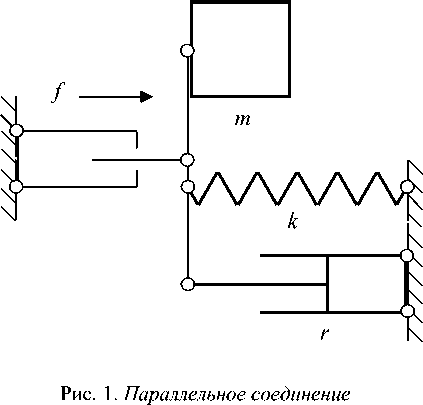
Уравнению (7) соответствует схема параллельного соединения (рис. 1), при котором инертное тело и изменения размеров упругого элемента и демпфера имеют единую скорость, а их реактивные силы складываются. При этом сумма реактивных сил потребителей механической мощности равна силе, развиваемой источником механической мощности, который подобно источнику напряжения в электротехнике можно назвать источником силы.
kF fk =kx = /=^= ю^( k/ ю- m ю) + r2
гd f-=mw= m ю2 F
=--12 ю^( k /ю-m ю) + r2
81п( ю t - ф ). (9)
81п( ю t -ф ). (10)
При выполнении условия (8)
f =
kF 81п( ю t - ф )
mkF
=------81п( ю t - ф ) =
r k m mkF
= —----------81п(юt - ф) = ю r kF
=---81п( ю t - ф ) .
ю r
f * =- m
—
mkF
------81П( ю t - ф ) =
—
r юmmFF . z ,
—.--- 81п( ю t - ф ) =
Теорема 1 . При выполнении условия (8) в механической системе, состоящей из параллельно соединенных инертного тела, упругого элемента и демпфера, что соответствует уравнению (7), возникает резонанс сил.
Доказательство
В соответствии с (4)–(6)
и
—
ю mF . z, -----81П( ю t - ф ) .
r
Выражения (11) и (13) показывают, что f * равны и противоположны. (9) и (12),
(10) и (14) показывают, что f * и f * максимальны.
Теорема доказана.
A = F k
F
2 \2 22
, mю I .rm m ю
1--I + 45
k J 4 m2 кk
________________1_____________________
)/ k yj ( к / ю- m ю ) 2 + r2
F
ю^( к / ю- m ю ) 2 + r2
.
В установившемся режиме x = A 81п(ю t -ф) =
F
=---, 81п( ю t - ф ) .
юА( к/ ю- m ю ) + r2
Следствие 1.1. В первую (максвелловскую) систему электромеханических аналогий необходимо добавляется следующее дуальноинверсное соответствие – последовательное соединение потребителей электрической мощности при резонансе напряжений дуально параллельному соединению потребителей механической мощности при резонансе сил.
Следствие 1.2. При резонансе сил реактивная сила системы упругий элемент – инертное тело равна нулю, поскольку f k‘ =- f * .
Величину mk по аналогии с электротехникой можно назвать волновым сопротивлением (системы).
Следствие 1.3. Если 4mk > r, то реак- тивные силы, развиваемые инертным телом и упругим элементом, превышают приложен- тельного соединения в соответствии с (2) определяются выражением f = ae-bt sin(м11 + a) = ную силу.
Пример 1. F = 100 Н, м = 2 рад/с, m = 10 кг, к = 40 кг - с-2, r = 5 кг - с-1.
Найти f k * и f m * .
k
= ae 2 r sin
k k2 _ ----t + a .
m 4 r
В соответствии с (12) и (14)
fk =
40 - 100
2 - 5
sin( м t - ф ) = 400sin( м t - ф ) (Н),
Вынужденные колебания силы на штоке источника скорости для последовательного соединения в соответствии с (3) определяются выражениями
2 - 10 - 100 . ,
fm =---Sin(м t -ф) =
A =
= - 400sin( « t - ф ) (Н).
Реактивные силы, развиваемые инерт-
7 (1 -X 2 ) 2 + 4 h 2X 2
V м m
ным телом и упругим элементом, превышают приложенную силу.
Последовательное соединение
m 2 k 2 m m
1 -м2— + 4—- — м2 — k J 4 r2 k k
V м m
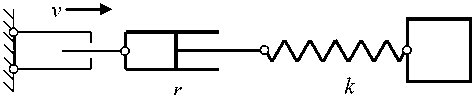
Инертное тело, упругий элемент и демпфер можно соединять не только параллельно, но и последовательно (рис. 2).
I 1 м 1 мm. I---I
\^м m k J
+ 2 h X _ tgф = 7-7-2 = 2
1 - X
k м m
,
+ —
r
m
Рис. 2. Последовательное соединение
2 r k 1 -м 2 m/k
м m
r м m (1/ м m -м/ k ) f 2 = A sin( м t - ф ) =
V sin м t - arctg
r (1/ м m - м/ k )
.
r 2
При последовательном соединении к элементам системы приложена единая сила, а скорости инертного тела и изменения размеров упругого элемента и демпфера складываются. При этом сумма скоростей потребителей механической мощности равна скорости, развиваемой источником механической мощности, который подобно источнику тока в электротехни- ке можно назвать источником скорости.
Скорости компонентов системы равны vm = “Jfdt mJ
1dx 1df vk = — k— = ——, vr k dt k dt v = -V cos м t.
f
, r
v m + v k + vr = v ,
1 df f 1
---+ — +— fdt = -V cos м t k dt r m или
Резонанс скоростей
Справедлива
Теорема 2. При выполнении условия (8) в механической системе, состоящей из после- довательно соединенных инертного тела, упругого элемента и демпфера, что соответствует уравнению (15), возникает резонанс скоростей.
Доказательство
В установившемся режиме
V f = . sin(мt - ф) .
4 [1(м m) - м/ k ]2 +1/ r2
vm = fdt = m
1 V cos( м t - ф )
м m 7 [км m) -м/ k ]2+vr2 ’
v k
1 df м V cos( м t -ф )
--=-- 1 . (17)
k dt k 7[ 1 ( м m ) - м/ k ] 2 +1/ r2
При выполнении условия (8)
1 V cos( ro t — ф )
mmm izi m j k ju mm mm/ )
—
Vr
J= cos( ro t — ф ) = mk
—
cos( ro t — ф ) =
Vr
--cos( и t — ф ) . го m
km v k = k
V cos( ro t — ф )

Vr
-j= cos( ro t — ф ) = mk
и Vr cos( ro t — ф ) и Vr , .
--- v ^ = — cos( o t — Ф ). (21) k m mk k
Выражения (18) и (20) показывают, что v k И v m равны и противоположны. (16) и (19), (17) и (21) показывают, что v k и vm максимальны. Теорема доказана.
Следствие 2.1. В первую (максвелловскую) систему электромеханических аналогий необходимо добавляется следующее дуальноинверсное соответствие - параллельное соединение потребителей электрической мощности при резонансе токов дуально последовательному соединению потребителей механической мощности при резонансе скоростей.
Следствие 2.2. При резонансе скоростей точка приложения силы к системе упругий элемент-инертное тело неподвижна, поскольку vk =— vm .
Следствие 2.3. Если Vmk < r , то ско- рости, развиваемые инертным телом и упругим элементом, превышают скорость штока источника воздействия.
Пример 2. V = 10 м-с-1, r = 80 кг-с-1, остальные данные из примера 1. Найти vk и * V m.
В соответствии с (19) и (21)
10 - 80 2 - 10
vm
cos( и t — ф ) = = — 40 cos( ro t — ф ) (м - с '1 ) ,
*

2 - 10 - 80
cos( и t — ф ) =
= 40 cos( и t — ф ) (м - с -1 ).
Скорости, развиваемые инертным телом и упругим элементом, превышают скорость штока источника воздействия.
Артефакты
Существуют устройства в удовлетворительном приближении способные выполнять функции источников силы и источников скорости. Источником гармонической скорости может выступать привод с кривошипнокулисным механизмом и маховиком с большим моментом инерции. Источником гармонической силы может выступать шток пневмоцилиндра, полость которого сообщается с полостью другого пневмоцилиндра с диаметром неизмеримо выше, чем у первого, а поршень совершает гармонические колебания.
В работе [11] описана механическая система из двух инертных тел и двух упругих элементов, для которой обнаружено " удивительное явление ": точка приложения гармонической силы остается неподвижной. Это явление, казалось бы, очевидным образом названо антирезонансом. Степень неудачности этого термина можно оценить, применив его к резонансу токов в электротехнике.
В действительности упомянутая система представляет собой суперпозицию " элементарных " систем, рассмотренных выше. По этой причине процессы, происходящие в ней, являются суперпозицией соответствующих процессов, одним из которых и был резонанс скоростей, ошибочно принятый за " антирезонанс " . При этом неподвижность точки приложения гармонической силы ( " удивительное явление " ) соответствует следствию 2.2.
Заключение
Таким образом, можно сделать вывод, что описываемый в курсах теоретической механики механический резонанс является резонансом сил. Ему соответствует параллельное соединение инертного тела, упругого элемента и демпфера. При последовательном соединении этих элементов возникает резонанс скоростей.
Список литературы Резонансы сил и скоростей
- Попов И.П. Применение символического (комплексного) метода для расчета сложных механических систем при гармонических воздействиях // Прикладная физика и математика. 2019. № 4. С. 14-24. DOI: 10.25791/pfim.04.2019.828
- Попов И.П. Механические аналоги реактивной мощности // Вестник Пермского университета. Математика. Механика. Информатика. 2015. № 3(30). С. 37-39.
- Попов И.П. О мерах механического движения // Вестник Пермского университета. Математика. Механика. Информатика. 2014. № 3 (26). С. 13-15.
- Попов И.П., Парышев Д.Н., Ильтяков А.В., Моисеев О.Ю., Мосин А.А., Харин В.В. Механическая реактивная инерционная мощность // Естественные и технические науки. 2018. № 10 (124). С. 130-132.
- Попов И.П., Парышев Д.Н., Ильтяков А.В., Моисеев О.Ю., Мосин А.А., Харин В.В. Инерционная и полная мощности при периодических воздействиях // Естественные и технические науки. 2019. № 3 (129). С.183-186. 10.25633/ETN. 2019.03.01. DOI: 10.25633/ETN.2019.03.01
- Попов И.П., Парышев Д.Н., Ильтяков А.В., Моисеев О.Ю., Харин В.В. Деформационная и полная мощности при периодических воздействиях // Естественные и технические науки. 2019. № 5(131). С. 165-168. 10.25633/ETN. 2019.05.10.
- DOI: 10.25633/ETN.2019.05.10
- Попов И.П. Мощность, развиваемая при механических гармонических воздействиях // Вестник Калужского университета. 2018. № 4. С. 86-89.
- Попов И.П. Комбинированные векторы и магнитный заряд // Прикладная физика и математика. 2018. № 6. С. 12-20.
- DOI: 10.25791/pfim.06.2018.329
- Попов И.П. Емкостно-инертное устройство // Известия Санкт-Петерб. гос. электротехн. ун-та "ЛЭТИ". 2015. Т. 2. С. 43-45.
- Попов И.П. Построение абстрактной модели силового поля типа электромагнитного // Наука. Инновации. Технологии: науч. журн. Северо-Кавказского Федер. ун-та. 2015. № 2, ч. 1. С. 41-54.
- Пановко Я.Г., Губанова И.И. Устойчивость и колебания упругих систем: Современные концепции, парадоксы и ошибки. М.: Наука, 1987. 352 с.
