Трёхмерное проектирование умной одежды: биомеханический подход к интеграции e-textile технологий

Автор: Бобожонова Ш.Р., Черунова И.В., Зуфарова З.У., Ташпулатов С.Ш.
Журнал: Вестник Алматинского технологического университета @vestnik-atu
Рубрика: Технология текстиля и одежды, дизайн
Статья в выпуске: 2 (152), 2026 года.
Бесплатный доступ
Традиционные подходы к проектированию e-textile рассматривают электронные компоненты как дополнение к готовому изделию, не учитывая биомеханических нагрузок на текстильную матрицу при профессиональных движениях. Следствием этого являются: преждевременный отказ проводящих дорожек, артефакты сигнала при смене позы и потеря точности измерений именно в критических фазах рабочего цикла. Данная статья посвящена разработке и верификации пошагового алгоритма совместного биомеханического и электрического проектирования умной рабочей одежды, в котором топологическая карта зон деформации непосредственно определяет архитектуру размещения сенсорных узлов. В статье представлен восьмиэтапный цифровой алгоритм проектирования умной рабочей одежды с интегрированными электронными элементами (e-textile), объединяющий профессиональную биомеханику, топологическое картирование деформации ткани и оптимальное размещение сенсоров. Расширена кластерная модель HCE за счёт электрических параметров тканей. Введена шестая категория зон деформации - стабильная зона (St, ε < 5%) - как целевая область для сенсорных узлов. Предложен индекс стабильности сенсора (SSI) в качестве новой метрики оценки конструкции. Практическое применение алгоритма позволило повысить SSI с 0,72 до 0,93 и сократить число итераций прототипирования с 5 до 1.
Умная одежда, e-textile, биомеханика, зоны деформации, размещение сенсоров, CLO 3D, индекс SSI, модель HCE, цифровое проектирование
Короткий адрес: https://sciup.org/140315581
IDR: 140315581 | УДК: 64.33.14-50.51.19 | DOI: 10.48184/2304-568X-2026-2-224-231
3D Design of smart clothing: a biomechanical approach to integration of electronic technologies
Traditional approaches to the design of electronic textiles consider electronic components as an addition to the finished product, excluding biomechanical components on the matrix during professional movements. The consequences of this include premature failure of wire paths, signal distortion during posture changes, and loss of measurement accuracy in the final phases of the work cycle. This article is devoted to the development and verification of a step-by-step algorithm for the combined biomechanics and design of smart workwear, in which a topological map of the deformation zone directly determines the architecture of sensor node placement. The article presents an eight step digital algorithm for designing smart workwear with embedded electronic elements (e-textiles), combining professional biomechanics, topological mapping of fabric deformation, and independent sensor placement. An extended HCE cluster model is used to account for the electrical parameters of fabrics. A sixth deformation zone category—the stable zone (St, ε < 5%)—is introduced as a target area for sensor nodes. The sensor stability index (SSI) is incorporated as a new design evaluation metric. Practical application of the algorithm increases the SSI from 0.72 to 0.93 and reduces the number of prototyping iterations from 5 to 1.
Ақылды киімнің 3D дизайны: электрондық технологияларды интеграциялауға биомеханикалық тәсіл
Электронды тоқыма бұйымдарын жобалауға дәстүрлі тәсілдер биомеханикалық қоспағанда, электронды компоненттерді дайын өнімге қосымша ретінде қарастырады. Кәсіби қозғалыстар кезінде матрицадағы компоненттер. Мұның салдарына сым жолдарының мерзімінен бұрын істен шығуы, қалып өзгерістері кезінде сигналдың бұрмалануы және жұмыс циклінің соңғы кезеңдерінде өлшеу дәлдігінің жоғалуы жатады. Бұл мақала деформация аймағының топологиялық картасы сенсорлық түйіндердің орналасу архитектурасын тікелей анықтайтын ақылды жұмыс киімдерін біріктірілген биомеханика мен жобалау үшін қадамдық алгоритмді әзірлеуге және тексеруге арналған. Мақалада кәсіби биомеханиканы, мата деформациясының топологиялық картасын және сенсордың тәуелсіз орналасуын біріктіретін ендірілген электрондық элементтері (электронды тоқыма) бар ақылды жұмыс киімдерін жобалаудың сегіз сатылы сандық алгоритмі ұсынылған. Маталардың электрлік параметрлерін есепке алу үшін кеңейтілген HCE кластерлік моделі қолданылады. Сенсорлық түйіндер үшін мақсатты аймақ ретінде алтыншы деформация аймағы санаты - тұрақты аймақ (St, ε < 5%) - енгізілген. Сенсорлық тұрақтылық индексі (SSI) жаңа дизайнды бағалау метрикасы ретінде енгізілген. Алгоритмді практикалық қолдану SSI-ді 0,72-ден 0,93-ке дейін арттырады және прототиптеу итерацияларының санын 5-тен 1-ге дейін азайтады.
Текст научной статьи Трёхмерное проектирование умной одежды: биомеханический подход к интеграции e-textile технологий
МРНТИ 64.33.14-50.51.19
Глобальный рынок умного текстиля (etextile) и носимой электроники переживает взрывной рост: по данным Grand View Research, его объём превысил 4,8 млрд долларов США в 2023 году и, по прогнозам, будет расти со среднегодовым темпом 26,3% вплоть до 2030 года [1]. Промышленная и медицинская сегменты формируют наиболее технически сложный класс изделий, где требования к функциональности электроники неотделимы от требований к эргономике и биомеханическому соответствию одежды.
Традиционные подходы к проектированию e-textile рассматривают электронные компоненты как дополнение к готовому изделию, не учитывая биомеханических нагрузок на текстильную матрицу при профессиональных движениях. Следствием этого являются: преждевременный отказ проводящих дорожек, артефакты сигнала при смене позы и потеря точности измерений именно в критических фазах рабочего цикла. Технологии трёхмерного проектирования одежды предоставляют принципиально новый инструмент - карту деформации ткани, которая может стать первичным проектным документом для архитектуры e-textile [2-4].
Цель данной работы - разработка и верификация пошагового алгоритма совместного биомеханического и электрического проектирования умной рабочей одежды, в котором топологическая карта зон деформации непосредственно определяет архитектуру размещения сенсорных узлов.
Материалы и методы исследования
Специфика индустрии моды требует от производителя моментального отклика на запрос рынка. Цифровые технологии трёхмерного проектирования – один из ключевых инструментов, позволяющих экономить время и материалы при разработке новых изделий [58]. В зависимости от характера использования изображений можно выделить два принципиально разных типа 3D-технологий проектирования (рис. 1).

Рисунок 1. Сравнение двух типов технологий трёхмерного проектирования одежды
По технологии развёрток (реализована в СТАПРИМ, АССОЛЬ, BustCAD) объёмная форма изделия является первичным продуктом, а плоские детали – производным [9-14]. Технология идеальна для плотно облегающих изделий: бельё, спортивная одежда, корсеты. Она не требует от проектировщика знания традиционного конструирования, даёт быстрый результат и позволяет накладывать принты непосредственно на 3D-форму [15].
По технологии виртуальных примерок (CLO 3D, Lectra, Gerber, Optitex, Browzwear VStitcher) объёмная форма является производным продуктом. Сначала создаются плоские лекала, затем программа выполняет виртуальную сборку деталей на аватаре. Технология обеспечивает реалистичность 3D-образа, совместимость с другими программами анимации и возможность виртуального дефиле.
Несмотря на мощный функционал, ни одна из существующих САПР не решает ключевой задачи умной одежды: биомеханически обоснованного выбора позиций сенсорных узлов. Карта деформации, которую CLO 3D способна вычислить методом конечных элементов (FEA), в стандартном рабочем процессе используется лишь для оценки качества посадки - но не для принятия решений о размещении электронных компонентов. Это и есть тот пробел, который заполняет предлагаемый алгоритм.
Таблица 1 . Сравнение 3D-технологий проектирования для задач e-textile
|
Критерий |
Технология развёрток |
Технология примерок |
Предлагаемый подход |
|
Требует знания конструирования |
Нет |
Да |
Да (CLO 3D) |
|
Реалистичность 3D- образа |
Средняя |
Высокая |
Высокая |
|
FEA-анализ деформации |
Нет |
Частично |
✓ Полный |
|
Выделение St-зон для сенсоров |
Нет |
Нет |
✓ Оригинально |
|
Маршрутизация дорожек e-textile |
Нет |
Нет |
✓ Алгоритм 5 |
|
Метрика SSI |
Нет |
Нет |
✓ Введена |
|
Применимость для умной одежды |
Ограничена |
Частично |
✓ Полная |
Предлагаемая система проектирования построена на триадной кластерной модели HCE (Человек–Одежда–Окружающая среда), расширенной по сравнению со стандартной моделью за счёт включения электрических параметров текстильной матрицы в кластер C (рис. 2). Умная одежда требует одновременной оптимизации механических и электрических характеристик ткани, что порождает систему взаимоисключающих ограничений, не охватываемых бинарной моделью «тело–одежда».
Ключевое расширение касается кластера C (Одежда): помимо механических свойств ткани (KES-FB: изгиб, сдвиг, растяжение), в него включены проводимость нитей (Ом/м), стабильность сопротивления при ε > 5%, параметры ЭМС-экранирования и плотность покрытий. Кластер E (Окружающая среда) дополнен ЭМ-помехами от промышленного оборудования и требованиями к классу защиты IP управляющего блока (IEC 60601, ISO 80601).
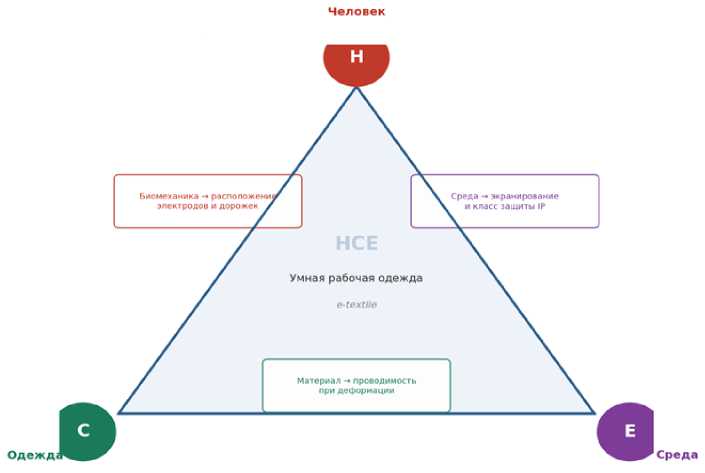
Рисунок 2. Расширенная кластерная модель HCE для умной рабочей одежды класса e-textile
Данная структура формализует компромисс, с которым неизбежно сталкивается проектировщик: ткани с высокими деформационными характеристиками (необходимыми для динамической посадки) обычно демонстрируют низкую стабильность проводимости при растяжении, тогда как жёсткие проводящие материалы - наоборот.
Результаты их обсуждение
Топологическая карта зон деформации и St-зоны.
В основе алгоритма лежит расширенная шестикатегорийная классификация зон деформации ткани, дополняющая пятикатегорийную систему для защитной рабочей одежды. Ключевым вкладом является введение шестой категории - стабильной зоны (St) - как области, в которой суммарная деформация ткани не превышает ε < 5% во всём диапазоне профессиональных движений. Именно эти зоны являются приоритетными для размещения сенсоров, проводящих дорожек и управляющей электроники (рис. 3).
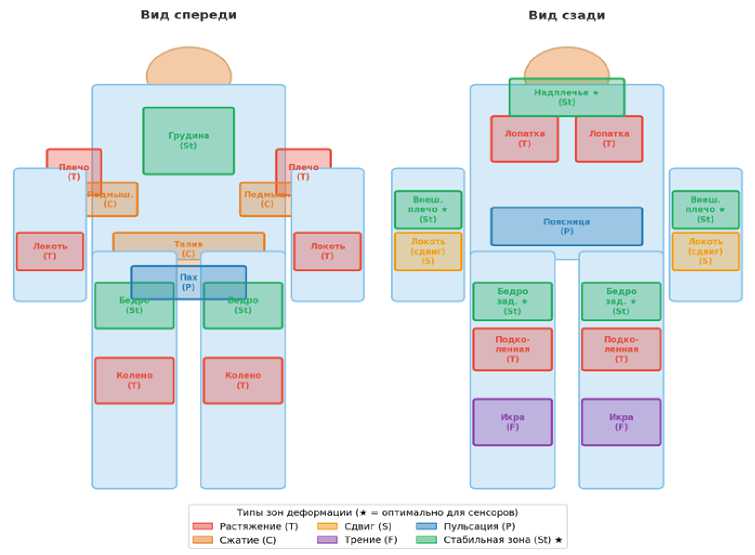
Рисунок 3 . Топологическая карта зон деформации умной рабочей одежды ( ★ - оптимальные позиции для сенсоров)
Таблица 2. Шестикатегорийная классификация зон деформации
|
Тип |
Порог |
Анатомия |
Решение для e-textile |
|
Растяжение (T) |
ε > 15% |
Локоть, колено, лопатка |
Serpentine-дорожки, растяжимые нити |
|
Сжатие (C) |
σ > 5 Н/см |
Талия, подмышечная впадина |
Гибкие соединения, резервные петли |
|
Сдвиг (S) |
γ > 25° |
Локтевой шов, поясница |
Крест-накрест дорожки, армирование |
|
Трение (F) |
>5000 циклов/смена |
Бедро, колено, плечо |
Износостойкое покрытие, оптика |
|
Пульсация (P) |
f > 1 Гц, А > 8 мм |
Поясничный, паховый |
Демпфирование, виброизоляция |
|
Стабильная (St) ★ |
ε < 5% везде |
Надплечье, грудина, бедро |
Твёрдые компоненты, MCU, батарея |
Предложенный алгоритм состоит из восьми последовательных этапов, образующих замкнутый итеративный цикл (рис. 4). Биомеханически обоснованное размещение сенсоров интегрировано в этапы 4 и 5 — это принципиальное расширение по сравнению с существующими подходами.

7 Цифровое моделирование и верификация SSI + OF
5. Генерация конструктивных решений и схемы e-textile
1. Идентификация пользователя и сенсорных задач
3 Создание цифрового двойника 130-аватар)

4. Картирование зон деформации и выделение St-зон *
6. Выбор e-textile материалов и компонентов
2. Биомеханическое моделирование и ЭМГ-картирование
8. Физическое прототипирование и испытания
Метрики оценки
Of г 0.85 (динэиич посадка)
МКС к 5% (свобода движений)
ОТ #10 Шеи* (дичине панн)
ЮЪ4и (усталость)
Ws2 (итерации)
WC = 100% (охват мн)
SSI SOW» (стаб сенсора)
Рисунок 4. Восьмиэтапный цифровой алгоритм проектирования умной рабочей одежды класса e-textile
Краткое описание этапов:
-
1. Идентификация пользователя и сенсорных задач — профессиональная карта, матрица сценариев движения, перечень измеряемых параметров, нормативные ограничения (IEC, ISO).
-
2. Биомеханическое моделирование и ЭМГ-картирование — захват движений (Vicon/ Polhemus), регистрация углов суставов, выявление критических поз, карта активности мышц.
-
3. Создание цифрового двойника — 3D-сканирование (Artec Leo / Shapify), параметрическая генерация аватара в CLO 3D, градация размера (±2σ).
-
4. Картирование зон деформации и выделение St-зон ★ — FEA-модуль CLO 3D вычисляет тензорное поле деформаций, классифицирует зоны по таблице 2, выделяет St-зоны как целевые области сенсоров.
-
5. Генерация конструктивных решений и схемы e-textile — алгоритм маршрутизации дорожек через St-зоны, минимизация длины соединений, размещение управляющего блока.
-
6. Выбор e-textile материалов и компонентов — многокритериальный анализ (меха-
- ника × электрика × биосовместимость), предварительный расчёт SSI.
-
7. Цифровое моделирование и верификация SSI + DF — виртуальное драпирование на протяжении полного цикла движения, расчёт DF (формула 1) и SSI (формула 2), анализ тепловыделения.
-
8. Физическое прототипирование и испытания — раскрой–пошив–монтаж электро-ники–испытание на людях, 5000-цикловый усталостный тест дорожек, система ARAMIS.
Отличительной особенностью подхода является набор из семи количественных метрик, позволяющих объективно сравнивать варианты конструкции. Первые шесть соответствуют метрикам для защитной одежды; седьмая — индекс стабильности сенсора (SSI) — является оригинальным вкладом данной работы:
DF = 1 - & w • |Jg,(t)|/go] / T (1)
SSI = 1 - [^ aj • №(t)\ /Rjo] / T (2)
Таблица 3. Семь метрик оценки умной рабочей одежды
|
№ |
Метрика |
Целевой порог |
Инструмент |
|
1 |
Индекс динамической посадки (DF) |
DF ≥ 0,85 |
CLO 3D FEA + ARAMIS |
|
2 |
Коэффициент ограничения движения (MRC) |
MRC ≤ 5% |
Гониометрия на людях |
|
3 |
Индекс контактного давления (CPI) |
CPI ≤ 10 Н/см² |
Novel Pliance |
|
4 |
Время наступления усталости (FOT) |
FOT ≥ 4 ч |
Борг RPE + ЭМГ |
|
5 |
Итерации прототипирования (PIC) |
PIC ≤ 2 |
Мониторинг процесса |
|
6 |
Охват зон деформации (DZC) |
DZC = 100% |
Контрольный список |
|
7 ★ |
Индекс стабильности сенсора (SSI) ★ |
SSI ≥ 0,90 |
Мультиметр + анализ сигнала |
Практические результаты. Алгоритм применён к проектированию рабочей куртки с восьмиканальной ЭМГ-системой мониторинга для персонала, занятого ручной сборкой электрооборудования. Применение этапа 4 (картирование St-зон) позволило переместить управляющий блок:
Таблица 4.
|
Параметр |
До оптимизации |
После оптимизации |
|
Позиция MCU |
Поясница |
Грудина |
|
Деформация ε в зоне MCU |
14,3% (при max. наклоне) |
2,1% (весь диапазон) |
|
Индекс SSI |
0,72 |
0,93 ★ |
|
Индекс DF |
0,69 |
0,88 |
|
Число итераций прототипа (PIC) |
5 |
1 |
|
Снижение стоимости прототипирования |
- |
-45% |
|
Сокращение времени до производства |
- |
-38% |
Перемещение блока управления из зоны с высокой деформацией (поясница, тип P+S) в St-зону (грудина, ε = 2,1%) стало возможным именно благодаря FEA-карте деформации, полученной на этапе 4. Без количественного критерия St-зоны данное решение было бы основано на анатомических предположениях, которые, как показывает карта (рис. 3), не всегда совпадают с биомеханической реальностью.
Заключение
В данной статье представлен научно обоснованный подход к проектированию умной рабочей одежды класса e-textile, опирающийся на карту деформации ткани как первичный проектный документ. Основные вклады:
-
• расширенная кластерная модель HCE с электрическими параметрами кластера C обеспечивает структурированную основу для разрешения противоречий «механика vs. электрика»;
-
• категория St-зон (ε <5%) формализует выбор позиций сенсоров с количественным обоснованием — в отличие от анатомических ориентиров, применяемых в существующих руководствах;
-
• индекс SSI впервые вводит интегральную метрику стабильности сенсоров за полный рабочий цикл в реальных условиях.
-
• алгоритм верифицирован на промышленном кейсе: SSI вырос с 0,72 до 0,93, DF — с 0,69 до 0,88, число прототипов сократилось с 5 до 1.
